

15. Механические характеристики двигателя последовательного возбуждения.
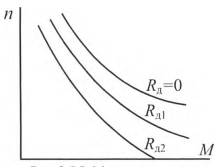
Механические характеристики представляют зависимости частоты вращения двигателя от момента n = f(M) при Uc = Un = const, и Rд= const. Характеристику без добавочного сопротивления называют естественной, с добавочным сопротивлением — искусственной.
В не
насыщенной области ,
момент двигателя пропорционален квадрату
тока или квадрату потока, и тогда для
механической характеристики справедливы
формулы:
,
момент двигателя пропорционален квадрату
тока или квадрату потока, и тогда для
механической характеристики справедливы
формулы:


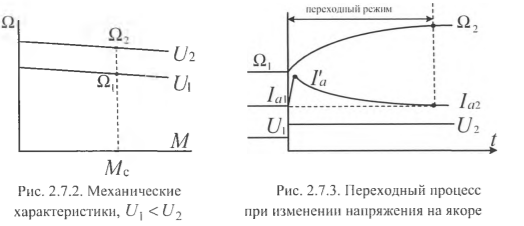
 Механические
характеристики представлены на рисунке
ниже.
Механические
характеристики представлены на рисунке
ниже.
При Rд=0 – это естественная характеристика.
По мере роста нагрузки они отклоняются от зависимости формулы, представленной выше, становясь всё более прямолинейными. Эти характеристики искусственные и всегда устойчивы. Как только n будет меньше нуля, то это будет режим противовключения, т.е. режим тормоза.
Уменьшение мощности двигателя ΔР при постоянном моменте происходит за счёт изменения скорости и определяется потерями в добавочном сопротивлении:
![]()
КПД двигателя уменьшается с переходом на более низкую искусственную характеристику
При ХХ М
стремится к 0, а т.к. n ~ 1/ ,
то n стремится к бесконечности.
Можно сделать вывод, что ДПсВ не работает
при ХХ, он уходит в разнос.
,
то n стремится к бесконечности.
Можно сделать вывод, что ДПсВ не работает
при ХХ, он уходит в разнос.
ДПрВ |
ДПсВ |
M~Ia |
M~Ia2 |
n≈const |
n ~ 1/ |
P2=2πnM~M |
P2=2πnM~ (т.к. n ~ 1/ ) |
16. Регулирование скорости двигателя параллельного возбуждения изменением потока, введением сопротивления в цепь якоря, изменением напряжения цепи.
Двигатели постоянного тока имеют хорошие регулировочные свойства. Их скорость вращения можно изменять по-разному: вводя добавочное (регулировочное) сопротивление в цепь обмотки якоря, изменяя напряжение якорной цепи или регулируя ток возбуждения. Каждый из этих способов имеет свои преимущества и недостатки. Рассматривая переходные режимы при регулировании скорости, принимаем следующие допущения.
1. Пренебрегаем размагничивающим действием реакции якоря.
2. Тормозной статический момент считается постоянным.
3. Скорость вращения, связанная с вращающимися маховыми массами, считаем постоянной в течение времени электромагнитного переходного процесса.
Регулирование скорости двигателя параллельного возбуждения реостатом в цепи якоря

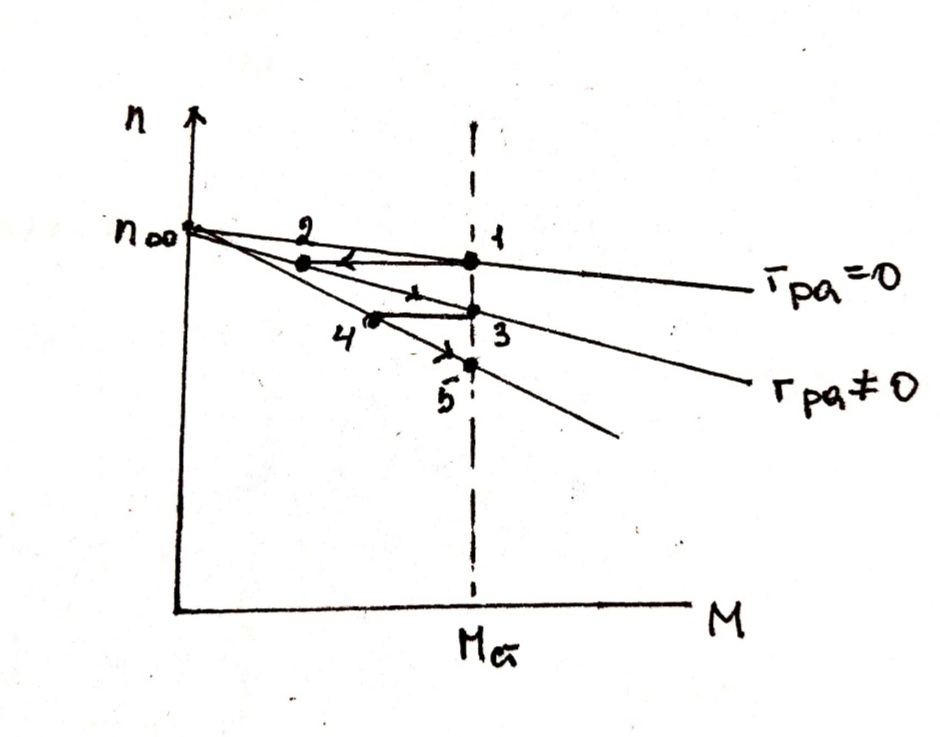 (это
rpa на
скане)
(это
rpa на
скане)
Регулирование скорости вращения двигателя параллельного (независимого) возбуждения посредством изменения тока возбуждения (магнитного потока)
При изменении тока возбуждения изменяется магнитный поток возбуждения. Связь потока с током нелинейная, если проявляется насыщение магнитной цепи машины. Это усложняет вывод формулы зависимости скорости от тока возбуждения. Определим её зависимость от магнитного потока, которая даст качественную картину связи скорости и тока возбуждения. До изменения потока, Фδ = Фδ1.
В первые моменты после уменьшения тока возбуждения и потока:
![]()
скорость не изменяется, и ток якоря быстро увеличивается до I`а:

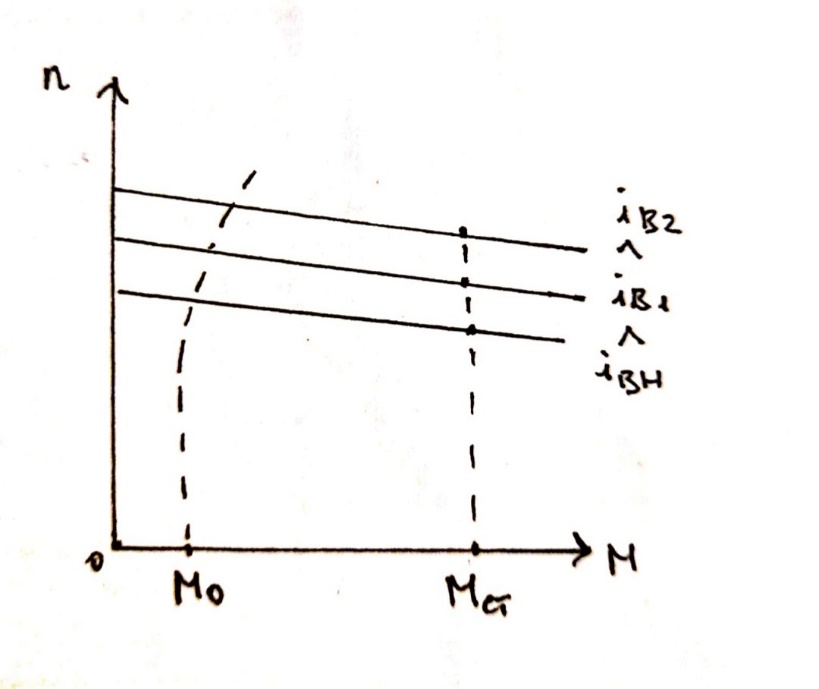
М0 не постоянен так как будут потери на больших n. (буква n в данном случае аналогична Омега).


Вообще, n ~ 1/Фδ ~ 1/iв, поэтому зависимость n(iв) гиперболическая.
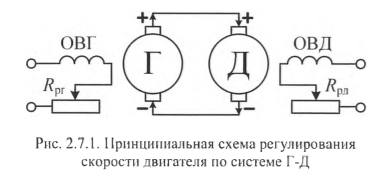
Регулирование скорости вращения двигателя параллельного возбуждения посредством изменения напряжения на якоре
Данный способ применяется для регулирования скорости вращения двигателей большой мощности в металлургии, на транспорте. (в том числе морском) и пр., где требуется глубокое регулирование скорости и поддержание её высокой точности. В ней нет силовых контакторов и реостатов в цепи якоря. Приводом генератора может быть дизель, синхронный или асинхронный электродвигатель. Регулируя ток возбуждения генератора, изменяют напряжение, подводимое к якорю двигателя. Пуск двигателя осуществляется при пониженном напряжении и максимальном потоке возбуждения.
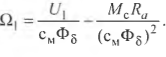
До момента изменения напряжения U = U1:
При повышении напряжения скачком (условно) до величины U2, быстро, практически, с электромагнитной постоянной времени Та, возрастает ток якоря:
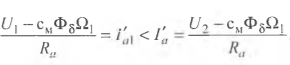
Вращающий электромагнитный момент возрастает вместе с током, и возникает положительный динамический момент Мj > 0.
Увеличение тока возбуждения приводит к снижению наклона характеристики и уменьшению напряжения трогания — рост магнитного потока компенсируется снижением пускового тока. При U < UTp двигатель может перейти в тормозной режим противовключения, если это момент активного типа. Для двигателей малой мощности, работающих в системах автоматики, способ регулирования скорости вращения изменением напряжения на якоре, непосредственно с помощью полупроводникового источника питания, широко применяется благодаря линейной зависимости скорости вращения.