

Титульный лист
Реферат на тему: «Боковая перегрузка Sukhoi Superjet 100»
Оглавление
1 Понятие о перегрузках в авиации 3
2 Датчики измеряющие боковую перегрузку 6
3 Авиационные бортовые приборы 10
Заключение 13
Список литературы 14
1 Понятие о перегрузках в авиации
Перегрузкой называется отношение суммы всех сил, кроме силы веса, действующих на самолет, к весу самолета, и определяется по формуле:
n = (P+R) / G,
где P – тяга двигателя;
R – суммарная аэродинамическая сила.
Стрелки над символами в формуле указывают, что учитывается направление действия сил, поэтому силы нельзя складывать алгебраически.
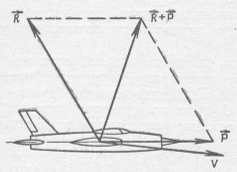
Рисунок 1 – Равнодействующая тяги двигателя и суммарной аэродинамической силы
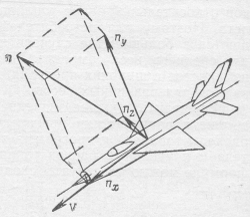
Рисунок 2 – Положительные направления перегрузок
Например, если аэродинамическая сила R и тяга двигателя P лежат в плоскости симметрии, то их сумма R+P, определяется, как показано на рисунке 1.
В большинстве случаев пользуются не суммарной перегрузкой n, а ее проекциями на оси скоростной системы координат – nx, ny, nz как показано на рисунке 2.
Существуют три вида перегрузки: нормальная, продольная и боковая.
Нормальная перегрузка ny определяется в первую очередь подъемной силой и определяется по формуле:
ny = Y/G,
где Y – подъемная сила.
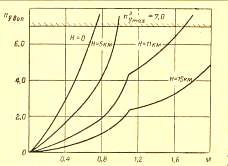
Рисунок 3 – Зависимость предельных нормальных перегрузок от высоты и скорости полёта
На заданной скорости и высоте полета изменить нормальную перегрузку можно путем изменения угла атаки. Как показано на рисунке 3 с уменьшением скорости полета предельные нормальные перегрузки возрастают, а с увеличением высоты – уменьшаются. При отрицательном угле атаки возникают отрицательные перегрузки.
Продольная перегрузка nx определяется отношением разности сил тяги двигателя (Р) и лобового сопротивления (Q) к весу самолета:
nx = (P-Q) / G.
Продольная перегрузка положительна, если тяга больше лобового сопротивления, и отрицательна, если тяга меньше лобового сопротивления или если тяги вообще нет.
Рисунок 4 – Зависимости продольной перегрузки от высоты и скорости полёта
Таким образом, знак продольной перегрузки зависит от соотношения величин тяги двигателя и лобового сопротивления самолета.
С увеличением высоты полета положительные продольные перегрузки nх уменьшаются, т. к. уменьшается избыточность тела. Зависимость продольной перегрузки от высоты и скорости полета изображена на рисунке 4.
Боковая перегрузка nz возникает при несимметричном обтекании самолета воздушным потоком. Это наблюдается при наличии скольжения, либо при отклонении руля направления.
Боковая перегрузка nz возникает при полете самолета со скольжением. Но по величине боковая аэродинамическая сила Z очень мала. Поэтому в расчетах боковую перегрузку принимают равной нулю. Боковая перегрузка определяется по формуле:
nz = Z / G,
nz - боковая перегрузка;
Z - величина боковой аэродинамической силы;
G - аэродинамические силы (подъемная сила и лобовое сопротивление), сила тяги двигательной установки и сила земного притяжения, которую называют весом, G = m ⋅ g.
2 Датчики измеряющие боковую перегрузку
Измерение вектора перегрузки (линейного ускорения) осуществляется датчиками перегрузки – низкочастотными линейными акселерометрами (диапазон частот 0 – 400 Гц). В дальнейшем будем их называть датчиками перегрузки или линейными акселерометрами.
Линейные акселерометры по назначению и обусловленному этим назначением диапазону и собственной частоте условно разделены на следующие три группы:
· датчики перегрузки самолета с собственной частотой чувствительного элемента 5 – 50 Гц и диапазоном измерения до ±10g;
· низкочастотные датчики виброперегрузки с собственной частотой чувствительного элемента 100 – 400 Гц и диапазоном измерения до ±10g;
· широкополосные датчики виброперегрузки с собственной частотой чувствительного элемента 20 000 – 30 000 Гц и диапазоном измерения до ±150 g.
Обобщенная схема классификации линейных акселерометров для летных испытаний представлена на рисунке 5.
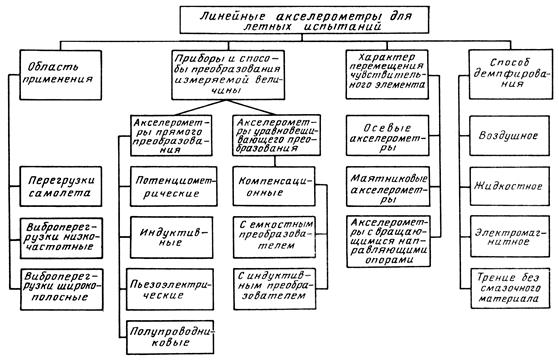
Рисунок 5 – Схема классификации линейных акселерометров для летных испытаний
Для измерений перегрузок самолета широко применяются потенциометрические датчики. С их помощью наиболее просто реализуется измерительная схема с непосредственной регистрацией на аппаратуру точной магнитной записи или светолучевые осциллографы.
Наиболее широкое применение получили три принципиальные схемы построения акселерометров (рисунке 6).
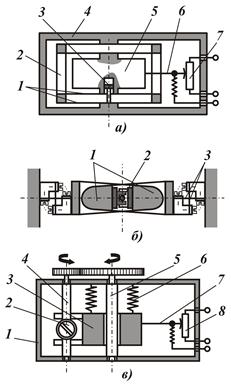
Рисунок 6 – Принципиальные схемы датчиков перегрузки: а) – осевой акселерометр с плоскими пружинами: 1 – пружины; 2 – стойки; 3 – поршень воздушного демпфера; 4 – корпус; 5 – инерционная масса; 6 – ползунок; 7 – потенциометр; б) – маятниковый акселерометр; 1 – маятники; 2 – шарнир; 3 – пружина; в) – акселерометр с вращающимися направляющими опорами и сухим трением: 1 – корпус; 2 – демпфер; 3 – инерционная масса; 4 – ось демпфера; 5 – вращающаяся опора; 6 – пружина; 7 – ползунок; 8 – потенциометр.
В первой схеме осевого акселерометра направление перемещения груза чувствительного элемента обеспечивается упругой системой из плоских пружин (рисунке 6а). Эта система осуществляет линейное перемещение чувствительного элемента, однако она имеет довольно существенный недостаток, заключающийся в наличии второго резонанса, близко расположенного к основной частоте, который обусловлен незадемпфированными массами соединительных деталей на концах плоских пружин. Частота второго резонанса в 3 – 4 раза выше основной частоты.
Ряд датчиков, имеющих сравнительно малый диапазон перегрузок (до ±2 g), построен по схеме (рисунок 6б). Чувствительный элемент этих датчиков выполнен в виде двух горизонтальных маятников, шарнирно связанных между собой. Маятники подвешены на системе из двух пар перекрещивающихся под прямым углом плоских пружин, выполняющих роль упругих шарниров. Нагрузки по вертикальной оси, перпендикулярной плоскости перемещения маятников, не воспринимаются схемой, так как моменты сил маятников относительно вертикальных осей взаимно компенсируются в шарнире.
В датчиках предусмотрены различные виды демпфирования колебаний груза чувствительного элемента. Система демпфирования является одним из слабых мест в конструкции указанных акселерометров.
Применение жидкостного демпфирования ограничивает температурный диапазон датчика из-за большого температурного коэффициента вязкости рабочей жидкости, необходимости герметизации и учета присоединенной массы жидкости. Для сохранения постоянства степени демпфирования, равной 0,4 – 0,8 при изменении температуры окружающей среды, в ряде датчиков предусмотрен биметаллический регулятор, изменяющий величину зазора, через который протекает жидкость. Изменение степени демпфирования составляет ±0,2 при работе датчика в климатическом диапазоне температур.
Воздушный демпфер эффективен для негерметичных акселерометров лишь на малых высотах полета.
Электромагнитный демпфер, принцип действия которого основан на возникновении вихревых токов, тормозящих движение металлических деталей, перемещающихся в магнитном поле, практически не обеспечивает степень демпфирования, близкую к оптимальной.
Поэтому широко распространены датчики перегрузки с вращающимися направляющими опорами и трением без смазочного материала (сухим трением). В основе принципа работы датчика лежит идея, высказанная Н. Е. Жуковским, об уменьшении трения при движении вдоль вращающейся направляющей.
Эта, идея реализуется в виде вращающихся направляющих массы чувствительного элемента (рисунке 6в). Этот же эффект используется для демпфирования колебаний груза чувствительного элемента, причем демпфирование в этом случае имеет характер вязкого трения. Груз, подвешенный на системе винтовых пружин, перемещается вдоль жестких осей, одна из которых является направляющей, а другая одновременно служит осью демпфера. С целью устранения влияния Кулонова трения, оси приводятся во вращение электромотором. Датчики этого типа имеют сравнительно лучшие метрологические характеристики – основная погрешность составляет примерно 0,5 %. Уменьшение погрешности в некоторых датчиках (до 0,2 %) осуществляется применением многошкального (многоступенчатого) потенциометра.
Величина перегрузки, определяемая датчиком, искажается рядом погрешностей, основными из которых являются инструментальные, динамические и методические.
Инструментальные погрешности (основная и дополнительные) возникают в результате изменения параметров и характеристик материалов, из которых изготовлен датчик, несовершенства технологии, действия на параметры датчика влияющих величин. К источникам погрешности можно отнести силы трения и люфты в опорах и направляющих, гистерезис и упругое последействие системы подвески инерционной массы, изменение характеристик чувствительного элемента при изменении окружающей температуры и режимов источника питания и др. Важным фактором является исключение или сведение к минимуму влияния не измеряемых составляющих перегрузок. Эта составляющая погрешности свойственна той или иной конструкции датчика и характеризует несовершенство последней.
Анализ оценки точности измерения перегрузки потенциометрическими датчиками различных моделей показывает, что, например, случайные составляющие погрешности измерения, полученные в лабораторных условиях и на установившихся режимах полета, практически одинаковы. Случайная составляющая перегрузки на неустановившихся режимах полета может увеличиться в 2 – 4 раза. Систематическая составляющая погрешности датчиков в полетах имеет переменный характер и составляет 0,01 – 0,02 единиц перегрузки. Применение совершенных конструктивных и технологических приемов и решений позволяет, как известно, уменьшить инструментальные погрешности до величины.