

16. Асинхронные короткозамкнутые двигатели с улучшенными пусковыми характеристиками. Глубокопазные двигатели.
Для получения АД с повышенным пусковым моментом и крутой характеристикой в области малых скольжений параметры двигателя должны быть переменными.
Основное влияние на механическую характеристику Мэ(s) оказывает активное сопротивление ротора. Желательно, чтобы при малом скольжении оно было не большим и увеличивалось бы с ростом скольжения. Этого можно достичь, используя эффект вытеснения тока, который проявляется в машине с достаточно узкими и глубокими пазами на роторе, а также в двигателе с двойной беличьей клеткой.
Для улучшения пусковых характеристик (сделать такой АД с короткозамкнутым ротором [КЗ ротор], у которого при пуске сопротивление будет большим, а при работе в номинальном режиме – небольшим) существует специальный тип двигателей: глубокопазный двигатель и двигатель с двойной « беличьей клеткой».
Глубокопазные двигатели.
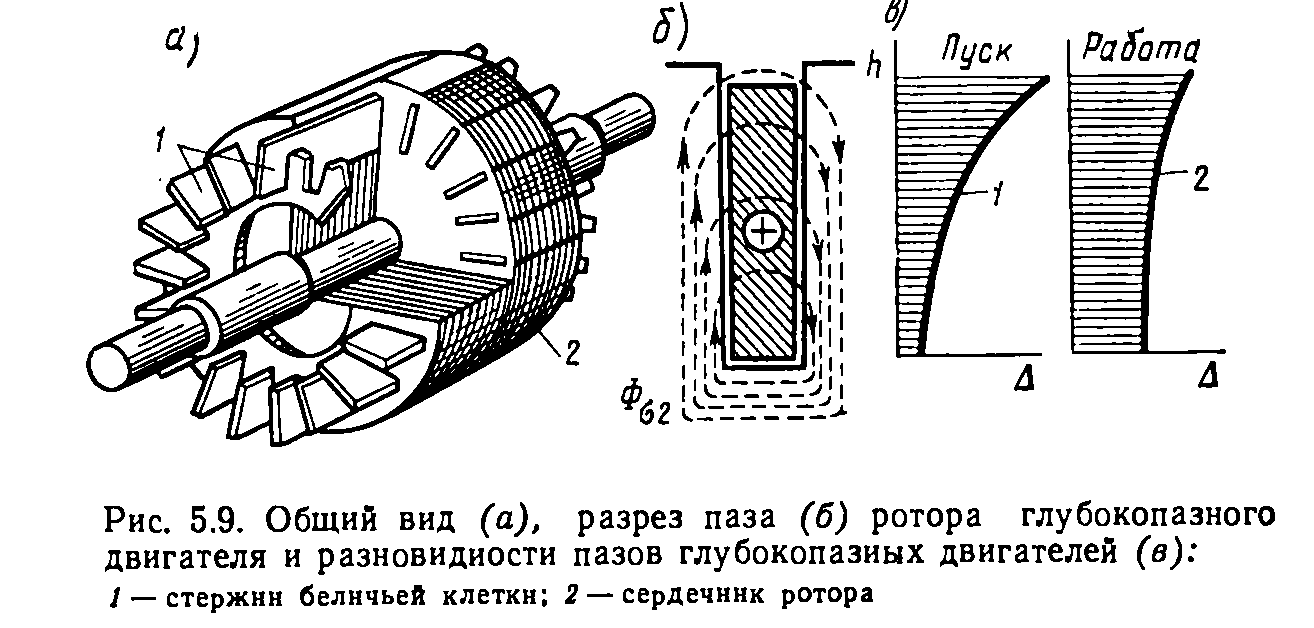
(Комментарий к 5.9. в) \: 1,2 – плотность тока. Происходит за счёт замыкания магнитного потокосцепления. Концентрация потоков внизу намного больше, чем вверху)
Проводящий стержень углублён в ферромагнитном материале. При достаточной частоте тока проявляется поверхностный эффект (или эффект вытеснения тока к верхней части стержня). В установившемся режиме этого эффекта не будет (частота будет маленькой).
При пуске для увеличения МП (магнитного потока) сопротивление должно быть велико. В КЗ роторе ничего сделать нельзя, следовательно, КЗ ротор при пуске имеет небольшой МП. Может запускаться или при ХХ, или при небольшой нагрузке на валу.
Ψ2


В глубокопазных АД паз ротора и стержень клетки узкие, но высокие, рис. 2.5.3.
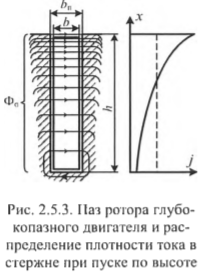
Все магнитные
линии потока пазового рассеяния проходят
под дном паза, где магнитная проницаемость
стали значительно выше магнитной
проницаемости материала, находящегося
в пазу, и близкой к
 .
Поэтому потокосцепление нижней части
стержня, её индуктивность и сопротивление
выше, чем у части, расположенной ближе
к воздушному зазору. Распределение
плотности тока по высоте стержня
становится не одинаковым, и это различие
увеличивается с ростом частоты тока в
роторе. Так проявляется поверхностный
эффект у проводника, утопленного в
ферромагнитную среду — ток вытесняется
в сторону среды с малой магнитной
проницаемостью. Поскольку большая часть
тока проходит через меньшую площадь,
то величина активного сопротивления
возрастает. В лобовых частях (кольцах),
расположенных в воздухе, эффект вытеснения
тока при промышленной частоте, практически,
не проявляется. Поэтому активное
сопротивление и индуктивное сопротивление
рассеяния короткозамкнутого ротора
можно представить в виде сумм постоянной
и переменной составляющих, соответствующих
лобовой и пазовой части:
.
Поэтому потокосцепление нижней части
стержня, её индуктивность и сопротивление
выше, чем у части, расположенной ближе
к воздушному зазору. Распределение
плотности тока по высоте стержня
становится не одинаковым, и это различие
увеличивается с ростом частоты тока в
роторе. Так проявляется поверхностный
эффект у проводника, утопленного в
ферромагнитную среду — ток вытесняется
в сторону среды с малой магнитной
проницаемостью. Поскольку большая часть
тока проходит через меньшую площадь,
то величина активного сопротивления
возрастает. В лобовых частях (кольцах),
расположенных в воздухе, эффект вытеснения
тока при промышленной частоте, практически,
не проявляется. Поэтому активное
сопротивление и индуктивное сопротивление
рассеяния короткозамкнутого ротора
можно представить в виде сумм постоянной
и переменной составляющих, соответствующих
лобовой и пазовой части:





 -
эквивалентная глубина проникновения
тока при поверхностном эффекте
-
эквивалентная глубина проникновения
тока при поверхностном эффекте

Тогда :
 ,где
,где
b/bп – ширина стержня/ паза
h- высота стержня
Если s=1,
то

При

![]()
Если h = 5 см
и f1 = 50 Гц то во время пуска (s = 1) r2
будет в 5 раз больше (kr
= 5), а
 будет в 3,33 раза меньше (kx
= 0,3).
будет в 3,33 раза меньше (kx
= 0,3).
Здесь пазовые сопротивления соответствуют равномерному, без вытеснения, распределению тока по высоте стержня, а кr и кx — коэффициенты увеличения сопротивлений из-за вытеснения тока. В пазовое рассеяние можно включить также рассеяние скоса и дифференциальное.
Наиболее резко эффект вытеснения тока у глубокопазных АД проявляется при пуске, что ведёт к повышению расчётного критического скольжения и реального пускового момента. По мере разгона уменьшается частота тока в роторе, распределение плотности тока по высоте стержня становится все более равномерным и двигатель переходит на «другие» механические характеристики с меньшим критическим скольжением. В области номинального скольжения эффект вытеснения тока не проявляется, сопротивление ротора становится минимальным, а крутизна механической характеристики в этой зоне наибольшей. Обычно у глубокопазных двигателей kп =1,0 — 1,4, а kпi= 4,5 – 6,0.