

1.3.Моделирование движения корабля на подводных крыльях
Исходные данные:
1. Масса КПК: M = 9,4 т = 9400 кг.
Мощность ГЭУ: Nmax = 400 л. с. = 735,5 Вт/л. с. * 400 л. с. = 294200 Вт.
2. Максимальная сила тяги корабля: Fmax = Nmax/vmax = 294200 Вт/5,7 м/с = 519890 Н.
3. Допустимое изменение силы тяги за единицу времени: ΔFmax = 0.2Fmax = 0.2*519890 Н/с = 103978 Н/с.
4. Скорость начала глиссирования: vk = 11 уз = 5,7 м/с;
5. Скорость выхода на крылья: v1max = 13 уз = 6,7 м/с;
6. Максимальная скорость движения на крыльях: v2max = 32 уз = 16,5 м/с.
Разработка математической модели движения:
1. Шаг приращения времени (принимается): Δt = 1 с.
2. Относительное (в процентах от максимальной) допустимое изменение силы тяги за время Δt = 1 с:
ΔPi/Δt ≤ 20 %/c.
3. Коэффициент пропорциональности силы сопротивления движению:
- при v < vk: A1 = Fmax/v1max2 = 11624;
- при v ≥ vk: A2 = Fmax/v2max2 = 1918.
Непрерывная модель КПК (уточненная) имеет вид:

Разностная модель КПК (уточненная) имеет вид:

В таблице 3 приведены результаты моделирования при максимальной тяге.
На рисунке 3 представлены графики основных зависимостей движения КПК, по которым определяются основные динамические параметры движения.
Таблица 3 - Результаты моделирования разностной модели КПК
Режим |
T, c |
P, % |
vi+1, м/с |
xi+1, м |
Режим |
T, c |
P, % |
vi+1, м/с |
xi+1, м |
|
«Вперед» |
0,0 |
0,0 |
0,0 |
0,0 |
«Реверс» |
15,0 |
100,0 |
16,4 |
161,1 |
|
|
1,0 |
20,0 |
0,5 |
0,1 |
|
16,0 |
80,0 |
16,0 |
177,4 |
|
|
2,0 |
40,0 |
1,9 |
1,2 |
|
17,0 |
60,0 |
15,0 |
193,0 |
|
|
3,0 |
60,0 |
3,7 |
3,9 |
|
18,0 |
40,0 |
13,6 |
207,4 |
|
|
4,0 |
80,0 |
5,1 |
8,3 |
|
19,0 |
20,0 |
11,9 |
220,3 |
|
|
5,0 |
100,0 |
6,6 |
14,0 |
|
20,0 |
0,0 |
10,0 |
231,4 |
|
|
6,0 |
100,0 |
10,6 |
22,5 |
|
21,0 |
-20,0 |
7,8 |
240,4 |
|
|
7,0 |
100,0 |
13,2 |
34,4 |
|
22,0 |
-40,0 |
4,3 |
247,0 |
|
|
8,0 |
100,0 |
14,8 |
48,4 |
|
23,0 |
-60,0 |
0,7 |
249,6 |
|
|
9,0 |
100,0 |
15,6 |
63,6 |
|
24,0 |
-80,0 |
-2,9 |
248,7 |
|
|
10,0 |
100,0 |
16,0 |
79,4 |
|
|||||
|
11,0 |
100,0 |
16,2 |
95,6 |
|
|||||
|
12,0 |
100,0 |
16,4 |
111,9 |
|
|||||
|
13,0 |
100,0 |
16,4 |
128,2 |
|
|||||
|
14,0 |
100,0 |
16,4 |
144,7 |
|
|||||
Основные динамические параметры КПК:
время набора максимальной скорости 16,4 м/с – 12 с из них:
– в водоизмещающем режиме – 4,5 с,
– в режиме глиссирования – 0,5 с,
– на крыльях – 7 с;
до выхода на крылья КПК проходит расстояние 8,3 м;
дистанция глиссирования – 100 м;
время торможения – 9 с, при этом КПК проходит расстояние 250 м.
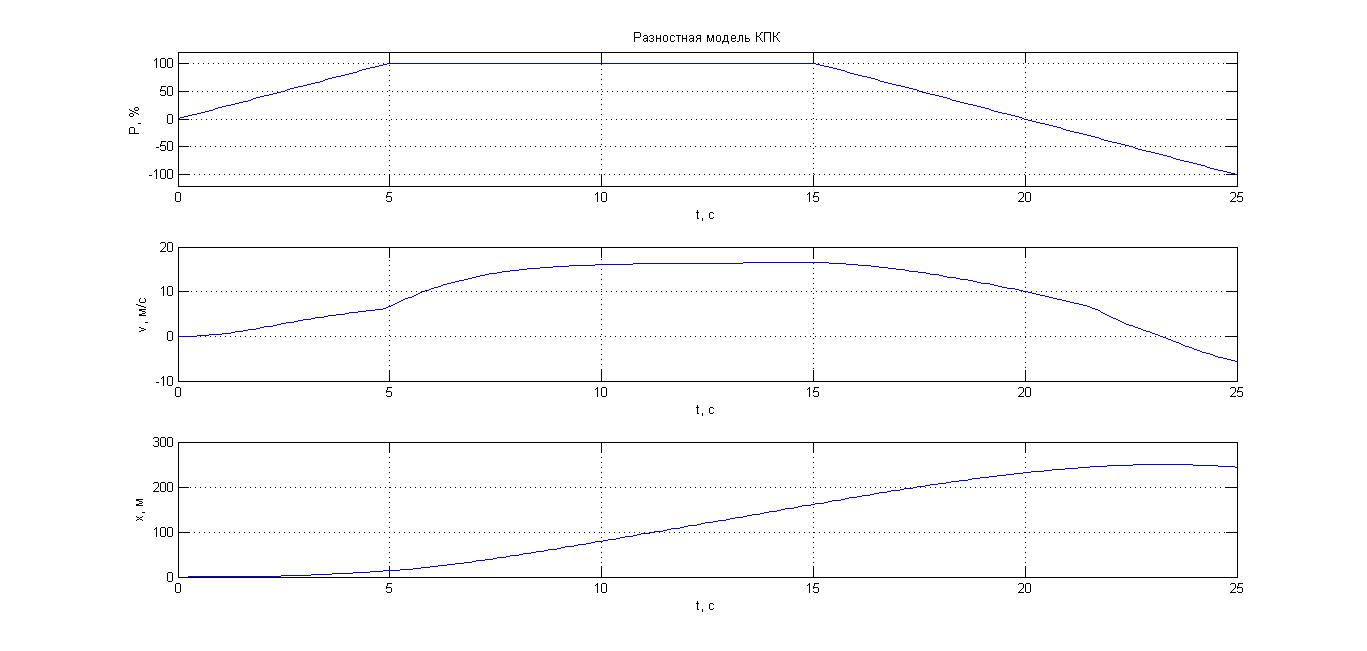
Рисунок 3 – Основные зависимости движения НК