

10.4.Уравнения и передаточные функции дискретных систем
10.4.1.Уравнение и передаточная функция разомкнутой дискретной системы
Структурная схема разомкнутой дискретной системы с одним импульсным элементом выглядит следующим образом (рис.10.28):

Здесь
![]() -
последовательность мгновенных импульсов
типа-функций,
модулированных непрерывным сигналом
-
последовательность мгновенных импульсов
типа-функций,
модулированных непрерывным сигналом
![]() ;
;![]() -
передаточная функция приведенной
непрерывной части системы.
-
передаточная функция приведенной
непрерывной части системы.
Проблема 1. необходимо найти уравнение, связывающее временные функции
на входе и на выходе разомкнутой дискретной системы, то-есть, найти уравнение разомкнутой дискретной системы во временной области.
Будем последовательно рассматривать реакцию приведенной непрерывной части
на последовательность мгновенных импульсов, приложенных к её входу.
1. Пусть на вход подан один импульс единичной площади (рис.10.29).

Рис. 10.29
2. На входе приведенной непрерывной части действует мгновенный импульс единичной площади, но сдвинутый на n периодов дискретизации (рис.10.30).

3. Теперь посмотрим реакцию ПНЧ на мгновенный импульс, смещенный на n
периодов и модулированный непрерывным сигналом ( рис.10.31).
Рис. 10.31
4.Наконец, посмотрим реакцию приведенной непрерывной части системы на последовательность мгновенных импульсов, модулированных непрерывным сигналом, (рис.10.32).
Рис. 10.32
![]()
По полученному
уравнению считают выходную переменную
для ![]() Тогда
Тогда
уравнение
разомкнутой системы ![]()
2. Вторая проблема – получить уравнение в -изображениях для разомкнутой системы.
Подвергнем
последнее уравнение -преобразованию:
 Согласно теореме об изображении свертки
имеем
Согласно теореме об изображении свертки
имеем
![]() Обозначая
Обозначая ![]() ,
имеем окончательно
,
имеем окончательно
![]()
Таким
образом получено уравнение в -изображениях
для разомкнутой дискретной системы.
-изображение
![]() называется передаточной функцией
разомкнутой системы. Так как через
передаточную функцию можно найти
называется передаточной функцией
разомкнутой системы. Так как через
передаточную функцию можно найти
только ряд дискретных значений выходной величины, такую передаточную функцию называют дискретной передаточной функцией. Её находят двумя способами:
1.Используя обратное
преобразование Лапласа ![]() =
=![]() и затем подвергая -преобразованию:
и затем подвергая -преобразованию:
![]() ;
;
2.Определяют
![]() непосредственно
по
непосредственно
по
![]() ,
разлагая последнюю передаточную функцию
на ряд простых слагаемых.
,
разлагая последнюю передаточную функцию
на ряд простых слагаемых.
Два
замечания по определению ![]() :
:
дискретная передаточная функция нескольких последовательно соединенных
непрерывных звеньев не равна произведению их передаточных функций (рис.10.33);

для схемы
рис. 10.33 справедливо ![]()
![]()
дискретная передаточная функция параллельно соединенных элементов равна сумме передаточных функций отдельных элементов (рис.10.34).
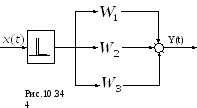
Для
схемы рис.10.34 имеем: ![]()
где
![]()
10.4.2. Уравнение и передаточные функции замкнутой дискретной системы
Необходимо найти уравнение и передаточную функцию замкнутой дискретной системы с одним импульсным элементом (рис.10.35).

Запишем
уравнение разомкнутой системы: ![]() В этом уравнении
В этом уравнении
входной
сигнал ![]() есть
ошибка – разность между задающим
воздействием
есть
ошибка – разность между задающим
воздействием
![]() и выход
и выход
ной величиной
![]() :
:![]() Подвергнем ошибку преобразованию
Лапласа:
Подвергнем ошибку преобразованию
Лапласа: ![]()
Подставляем -преобразование ошибки в уравнение разомкнутой системы.
![]() .
.
После
несложных преобразований получаем ![]()
Из последнего выражения нетрудно получить формулу для передаточной функции замкнутой системы:
![]()
Отметим, что полученное выражение по форме полностью аналогично выражению передаточной функции замкнутой непрерывной системы.
Получим теперь выражение передаточной функции замкнутой системы по ошибке, то-есть, отношение изображений ошибки к изображению задающего воздействия.
Опять
подвергнем уравнение ошибки -
преобразованию:![]()
Заменим в
этом уравнении
![]() выражением:
выражением:![]()
![]() =
=![]() .
Отсюда нетрудно получить выражение
.
Отсюда нетрудно получить выражение
передаточной функции по ошибке для замкнутой дискретной системы:
![]() .
.
Видим, что полученное выражение передаточной функции полностью по форме
повторяет соответствующее выражение для непрерывной замкнутой системы.
10.4.3. Уравнения и передаточные функции дискретных систем произвольной структуры.
Дискретные системы управления, что мы рассматривали ранее, содержали один дискретный элемент, стоящий в прямом канале системы после узла сравнения. Однако, существует множество дискретных систем, где дискретный элемент расположен или в цепи обратной связи, или в середине прямой цепи, или сразу во многих точках замкнутых контуров.
Чтобы записывать уравнения в - изображениях в дискретных автоматических системах управления произвольной структуры, следует пользоваться тремя следующими правилами.
1. Если дискретный сигнал действует на группу непрерывных звеньев (рис. 10.36), то - изображение выходного сигнала

![]()
где
![]() есть
символическое обозначение
есть
символическое обозначение
![]()
2.
Если непрерывный сигнал действует на
входе одного или нескольких непрерывных
звеньев, то ![]()
-изображение выходного сигнала (рис.10.37) будет равно:

![]() где
где
![]() есть
преобразование произведения непрерывных
изображений
есть
преобразование произведения непрерывных
изображений ![]() .
.
3. Третье правило устанавливает порядок записи уравнений в -изображениях, когда дискретный сигнал действует на группу непрерывных звеньев, разделенных
дискретными элементами, действующими синхронно (рис.10.38).

Изображение
выходного сигнала ![]()
Используя выше сформулированные правила для записи уравнений в -изображениях, рассмотрим несколько конкретных примеров.
Система с импульсным датчиком (рис.10.39,а).
Чтобы написать уравнения, предварительно трансформируем исходную схему,
выполнив искусственный разрыв контура перед первым импульсным элементом (рис.10.39,б).
Рис.10.39
![]()
![]()
![]()
И окончательно,
можем написать ![]() Однако по этому выражению нельзя
написать передаточную функцию замкнутой
системы, так как нет свободного
-изображения
входного сигнала
Однако по этому выражению нельзя
написать передаточную функцию замкнутой
системы, так как нет свободного
-изображения
входного сигнала
![]() .
.
2. Система с дискретизацией сигнала обратной связи (многоточечное регулирование) (рис.10.40,а).

В этом
случае, в преобразованной схеме (рис.
10.40,б) вводится промежуточная величина
![]() ,
для которой и записывается
- изображение:
,
для которой и записывается
- изображение:
![]()
-изображение
выходной величины
![]()
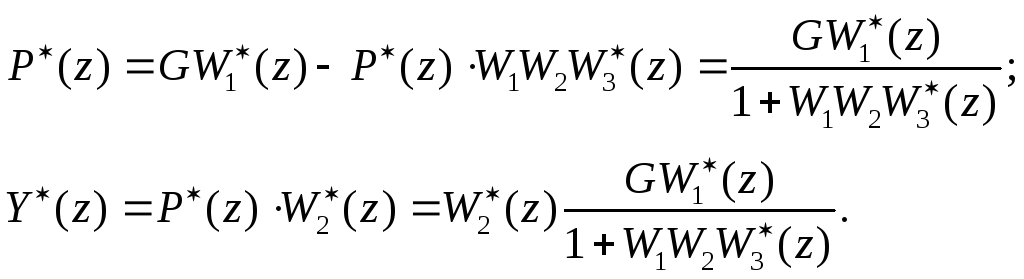
3. Система с дискретным элементом в середине прямого канала системы (рис.10.41,а).

4. Система с цифровым контроллером в прямом канале системы (рис. 10.42,а).
В этой схеме: Е1- дискретный элемент, соответствующий преобразователю АД системы; Е2 – дискретный элемент, соответствующий преобразователю ДА системы.

Согласно
схеме, рис.10.42,б, напишем уравнения в
-изображениях,
сначала, для промежуточной величины
![]() ,
потом для выходной величины
,
потом для выходной величины![]() .
.