

7. Внешняя, регулировочная и нагрузочная характеристики сг. Треугольник Потье.
В симметричном установившемся режиме работы частота тока не изменяется. Основные переменные, характеризующие работу СГ, — напряжение, ток статора и ток возбуждения. Его характеристиками являются зависимости между двумя из этих переменных при постоянной третьей и неизменном угле φ, (cosφ = const):
1. Внешняя характеристика U=f(Ia), при iв=const
2. Регулировочная характеристика iв=f(I), при U=const
3. Нагрузочная характеристика U=f(iв), при I=const
Внешняя характеристика СГ U=f(Ia), iв=const, cos φ=const, f=const
Внешние характеристики U=f(Ia), при iв=const, cosφ=const образуют семейство характеристик, отличающихся током iв и характером нагрузки.
На рис. a представлены три внешних характеристики, снятые при токе возбуждения iв0 и нагрузках R-L, R, R-C.
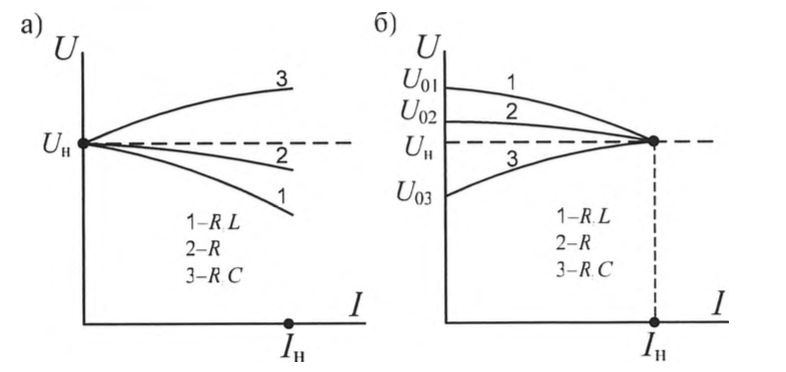
1- активно-индуктивная нагрузка (cos φ>0)
2 - активная нагрузка (cos φ=1)
3 - активно-емкостная нагрузка (cos φ<0)
Все кривые выходят из точки холостого хода с напряжением U = UH. При активно-индуктивной нагрузке напряжение уменьшается с ростом тока вследствие действия продольной размагничивающей реакции якоря, а при активно-емкостной нагрузке напряжение возрастает из-за увеличения продольной намагничивающей реакции якоря. При чисто активной нагрузке R угол φ = 0, но напряжение отстаёт по фазе от ЭДС Eaf на угол θ, что является причиной существования тока Id и небольшой размагничивающей реакции якоря. Данные характеристики не проходят через номинальную точку (Uн, Iн). Чтобы каждая кривая проходила через эту точку, токи возбуждения должны быть разными — в каждом случае свой номинальный ток возбуждения: iвн>iв0 для нагрузки R, R-L и iвн<iв0 для нагрузки R-C, рис. б. Тогда при холостом ходе напряжения U0 будут разными.
Изменением напряжения называется относительная величина разности напряжения в номинальной точке и при холостом ходе:
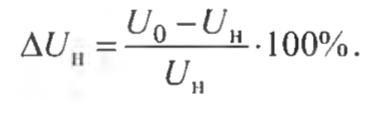
Обычно ΔUн =25-35% и у турбогенераторов, имеющих большее xd , оно выше, чем у гидрогенераторов с меньшим значением xd.

Регулировочная характеристика СГ iв=f(I), U=const, cosφ=const, f=fн=const
Регулировочные характеристики — зависимости iв=f(I) при U=const=Uн и разных характерах нагрузки представлены на рис.
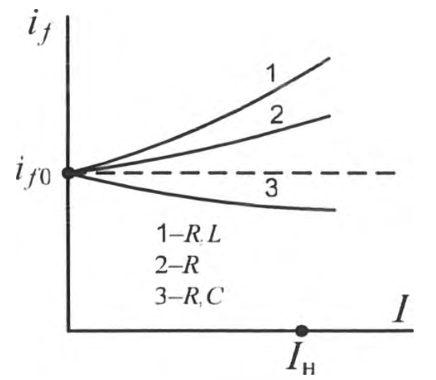
1- активно-индуктивная нагрузка (cos φ>0)
2 - активная нагрузка (cos φ=1)
3 - активно-емкостная нагрузка (cos φ<0)
При холостом ходе ток возбуждения iв=iв0 и создаёт напряжение Uн и требует увеличения для компенсации продольной размагничивающей реакции якоря при активно-индуктивной нагрузке и уменьшения в случае намагничивающей реакции якоря при активно-емкостной нагрузке.

Чем выше
 ,
тем выше реакция якоря, тем на больший
диапазон регулирования нужно будет
изменять ток якоря.
,
тем выше реакция якоря, тем на больший
диапазон регулирования нужно будет
изменять ток якоря.

Нагрузочная характеристика U=f(iв), I=const, cosφ=const
Нагрузочные характеристики U=f(iв), I=const, cosφ=const также образуют семейство. В нем представляет интерес нагрузочная индукционная характеристика при cosφ=0 (L) и I=const=Iн. МДС возбуждения и якоря или токи iв и Id’=kidId постоянны и складываются алгебраически (вычитаются), а постоянные Uн и xσaI - арифметически-векторная диаграмма представлена на рис.а.
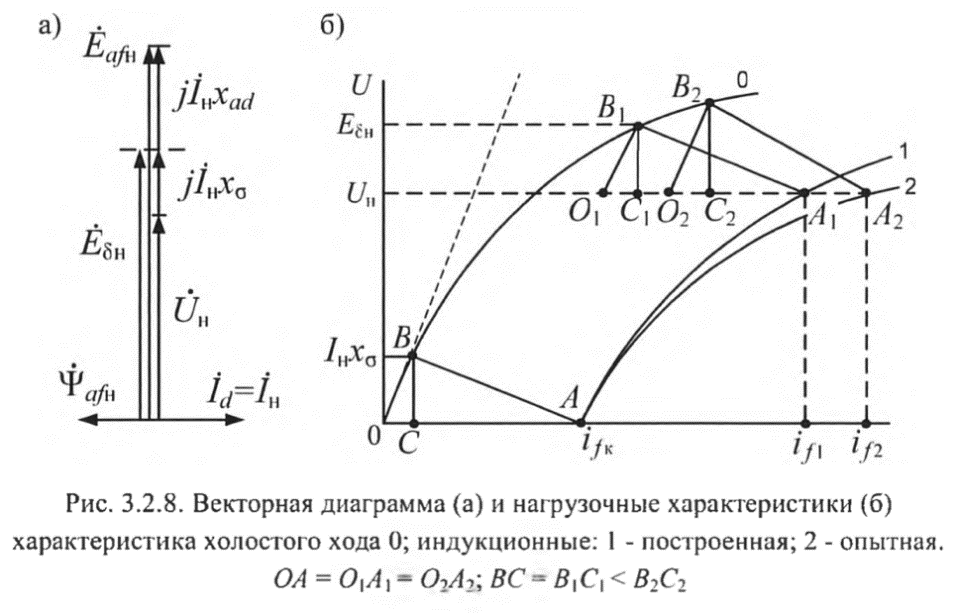
Треугольник Потье -
Индукционная характеристика по виду напоминает характеристику холостого хода, но из-за продольной размагничивающей реакции якоря она проходит ниже, рис. б. Точке короткого замыкания А (U = 0, I=Iн) соответствует ток ifк. В данном случае поток в зазоре, индуктирующий ЭДС Eδ=xσaI, продольный Фδ=Фδd. Характеристику холостого хода можно рассматривать как зависимость ЭДС Eδ, от результирующей МДС Fδ=Ff-Fad’ или тока iδ=if-Id’, создающих этот поток. Величины ЭДС и токов при коротком замыкании представляются на рис. б отрезками: Eδ=xσaI=BC, iδ=OC, Id’=CA. По условиям снятия индукционной характеристики стороны характеристического треугольника СВА и треугольников ОBА, ОВС должны быть неизменными. Тогда, если известно сопротивление xσa и характеристики XX и КЗ, то индукционную характеристику можно не снимать, а построить.
При перемещении треугольника АВС параллельно самому себе- так, чтобы точка В оставалась на XXX, его вершина А опишет индукционную нагрузочную характеристику, линия 1 на рис. б.
Если же сопротивление рассеяния xσa не известно, но есть опытная индукционная характеристика, считающаяся совпадающей с характеристикой, построенной указанным способом, то по этим данным можно найти сопротивление рассеяния. Для этого, например, от точки А1, соответствующей номинальному напряжению, надо отложить отрезок A1O1 = АО и через точку О1 параллельно начальной части характеристики холостого хода провести луч О1В1 до пересечения с XXX. в точке В1. По длине перпендикуляра В1С1 находится величина xσa.
Однако
опытная индукционная характеристика
не совпадает с характеристикой,
построенной перемещением характеристического
треугольника, а отклоняется от нее
вправо, кривая 2 на рис. б, по
следующей причине. С ростом if
увеличиваются насыщение полюсов
и их магнитное сопротивление, что требует
дополнительного увеличения МДС
Ff.
Тогда исходной точкой для
построения треугольника будет не
точка А1, а точка
А2. Треугольник
 А2В2O2
расположится правее
А1В1O1,
а его высота увеличится. В результате
получим:
А2В2O2
расположится правее
А1В1O1,
а его высота увеличится. В результате
получим:
параметр хр называется индуктивным сопротивлением Потье или расчётным индуктивным сопротивлением рассеяния обмотки якоря:
хр = (1,05-1,10)xσa у неявнополюсных СМ и
хр=(1,10-1,30)xσa у явнополюсных СМ.
Иногда использование в расчётах хр вместо xσa даёт лучшее совпадение результатов расчёта и опыта.