

11. Пуск ад с фазным ротором. Пуск с помощью пускового реостата.
Двигатели с фазным ротором применяются значительно реже короткозамкнутых. Они используются в следующих случаях:
Когда короткозамкнутые двигатели неприемлемы по условиям регулирования их частоты вращения;
Когда статический момент сопротивления на вале при пуске
 велик, и поэтому короткозамкнутый АД
с пуском при пониженном напряжении
неприемлем, а прямой пуск такого
двигателя недопустим по условиям
воздействия больших пусковых токов на
сеть;
велик, и поэтому короткозамкнутый АД
с пуском при пониженном напряжении
неприемлем, а прямой пуск такого
двигателя недопустим по условиям
воздействия больших пусковых токов на
сеть;Когда приводимые в движение массы настолько велики, что выделяемая во вторичной цепи двигателя тепловая энергия вызывает недопустимый нагрев обмотки ротора короткозамкнутого двигателя.
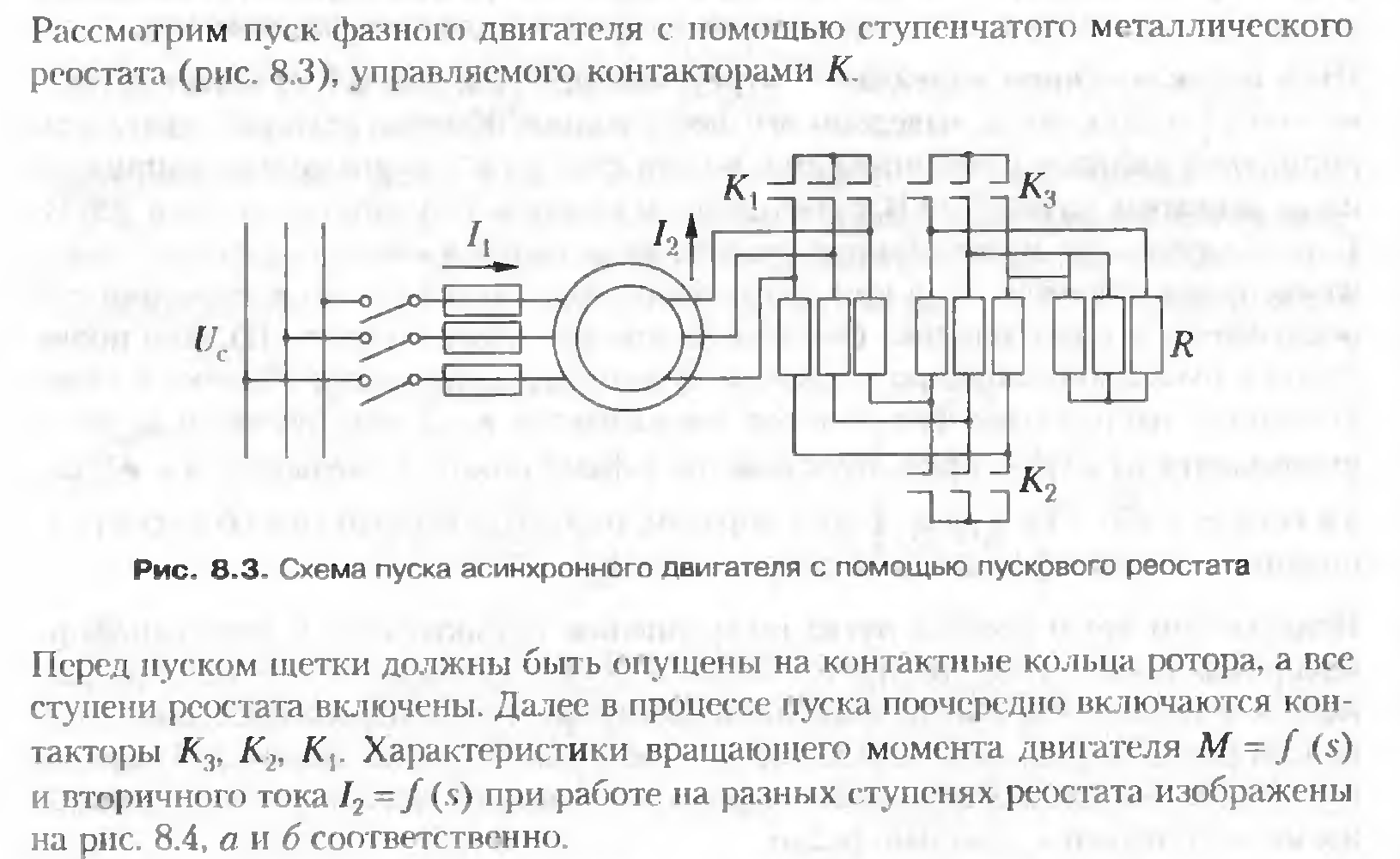
 Схема
пуска асинхронного двигателя с помощью
пускового реостата. Перед пуском щётки
должны быть опущены на контактные кольца
ротора, а все ступени реостата включены.
Далее в процессе пуска поочередно
включаются контакторы К3, К2, К1.
Характеристики вращающегося момента
М=f(s) и
вторичного тока
Схема
пуска асинхронного двигателя с помощью
пускового реостата. Перед пуском щётки
должны быть опущены на контактные кольца
ротора, а все ступени реостата включены.
Далее в процессе пуска поочередно
включаются контакторы К3, К2, К1.
Характеристики вращающегося момента
М=f(s) и
вторичного тока
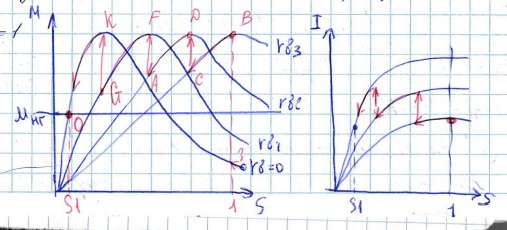
 при работе на разных ступенях реостата
изображены на рисунке.
при работе на разных ступенях реостата
изображены на рисунке.
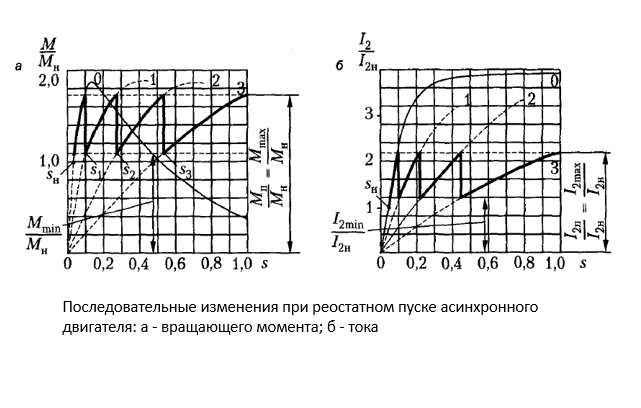
Пусковые характеристики АД при реостатном пуске наиболее благоприятны, так как высокие значения моментов достигаются при невысоких значениях пусковых токов.
12. Регулирование частоты вращения короткозамкнутого ад. Регулирование скорости изменением первичной частоты.
Общие положения. Частота вращения ротора АД
N = n1*(1-s)
Способы регулирования частоты вращения асинхронных двигателей, согласно выражению выше, можно подразделить на два класса:
Регулирование частоты вращения первичного магнитного поля
 что достигается либо регулированием
первичной частоты
что достигается либо регулированием
первичной частоты
 либо изменением числа пар полюсов р
двигателя;
либо изменением числа пар полюсов р
двигателя;Регулирование скольжения двигателя s при n1 = const. В первом случае КПД двигателя остаётся высоким, а во втором случае КПД снижается тем больше, чем больше s, так как при этом мощность скольжения
 теряется во вторичной цепи двигателя
(мощность скольжения используется
полезно только в каскадных установках).
теряется во вторичной цепи двигателя
(мощность скольжения используется
полезно только в каскадных установках).
Способы регулирования:
Изменение частоты вращения первичного МП n1 при s = const
А) изменить f1 – первичная частота (КПД высокий)
Б) изменить число пар полюсов р
2) Изменение S при n1
= const
 теряется во вторичной цепи двигателя,
при s
теряется во вторичной цепи двигателя,
при s
А) Не знаю, что за моменты, наверно просто зависимости момента от скольжения и когда достигается максимальный момент.



Б) Включить добавочную ЭДС
В
 )
Менять напряжение
)
Менять напряжение



Регулирование скорости изменением первичной частоты.
Частота вращения асинхронного двигателя равна: n = (1-s)f1/p, откуда следует, что регулировать скорость двигателя можно тремя путями: изменяя скольжение, частоту питающего напряжения и число полюсов. Два первых пути позволяют плавно регулировать скорость, а третий — дискретно. Изменение f и р влияет на скорость поля и связано со статором, а изменение s, в основном, с ротором.
Изменение частоты питающего напряжения позволяет плавно регулировать скорость АД, однако для этого требуется специальное устройство — преобразователь частоты (ПЧ), который значительно удорожает всю установку, особенно для мощных двигателей.
Одновременно с изменением частоты ПЧ должны изменять по определенному закону величину напряжения. Если пренебречь небольшим падением напряжения в первичной цени, то

Рассмотрим два варианта регулирования частотой:
А) f1 – ↓
Если f1
– ↓, то Ф – ↑, то I0
↑ (растёт насыщение (↑ потери и
намагниченный ток)), то I1
– ↑ (по формуле pэл1 =  ),
а значит cosφ↓ и η↓
),
а значит cosφ↓ и η↓
Б) f1 – ↑, то Ф – ↓ и
1)
Недоиспользование объёма машины, 2)
Снижение максимального момента Мmax
или, если М = const, то
M Ф·I2
и, значит, I↑, и pэл1↑,
Ф·I2
и, значит, I↑, и pэл1↑,
 η↓, то есть Увеличение тока ротора при
том же моменте нагрузки.
η↓, то есть Увеличение тока ротора при
том же моменте нагрузки.

Задача регулирования частоты вращения относится к области электропривода. Её специалистами разработаны и построены различные устройства полупроводниковой техники (в частности широтноимпульсный преобразователь ШИМ и пр.) с несинусоидальным выходным напряжением, в которых АД успешно работают.
Выводы: Фδ превышающий нормальный, вызывает увеличение насыщения магнитной цепи и сильное увеличение намагничивающего тока, а уменьшение Фδ вызывает недоиспользование машины, уменьшение перегрузочной способности и увеличение тока I2 при неизменном значении М. Поэтому в большинстве случаев целесообразно поддерживать Фδ = const