12. Угловые характеристики мощности см. Понятие о статической устойчивости.
Угловыми характеристиками мощности называются зависимости электромагнитной мощности от угла нагрузки θ при постоянном напряжении сети Uc и ЭДС Е, индуктированной в обмотке статора потоком возбуждения.
Pэ=f(θ), Q=f(θ) при Uс=const, Eaf =const.
Характеристики активной мощности
Пренебрежём активным сопротивлением якоря и потерями в статоре (тогда маленький вектор raI должен отсутствовать). При этом активная мощность P2 СМ численно равна электромагнитной.
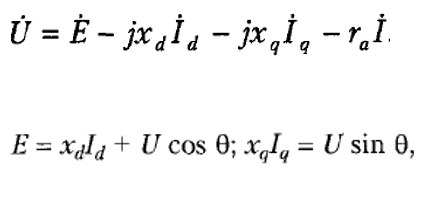
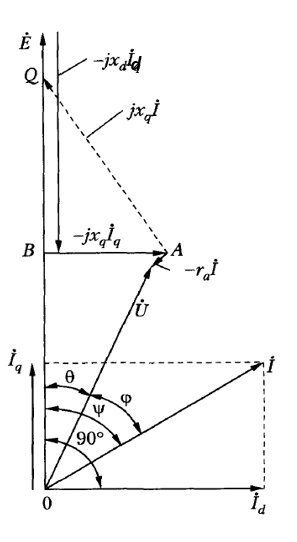

Учтём, что
![]() .
Тогда для активной мощности СМ
.
Тогда для активной мощности СМ

Учтя выражения для продольного и поперечного токов получим

Здесь 2 слагаемых (это важно для рассмотрения графика).
Пусть СМ работает с сетью бесконечной
мощности (U, f
= const) и ток возбуждения
не меняется (Eaf
=const). И ещё
![]() .
.
Тогда P=f(θ) [и только от угла, всё остальное постоянное]
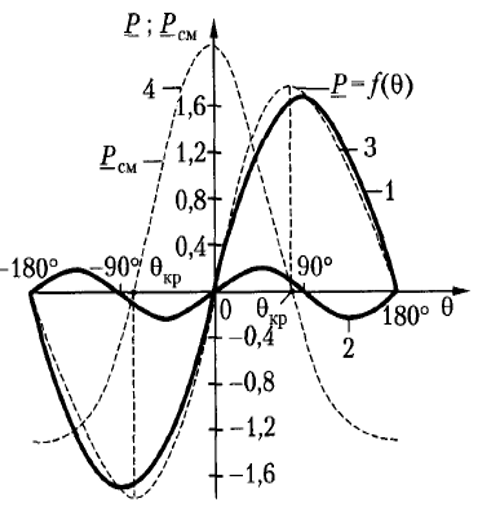
 ,
,
Потому что в двигательной режиме мощность потребляется, в генераторном вырабатывается. Режим абсолютно симметричны.
1ая кривая (сплошная) это 1ое слагаемое. 2ая кривая (тоже сплошная) это 2ое слагаемое (где синус двойного угла). Если сложим, то получим 3ю кривую, она и есть наша угловая хар-ка явнополюсной СМ. 4ая кривая – это коэффициент синхронизирующей мощности (подробнее в следующем вопросе).
Угол, при котором достигается максимум, называется θкр критическим углом нагрузки.
Поскольку электромагнитный момент
равен отношению электромагнитной
мощности к постоянной угловой скорости
вращения магнитного поля
 ,
то угловая характеристика момента имеет
такой же вид.
,
то угловая характеристика момента имеет
такой же вид.
Неявнополюсная машина
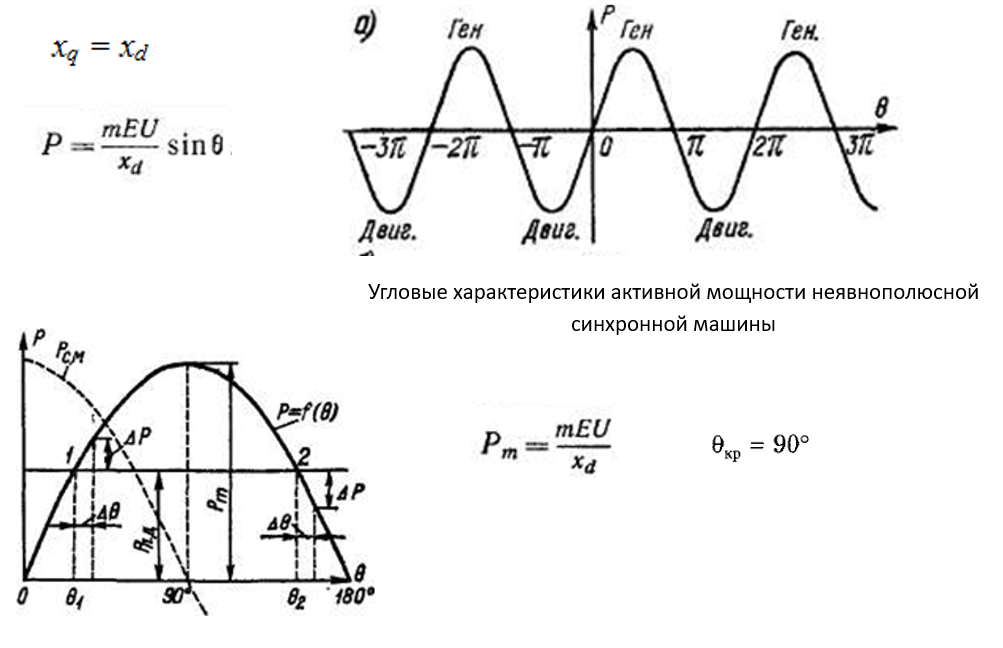
В неявнополюсной СМ xd=xq и тогда второго слагаемого не будет.
Область устойчивой работы
Устойчивость в малом (статическая устойчивость )
Работа синхронной машины называется статически устойчивой, если малые возмущения приводят к малому изменению режима работы.
Виды возмущений:
Изменение механического момента приводного двигателя или механизма.
Изменение электромагнитного момента самой синхронной машины (изменение тока возбуждения).
Любые возмущения приводят к возникновению переходного режима
Малым временем протекания электромагнитных переходных процессов пренебрегаем, считая возникающий процесс электромеханическим или квазиустановившимся, когда при изменении угла нагрузки, ток якоря и момент мгновенно достигают установившихся значений, соответствующих данному углу.
Pп.д.
– мощность, развиваемая первичным
двигателем 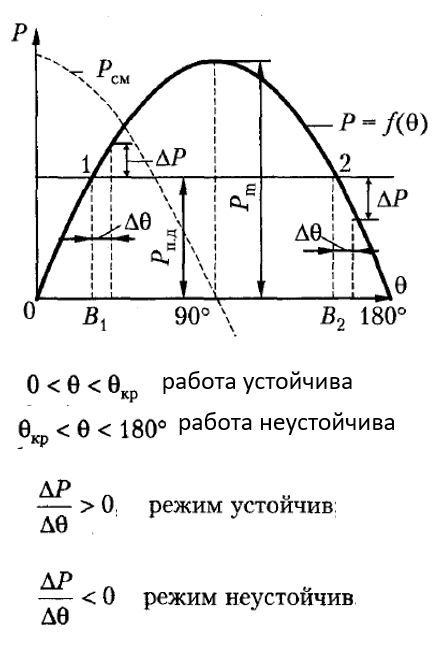
Работа неявнополюсного генератора устойчива в области О < θ < 90° и неустойчива в области 90° < θ < 180°.
Неявнополюсный синхронный двигатель
работает устойчиво при
![]()
Установившийся режим работы в точках 1 и 2. Где момент электромагнитный равен моменту на валу.
Рассмотрим точку 1. Увеличим как-то угол. Мощность электромагнитная станет больше мощности первичного двигателя. Так как электромагнитный момент тормозящий (режим генератора), то у нас будет тормозящий динамический момент, который замедлит машину. Машина вернётся в точку 1. Аналогично в противном случае, машина будет ускоряться, если мы изменим угол нагрузки в меньшую сторону. Режим устойчивый в точке 1.
Рассмотрим точку 2. Уменьшим как-то угол. Мощность электромагнитная станет больше мощности первичного двигателя. Так как электромагнитный момент тормозящий (режим генератора), то у нас будет тормозящий динамический момент, который замедлит машину. Машина не вернётся в точку 2, она перейдёт в точку 1. Аналогично в противном случае, машина будет ускоряться, если мы изменим угол нагрузки в большую сторону. И в лучшем случае машина, совершив одно колебание, вернётся в точку 1. В таком случае ротор повернётся на одно полюсное деление. В худшем машина выйдет из синхронизма. Режим неустойчивый в точке 2.
Случай невозбуждённой явнополюсной машины

У невозбуждённой явнополюсной машины электромагнитный момент развивается исключительно вследствие действия поля реакции якоря при наличии неравномерности воздушного зазора (Xd ≠ Xq) и называется поэтому р е а к т и в н ы м.
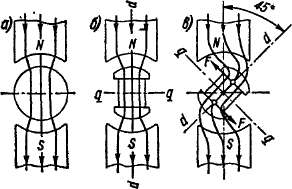
а) неявнополюсная машина, зазор везде одинаковый, xd=xq и ротор не вращается.
б) явнополюсная машина, мы момент не прикладываем и ротор ориентирован по магнитному полю, ротор стремится принять положение, при котором сопротивление магнитному потоку будет минимальным.
в) явнополюсная машина, прикладываем внешний момент, сдвинем его, получили угол тета. Поток реакции якоря стремится развернуть ротор обратно (появляются силы), появляется электромагнитный момент, а значит и появляется активная мощность. Этот момент и называется реактивным моментом (так как возникает под действием поля реакции якоря).
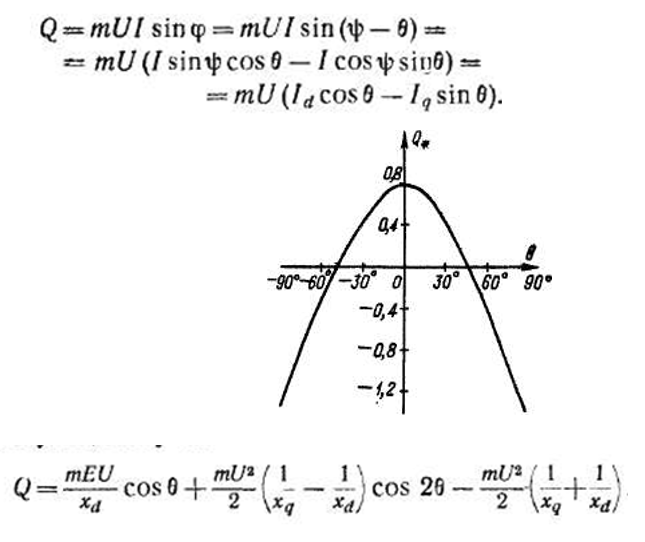
Угловая характеристика реактивной мощности: