

Общие вопросы машин переменного тока
Немного общих слов:
Электрические машины переменного тока бывают однофазными, двухфазными и трёхфазными (т = 1,2, 3). Два первых типа относятся к машинам малой мощности, применяемым в быту и системах автоматики. Машины средней и большой мощности, в том числе энергетические, трёхфазные. Существуют также многофазные машины с числом фаз больше трех, они относятся к специальным типам, и далее не рассматриваются. К основным типам машин переменного тока относятся синхронные машины (СМ) и асинхронные машины (AM).
Активная часть электрических машин переменного тока состоит из неподвижного статора и вращающегося ротора.
У основного типа исполнения электрических машин на статоре расположена m-фазная обмотка переменного тока, подключаемая к сети или к автономной нагрузке (у некоторых генераторов). Обмотка укладывается в пазы, находящиеся на внутренней поверхности сердечника статора. По сердечнику проходит переменный магнитный поток. Для уменьшения потерь от вихревых токов и гистерезиса сердечник набирается из листов электротехнической стали в форме колец, с наружным диаметром DH и внутренним D,. Листы изолированы между собой, спрессованы в монолитную конструкцию и стянуты по наружной поверхности. У мощных машин с большим наружным диаметром сердечник набирается из отдельных сегментов кольца, подобно сердечнику трансформатора.
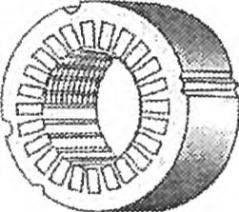
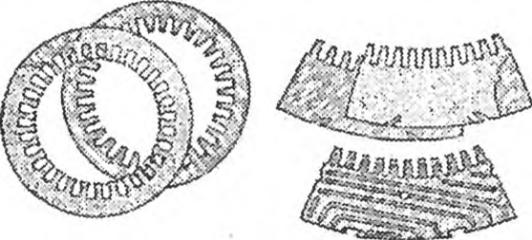
сердечник статора; листы сердечника статора и сегменты этих листов
Конфигурация пазов сердечника статора зависит от мощности машины. В машинах большой и средней мощности пазы прямоугольной формы, как и жёсткая отформованная пазовая часть катушек обмотки с наложенной на неё изоляцией. Машины малой мощности имеют мягкие катушки, иной способ их укладки в пазы, и иные формы пазов.
Статоры синхронных и асинхронных машин принципиальных отличий не имеют. Внутри сердечника статора находится ротор.
Кроме указанных ранее диаметров DH, DB, D1, D2, числа пар полюсов р, числа фаз т и зазора δ=0,5(D1-D2) отметим ещё ряд размеров некоторых конструктивных параметров:
l1, l2 — длины сердечников статора и ротора.
lδ = 0,5(l1+l2) - средняя длина воздушного зазора в осевом направлении.
τ — полюсное деление, измеренное по поверхности статора. Это расстояние между осями двух соседних полюсов разной полярности или между соседними нейтралями. Нейтраль — линия, проходящая посредине между соседними полюсами; τ имеет размерность длины

 — то
же, измеренное числом зубцовых делений
статора, умещающихся между этими осями,
безразмерная величина/
— то
же, измеренное числом зубцовых делений
статора, умещающихся между этими осями,
безразмерная величина/
 (1.1.2)
(1.1.2)
z1 — число зубцов статора, оно же число пазов. Зубцовое деление по поверхности статора:
 (1.1.3)
(1.1.3)
bп1> bz1 — ширина открытия паза и ширина зубца на поверхности статора.
z2 — число зубцов ротора для AM.
τz2, tz2 —роторные величины, аналогичные (1.1.2), (1.1.3).
bp — ширина полюсного наконечника СМ.
αδ — коэффициент полюсной дуги:
δр — зазор под краем полюсного наконечника.
Sδ — площадь полюсного деления статора:

1. Вращающееся магнитное поле
Действие всех многофазных машин переменного тока основано на использовании вращающегося магнитного поля. Такое поле можно получить двумя путями.
1. При вращении физических полюсов, образованных постоянными магнитами или электромагнитами с обмоткой, питаемой постоянным током.
2. При питании многофазной обмотки многофазным переменным током, с тем же числом фаз и одинаковыми углами сдвига между всеми фазами, равными 2π/m.
Первый путь реализуется ротором синхронной машины. Поле ротора неподвижно относительно обмотки и сердечника ротора, но вращается вместе с ним относительно поверхности и обмотки неподвижного статора.
Второй путь реализуется статорными обмотками AM и СМ и роторной обмоткой AM. Их поля движутся относительно обмоток и относительно сердечников, на которых располагаются обмотки.
Под вращением поля понимается вращение его магнитной оси, проходящей через середины северного и южного полюсов. Графически поля могут изображаться 2 способами — картиной силовых линий и кривой распределения индукции на двойном полюсном делении по какой-либо поверхности, обычно по внутренней поверхности статора в воздушном зазоре, где сосредоточена большая часть энергии поля.
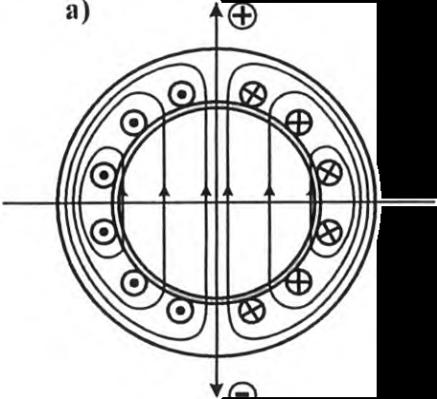
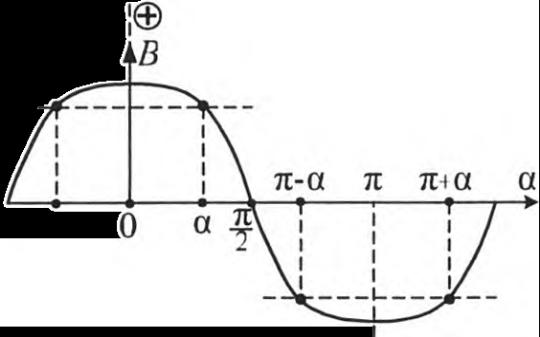
Рисунок 1
При достаточной длине в осевом направлении главное поле в ЭМ - поле в воздушном зазоре в первом приближении можно считать двумерным, принимая картину поля в любом сечении по длине сердечника одинаковой. Изменения, наблюдаемые в торцевых зонах, могут оказывать отрицательное влияние на работу машины, однако, эти явления сложные и, относительно, второстепенные.
При вращении поля его картина для разных моментов времени изменяется незначительно.
Модель статора элементарной 3-фазной электрической машины изображена в поперечном разрезе на рисунке:
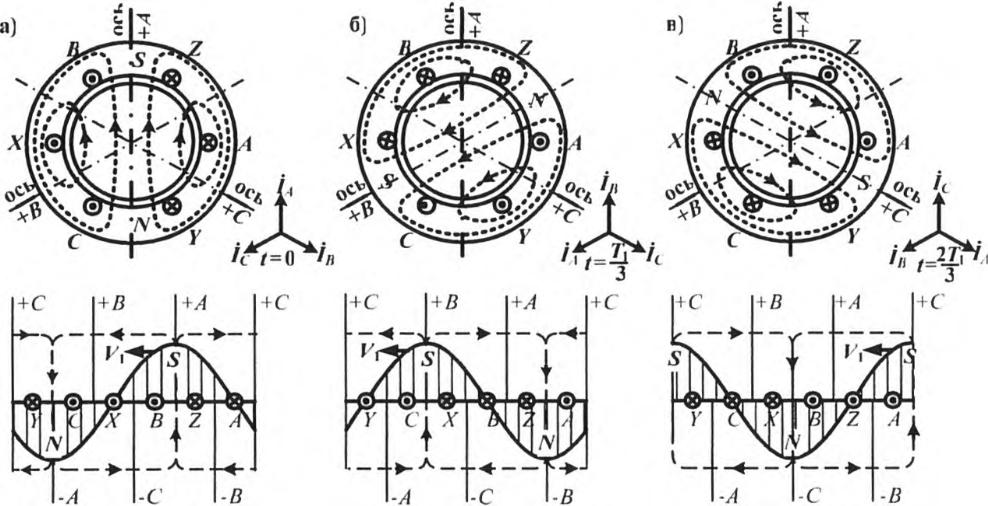
Рисунок 2.
Каждая фаза обмотки представлена здесь одним витком, стороны которого проводники А-Х, B-Y и C-Z. Магнитные оси витков сдвинуты в пространстве на угол 120°эл. По виткам проходят токи ia, ib, ic, сдвинутые но фазе на угол 2л/3, как показано на векторных диаграммах. Положительный ток создаёт магнитный поток, направленный в сторону положительной магнитной оси контура, поэтому в периоды времени, когда ток фазы положительный, в проводниках А, В, С он течёт от нас (знак х), а в проводниках X, Y, Z к нам (знак точка). При отрицательных токах — наоборот. Ротор изображён условно в виде гладкого шихтованного сердечника без обмоток. Сопоставляя три картины, соответствующие трём моментам времени, когда токи каждой из фаз поочередно достигают положительного максимума, устанавливаем факт вращения поля, созданного данной 3-х фазной обмоткой. За время равное одной трети периода переменного тока t = T1/3 = 1/(3f1) ось поля поворачивается на угол 2π/3 эл. рад., или сдвигается по поверхности статора на 2т/3. Угол в электрических радианах αэл равен углу в геометрических радианах αг, умноженному на число пар полюсов: αэл = αг*р.
За один период T1 ось поля сдвигается на двойное полюсное деление машины 2τ или поворачивается на угол αг1 = 2π/р в геометрических мерах угла. Тогда линейная скорость поля на поверхности статора:

а угловая скорость вращения поля
 (1.1.10)
(1.1.10)
Здесь величина
![]() об/сек (1.1.11)
об/сек (1.1.11)
называется частотой вращения (поля), где ω1 —угловая частота.
Положительная величина скорости поля: n1>0, Ω1>0, ω1>0 соответствует вращению поля статора в направлении от оси фазы А к оси фазы В, когда поле создаётся токами фаз, образующих прямую последовательность, как на рисунке 2.
Скорости вращения ротора и поля в машинах переменного тока
Описание вращающихся полей в электрических машинах возможно проводить в разных системах координат. Наиболее часто используются три системы координат: жёстко связанная со статором (статорная система), с ротором (роторная система) и система синхронно-вращающихся осей. Например, выражения (1.1.9)-( 1.1.11) записаны в статорной системе осей координат.