

10. Изменение реактивной мощности. Режим синхронного компенсатора.

Используем
ту же формулу для тока, что и в предыдущем
вопросе (на рисунке формула 1). Представим
себе, что методом точной синхронизации
мы подключили наш генератор в сеть, т.е.
ЭДС генератора равно напряжению сети,
будем обозначать её
(формула 2 на рисунке). Если напряжение
генератора равно напряжению сети, то
равна нулю и никакого тока в обмотке
якоря не будет. Как сделать так, чтобы
появился ток? Увеличим ток возбуждения
генератора, при этом величина ЭДС
увеличится, поэтому мы получим такую
векторную диаграмму (на рисунке диаграмма
слева). ЭДС стало больше напряжения
сети, при этом напряжение сети не
меняется, т.к. у нас сеть бесконечной
мощности. Таким образом, появилась
и, соответственно, ток. Этот ток будет
чисто индуктивным (по отношению к
генератору), который направлен под 90
градусов и отстаёт от ЭДС. Угол
 ,
а угол нагрузки (угол между векторами
ЭДС и напряжения)
,
а угол нагрузки (угол между векторами
ЭДС и напряжения)
 .
Такой режим называется режимом
перевозбуждения и ток в обмотке якоря
будет индуктивным по отношению к
генератору и ёмкостным по отношению к
сети. Такой режим даёт в сеть ток. СГ
вырабатывает реактивную мощность и
отдаёт её в сеть.
.
Такой режим называется режимом
перевозбуждения и ток в обмотке якоря
будет индуктивным по отношению к
генератору и ёмкостным по отношению к
сети. Такой режим даёт в сеть ток. СГ
вырабатывает реактивную мощность и
отдаёт её в сеть.
Если мы
уменьшим значение ЭДС по отношению к
его начальному значению, т.е. уменьшим
ток возбуждения, то мы получим следующую
векторную диаграмму (на рисунке справа).
ЭДС стало меньше напряжения, значит
появилась
,
направленная в другую сторону по
отношению к вектору
.
Ток, который при этом возникает, теперь
опережает ЭДС и напряжение. Этот ток
емкостной по отношению к генератору и
индуктивный по отношению к сети. Такой
режим называется режимом недовозбуждения.
Таким образом, потребляет реактивную
мощность из сети. Т.е. меняя ток возбуждения,
можно менять величину ЭДС генератора,
а это при постоянстве напряжения сети
приводит к изменению только реактивной
мощности СМ и реактивного тока. Такая
СМ, не несущая активной нагрузки и
загруженная только реактивным током,
называется синхронным компенсатором.
Синхронные компенсаторы применяются
для повышения cos
 сети в системе для того, чтобы
поддержать нормальный уровень напряжения
в сетях.
сети в системе для того, чтобы
поддержать нормальный уровень напряжения
в сетях.
11. Изменение активной мощности. Режим генератора и двигателя.
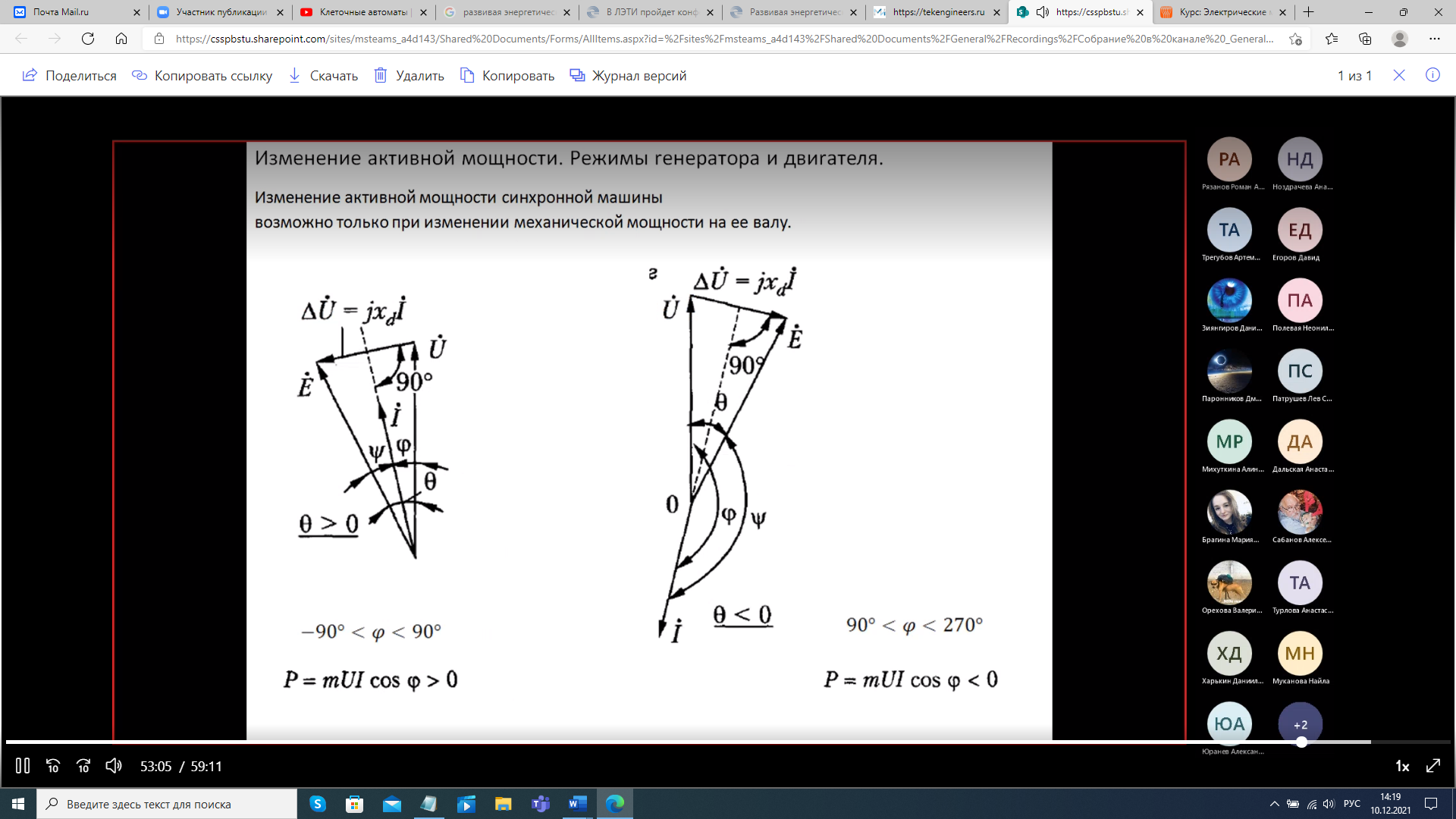
Как сделать так, чтобы СМ вырабатывала или потребляла активную мощность (т.е. чтобы машина работала в режиме генератора или двигателя). Для того чтобы это сделать, нужно изменить активную мощность СМ. Изменение активной мощность СМ возможно только при изменении механической мощности на её валу.
Рассмотрим
первый случай. Для того чтобы СМ,
включенная на параллельную работу,
приняла на себя активную нагрузку и
работала в режиме генератора, увеличиваем
механический вращающий момент приводного
механизма (первичного двигателя, который
вращает ротор генератора). Если мы
увеличим вращающий момент, то увеличится
скорость ротора СМ. Ротор и ЭДС как бы
забегут вперёд по отношению к напряжению,
ротор начинает вращаться быстрее. Между
вектором ЭДС, который направлен по оси
q и связана с осью d,
ось q и ось d
забегут вперёд. Т.к. ЭДС забежала вперёд
по отношению к напряжению (т.е. ЭДС
опережает напряжение), то у нас появилась
(на рисунке диаграмма слева). Даже если
по модулю ЭДС и напряжение равны, то
только из-за появления угла нагрузки
 у нас появится
и, следовательно, появится ток. Ток будет
направлен так, как изображено на
диаграмме. Видно, что появился угол
,
и этот угол отрицательный, т.е. ток можно
разложить на активную и реактивную
составляющие. Активная составляющая
тока совпадает по направлению с
напряжением, т.е. наша СМ отдаёт в сеть
активный ток. Реактивная составляющая
тока – емкостная, т.е. машина потребляет
из сети реактивный ток. Получился случай
недовозбуждения. Т.е. если, имея ЭДС,
равную напряжению (по модулю), увеличиваем
момент на валу, мы получим СГ в режиме
недовозбуждения. Почему? Потому что как
только появилась реакция якоря (как
только появился ток в якоре), реакция
якоря размагничивающая и она уменьшила
поток. Для того чтобы перевести генератор
в режим перевозбуждения, необходимо
увеличить ЭДС. Тогда вектор
повернется и, соответственно, повернется
вектор тока, и мы получим ток, который
будет отдавать в сеть и активную, и
реактивную мощности. Т.е. угол
в режиме генератора будет меняться от
-90 до 90 градусов. При этом мощность
у нас появится
и, следовательно, появится ток. Ток будет
направлен так, как изображено на
диаграмме. Видно, что появился угол
,
и этот угол отрицательный, т.е. ток можно
разложить на активную и реактивную
составляющие. Активная составляющая
тока совпадает по направлению с
напряжением, т.е. наша СМ отдаёт в сеть
активный ток. Реактивная составляющая
тока – емкостная, т.е. машина потребляет
из сети реактивный ток. Получился случай
недовозбуждения. Т.е. если, имея ЭДС,
равную напряжению (по модулю), увеличиваем
момент на валу, мы получим СГ в режиме
недовозбуждения. Почему? Потому что как
только появилась реакция якоря (как
только появился ток в якоре), реакция
якоря размагничивающая и она уменьшила
поток. Для того чтобы перевести генератор
в режим перевозбуждения, необходимо
увеличить ЭДС. Тогда вектор
повернется и, соответственно, повернется
вектор тока, и мы получим ток, который
будет отдавать в сеть и активную, и
реактивную мощности. Т.е. угол
в режиме генератора будет меняться от
-90 до 90 градусов. При этом мощность
 .
Т.к. активная мощность больше нуля, это
означает, что машина отдаёт в сеть
активную мощность.
.
Т.к. активная мощность больше нуля, это
означает, что машина отдаёт в сеть
активную мощность.
Как только мы увеличили момент на валу и появился активный ток и активная мощность, появился электромагнитный момент, который в режиме генератора является тормозящим (он будет препятствовать нарастанию момента на валу). С ростом угла нагрузки электромагнитный момент увеличивается и в какой-то момент этот электромагнитный момент по величине будет равен моменту на валу, который мы приложили к валу (т.е. момент приводного механизма). В точке равенства этих моментов ротор не будет дальше увеличивать скорость, угол останется постоянным.
Чтобы
перевести машину в двигательный режим
после подключения её методом точной
синхронизации к сети, мы должны
притормозить ротор, поэтому вектор ЭДС
отстанет от вектора напряжения (диаграмма
справа на рисунке). Снова появится
,
но теперь этот вектор направлен в другую
сторону по сравнению с тем же вектором
в режиме генератора. Возникающий ток
также будет направлен противоположно
току из режима генератора. Активная
составляющая тока теперь направлена в
сторону, обратную направлению вектора
напряжения, значит ток потребляется из
сети (это режим двигателя). Также будет
реактивная составляющая тока, и она
такова, что реактивный ток тоже
потребляется из сети (это режим
недовозбуждения). Если в двигательном
режиме мы хотим перейти в режим
перевозбуждения, то мы должно увеличить
ток возбуждения, т.е. увеличить величину
ЭДС. Тогда вектор ΔU
повернётся и вектор I
развернётся, т.е. реактивная составляющая
тока будет отдаваться в сеть. Т.е. в таком
случае активная мощность будет
потребляться двигателем из сети, а
реактивная – отдаваться в сеть. Угол
 в двигательном режиме. Активная мощность
в двигательном режиме. Активная мощность
 .
То, что она меньше нуля, говорит о том,
что СМ потребляет активную мощность из
сети, т.е. является двигателем.
.
То, что она меньше нуля, говорит о том,
что СМ потребляет активную мощность из
сети, т.е. является двигателем.
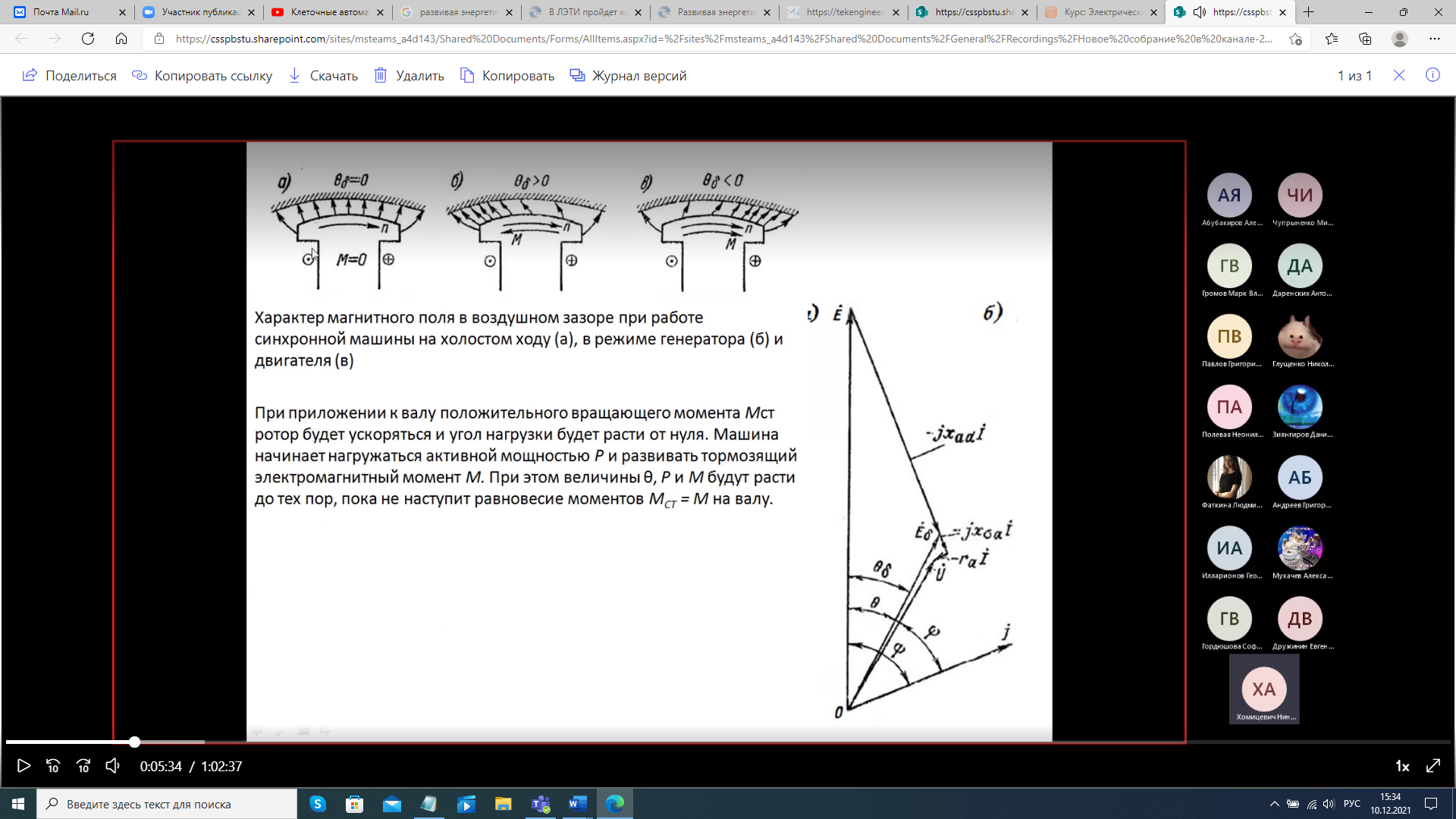
Можно рассмотреть картины магнитного поля в случае ХХ, генераторного и двигательного режимов (на рисунке а, б и в соответственно).
а). В случае
ХХ (когда нет тока в якоре) поле
симметрично, продольная ось d
совпадает с осью потока, внутренний
угол нагрузки
 (это угол между ЭДС
и результирующей ЭДС
(см. диаграмму на рисунке). ЭДС
создаётся основным магнитным потоком,
созданным током возбуждения, а
результирующая ЭДС
определяется результирующим потоком,
т.е. когда на основной поток накладывается
реакция якоря. Этот же угол
(это угол между ЭДС
и результирующей ЭДС
(см. диаграмму на рисунке). ЭДС
создаётся основным магнитным потоком,
созданным током возбуждения, а
результирующая ЭДС
определяется результирующим потоком,
т.е. когда на основной поток накладывается
реакция якоря. Этот же угол
 будет между основным потоком, который
направлен под 90 градусов по отношению
к ЭДС
,
и результирующим потоком, который
создает результирующую ЭДС
.
будет между основным потоком, который
направлен под 90 градусов по отношению
к ЭДС
,
и результирующим потоком, который
создает результирующую ЭДС
.
б). Если
рассматриваем режим генератора, то
в обмотке якоря есть ток, есть поток
реакции якоря и суммарный поток уже
перераспределяется таким образом, как
показано на рисунке (случай б). Продольная
ось смещается вправо относительно оси
потока по направлению вращения.
 .
.
в). В случае
двигательного режима поток распределён
так, как показано на рисунке. Продольная
ось смещается влево (в противоположную
сторону от направления вращения).
 .
.
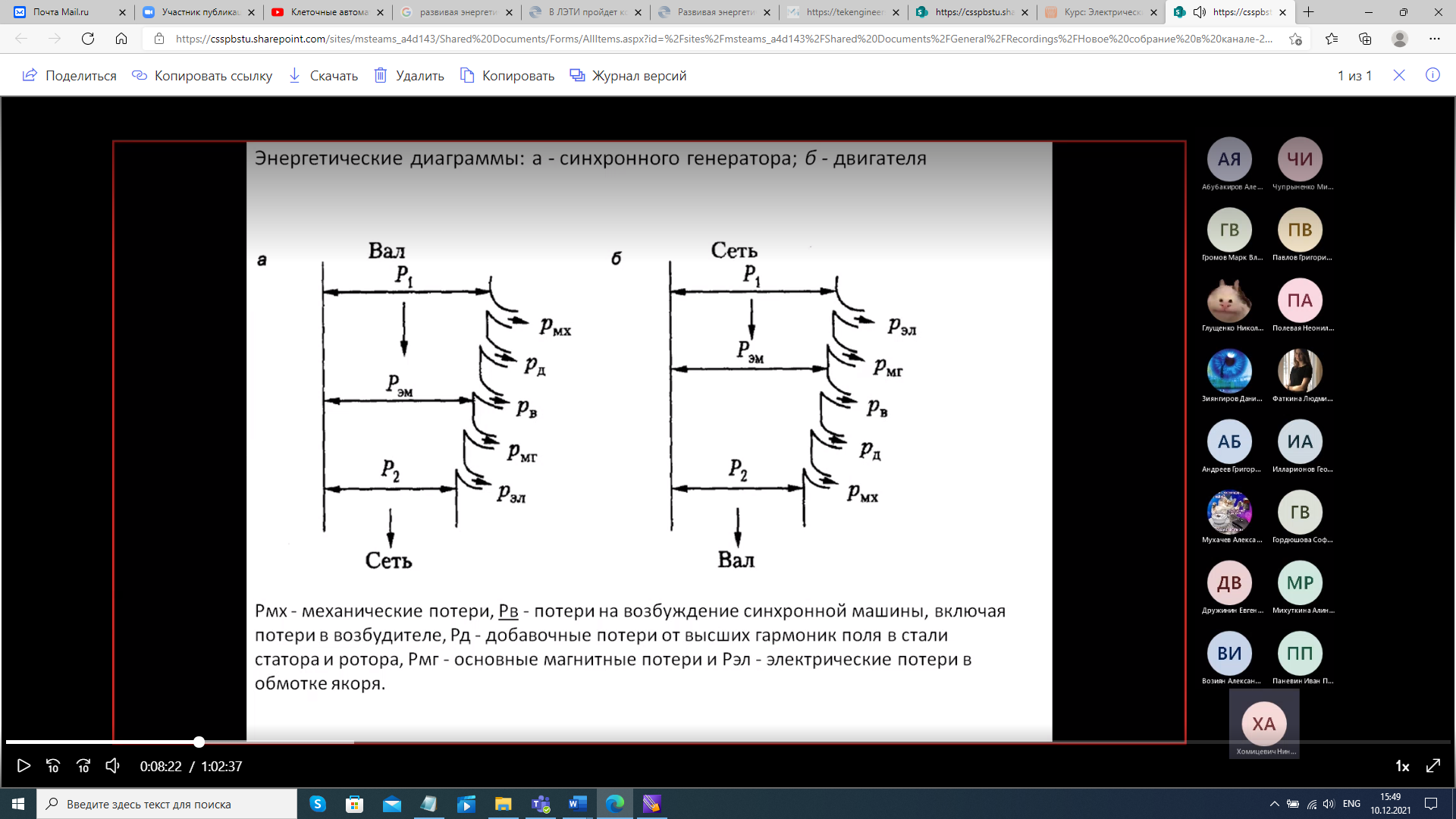
Энергетические диаграммы для синхронного генератора и двигателя. Будем считать, что СМ с возбудителем на валу, т.е. возбудитель, который питает обмотку возбуждения, находится на том же самом валу, что и ротор. Поэтому часть мощности, которая прикладывается к валу в режиме генератора или потребляется из сети в режиме двигателя, расходуется на возбуждение.
Если это генератор, то потребляемая мощность Р1 механическая. Она частично расходуется на механические потери, связанные с трением. Есть ещё потери добавочные (потери от высших гармоник поля в стали статора и ротора) и потери на возбуждение (представлены на рисунке). За вычетом этих потерь остаётся электромагнитная мощность Рэм, которая с ротора передаётся на статор посредством поля. Часть электромагнитной мощности теряется в виде магнитных потерь (потери на перемагничивание в статоре и вихревые токи) и в виде электрических потерь (потерь в обмотке статора). Все, что остаётся, это полезная мощность Р2, которая отдаётся в сеть.
Если у нас двигатель. Подаём на обмотку статора электрическая мощность Р1. Часть этой мощности теряется в виде электрических и магнитных потерь (указано на рисунке). Остаётся электромагнитная мощность Рэм, которая остаётся за вычетом потерь на возбуждение, добавочных потерь и механических потерь, превращается в полезную механическую мощность Р2 на валу. КПД = Р2/Р1.