

Презентация 2
.docПрезентация 2. Способы математического описания линейных динамических систем
2.1 Пространство переменных состояния 2
2.2 Передаточная функция 4
2.3 Структурная математическая модель 7
2.4 Основные правила преобразования структурных схем 7
2.1 Пространство переменных состояния
Любую линейную динамическую систему можно представить в виде линейного дифференциального уравнения n-го порядка. Известно, что такое дифференциальное уравнение можно преобразовать в систему дифференциальных уравнений первого порядка, в которой число уравнений равно порядку исходного уравнения (рисунок 2.1):

Рис. 2.1:
aij и bij – некоторые постоянные коэффициенты, ui(t) – входные сигналы (воздействия на систему)
Однако, описывая систему автоматического управления, важно выделить еще и выход системы (выходные сигналы):
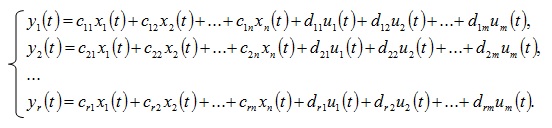
Рис. 2.2:
cij и dij – некоторые постоянные коэффициенты, yi(t) – выходные сигналы (выходы системы)
Используя матричное представление, получим следующее описание линейного динамического объекта или системы автоматического управления (рисунок 2.3):
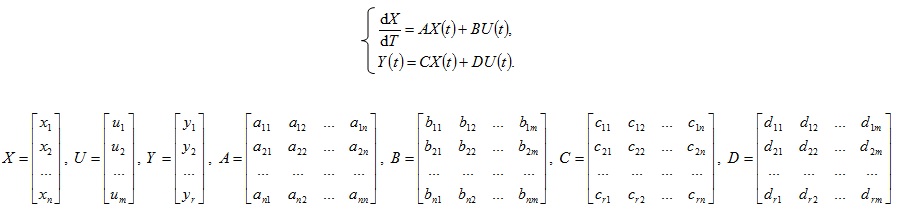
Рис. 2.3
Показанный на рисунке 2.3 способ математического описания носит название пространства переменных состояния, где U – вектор входных сигналов, Y – вектор выходов системы, A – матрица системы, B – матрица передачи входного воздействия на систему, C – матрица наблюдения, D – матрица мгновенной прямой передачи входного сигнала на выход, а X – вектор состояния, предоставляющий информацию о состоянии объекта или системы в тот или иной момент времени.
Примечание. Легко заметить, что в случае одного входа матрица B трансформируется в вектор-столбец, а в случае одного выхода матрица C в вектор-строку.
2.2 Передаточная функция
Понятие передаточной функции выводится на основании применения преобразования Лапласа к описанию в виде пространства переменных состояния.
Важно отметить, что аппарат передаточной функции применяется лишь к линейным стационарным системам. Кроме того, начальные условия для вектора состояния X должны быть нулевыми.
После применения преобразования Лапласа с учетом перечисленных допущений система, показанная на рисунке 2.3 примет следующий вид:
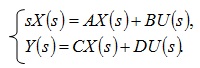
Рис. 2.4
Выражая X(s) из первого уравнения и подставляя его во второе, получаем окончательный результат (рисунок 2.5).
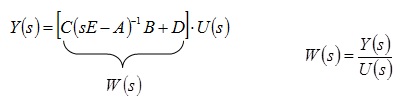
Рис. 2.5
Выражение, обозначенное как W(s) и есть передаточная функция, связывающая вход с выходом.
Определение. Передаточной функцией называется отношение изображения по Лапласу выходного сигнала к изображению по Лапласу входного.
В случае множества входов и выходов передаточная функция представляет собой матрицу функций, связывающих i-й выход с j-м входом, как показано на рисунке 2.6.
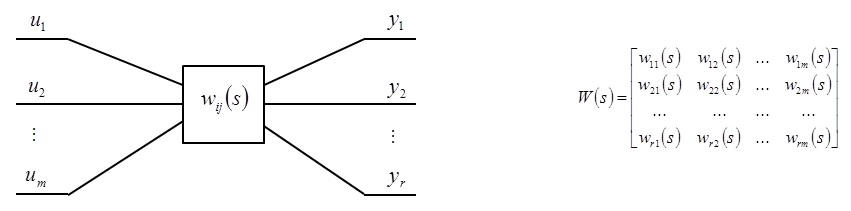
Рис. 2.6
Каждый элемент матрицы представляет собой дробно-рациональную функцию в виде отношения двух полиномов (см. рисунок 2.7). Обратите внимание, что порядок полинома числителя не может превышать порядок полинома знаменателя. Это связано с физической реализуемостью исследуемого объекта или системы.
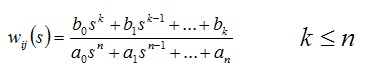
Рис. 2.7
Порядок полинома знаменателя n совпадает с количеством дифференциальных уравнений пространства переменных состояния и называется порядком системы.
Примечание. В дальнейшем будем рассматривать только случаи с одним входом и одним выходом.
На рисунке 2.8 приведены несколько примеров передаточных функций.

Рис. 2.8
2.3 Структурная математическая модель
Наряду с пространством переменных состояния и передаточной функцией в теории автоматического управления очень широко используется графическое описание объекта или системы, называемое структурной схемой или структурной математической моделью.
На рисунке 2.9 приведены основные элементы структурных схем, используя которые можно придавать графическую форму различным математическим формулам и выражениям.
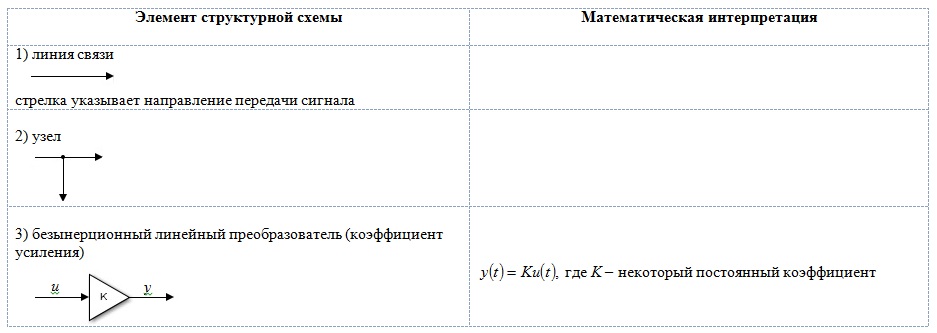
2.9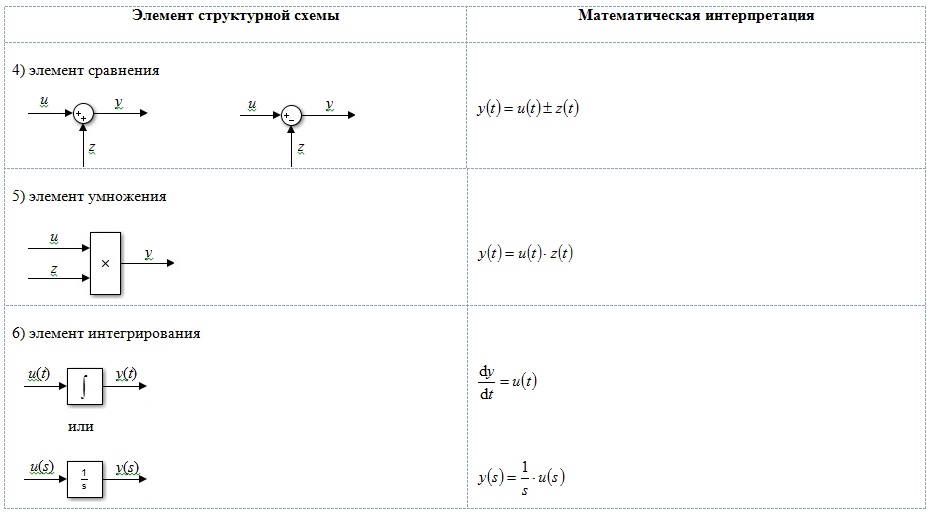
Рис. 2.9 (продолжение)
2.4 Основные правила преобразования структурных схем
Рассмотрим основные правила преобразования структурных схем (см. рисунок 2.10). Пусть Wi(s) – некоторые передаточные функции, связывающие вход и выход соответствующих преобразователей.
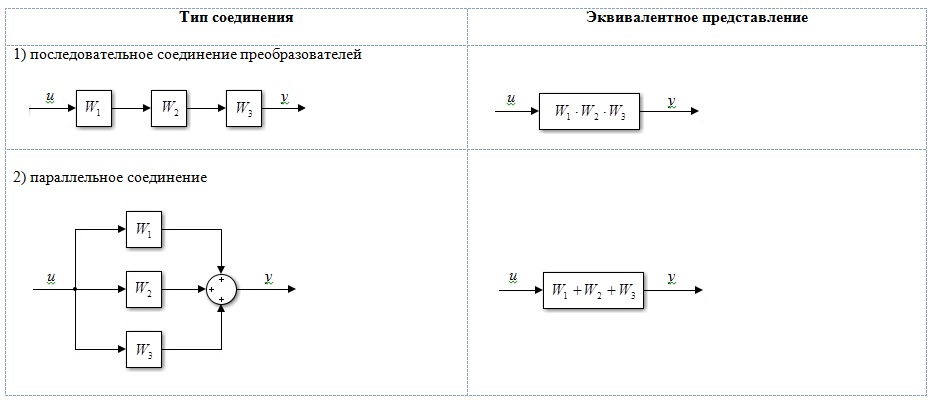
Рис.2.10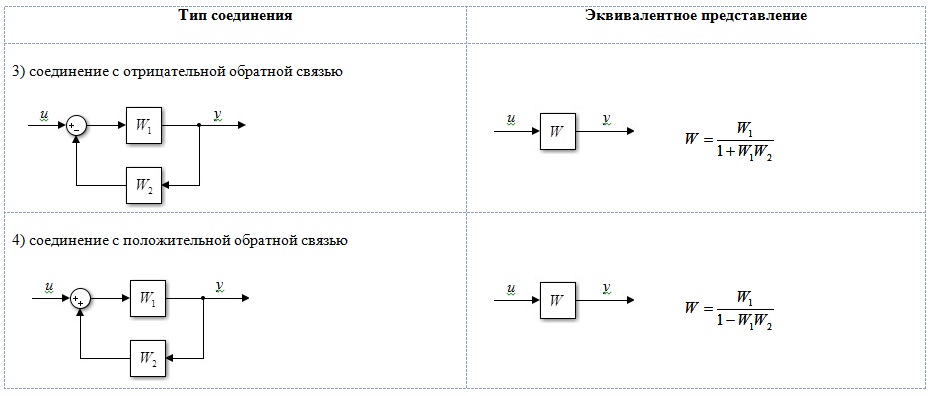
Рис. 2.10 (продолжение)