

3. Continuous - блоки непрерывных моделей
В этой группе 3 компонента:
блок вычисления производной Derivative;
интегратор integrator;
передаточная функция Transfer Fcn.
Блок вычисления производной Derivative
Пиктограмма блока вычисления производной Derivative приведена на рис.2.19.
Рис. 2.19. Пиктограмма блока Derivative.
Назначение: выполняет численное дифференцирование входного сигнала. Окно задания параметров блока Derivative приведено на рис.2.20.
Параметры: нет.
Рис.2.20. Окно задания параметров блока Derivative.
Для вычисления производной используется приближенная формула Эйлера:
![]() ,
,
где
![]() – величина
изменения входного сигнала за время t,
– величина
изменения входного сигнала за время t,
![]() – текущее значение
шага модельного времени.
– текущее значение
шага модельного времени.
Значение входного сигнала блока до начала расчета считается равным нулю. Начальное значение выходного сигнала также полагается равным нулю.
Точность вычисления производной существенно зависит от величины установленного шага расчета. Выбор меньшего шага расчета улучшает точность вычисления производной.
На рис. 2.21 показан пример использования дифференцирующего блока для вычисления производной прямоугольного сигнала. В рассматриваемом примере, для повышения наглядности, шаг расчета выбран достаточно большим.
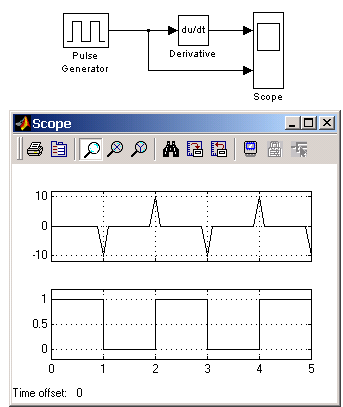
Рис.2.21. Использование дифференцирующего блока.
Интегратор Integrator
Пиктограмма интегратора приведена на рис.2.22.
Рис.2.22. Пиктограмма интегратора.
Назначение: выполняет интегрирование входного сигнала. Параметры интегратора задаются в окне задания параметров приведенные на рис.2.23.
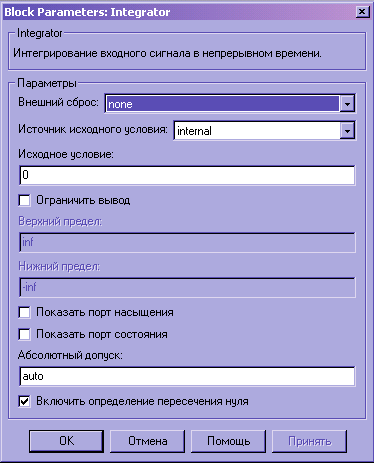
Рис.2.23. Окно задания параметров блока Integrator.
Параметры:
external reset – внешний сброс. Тип внешнего управляющего сигнала, обеспечивающего сброс интегратора к начальному состоянию. выбирается из списка:
none – нет (сброс не выполняется),
rising - нарастающий сигнал (передний фронт сигнала),
falling - спадающий сигнал (задний фронт сигнала),
either – нарастающий либо спадающий сигнал,
level – не нулевой сигнал (сброс выполняется если сигнал на управляющем входе становится не равным нулю).
В том случае, если выбран какой-либо (но не none), тип управляющего сигнала, то на изображении блока появляется дополнительный управляющий вход. Рядом с дополнительным входом будет показано условное обозначение управляющего сигнала.
initial condition source — источник начального значения выходного сигнала выбирается из списка:
internal – внутренний;
external – внешний. В этом случае на изображении блока появляется дополнительный вход, обозначенный x0, на который необходимо подать сигнал, задающий начальное значение выходного сигнала интегратора.
На рис. 2.24 показан пример работы интегратора при подаче на его вход ступенчатого сигнала. Начальное условие принято равным нулю.
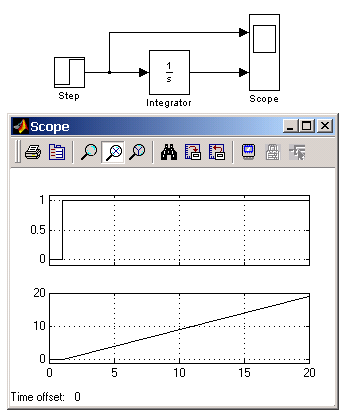
Рис.2.24. Использование интегратора.
Передаточная функция Transfer Fcn
Пиктограмма блока передаточной функции Transfer Fcn приведена на рис.2.25.

Рис.2.25. Пиктограмма блока передаточной функции.
Назначение: блок передаточной функции Transfer Fcn задает передаточную функцию в виде отношения полиномов:
 ,
,
где параметры:
nn и nd – порядок числителя и знаменателя передаточной функции,
num – вектор или матрица коэффициентов числителя,
den – вектор коэффициентов знаменателя.
Коэффициенты функции задаются в виде массивов [num(nn) num(nn-1) … num(0)] и [den(nd) den(nd-1) … den(0)], где num(i) и den(j) – коэффициенты при si и sj в числителе и знаменателе, соответственно.
Окно задания параметров блока передаточной функции приведено на рис.2.26.
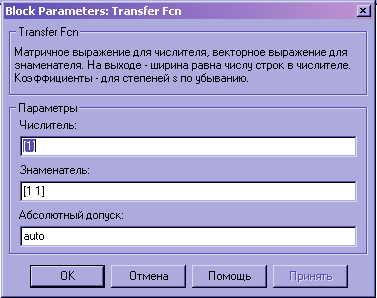
Рис.2.26. Окно задания параметров блока передаточной функции.
Порядок числителя не должен превышать порядок знаменателя.
Входной сигнал блока должен быть скалярным. В том случае, если коэффициенты числителя заданы вектором, то выходной сигнал блока будет также скалярным (как и входной сигнал). На рис.2.27 показан пример моделирования колебательного звена с помощью блока Transfer Fcn.
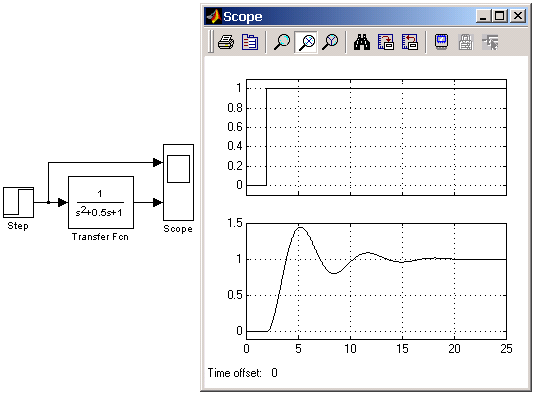
Рис.2.27. Пример моделирования колебательного звена с помощью блока Transfer Fcn.