

Типовые динамические звенья
При анализе и синтезе САУ целесообразно представлять сложную передаточную функцию системы в виде произведения элементарных передаточных функций – типовых звеньев (11)
|
|
(11) |
 ,
,
где
 .
.
Расчленение САУ на типовые звенья имеет не только формальную математическую, но и техническую основу. Целесообразность разбиения динамического элемента на типовые звенья объясняется особенностью технической реализации САУ, состоящих обычно из совокупности сравнительно несложных устройств направленного действия, описываемых дифференциальными уравнениями первого и второго порядков.
Звенья, имеющие передаточные функции, соответствующие трем типам сомножителей, входящих в знаменатель, будем называть интегрирующими, апериодическими и колебательными.
Звенья, имеющие передаточные функции, которые соответствуют четырем типам сомножителей числителя, будем называть усилительными, идеальными дифференцирующими, форсирующими первого порядка и форсирующими второго порядка.
Кроме того, многие реальные элементы САУ имеют передаточные функции, достаточно близкие к передаточным функциям типовых звеньев. Следовательно, анализ динамики таких элементов значительно упрощается.
Рассмотрим основные типовые звенья, которые наиболее часто встречаются на практике.
Апериодическое (инерционное) звено
Дифференциальное уравнение апериодического звена:
|
|
(12) |
Уравнению (12) соответствует передаточная функция апериодического звена:
|
|
(13) |
Переходную функцию получим из (10):
|
|
(14) |
Вид переходной характеристики апериодического звена представлен на рис.3.
Параметр Т имеет размерность времени и называется постоянной времени.
Рисунок 3 иллюстрирует графическое определение постоянной времени Т по экспериментальной переходной функции апериодического звена.
Рис. 3. Переходная характеристика апериодического звена.
Касательная, проведенная к h(t) при t = 0 пересекает ординату 1 при t=T. Тогда:
|
|
|
В таблице 1 приведены значения h(t) в моменты времени, кратные Т, из которой видно, что переходный процесс в апериодическом звене можно считать закончившимися при t ≥ 3T.
Таблица 1
Значения переходной характеристики
t |
T |
2T |
3T |
4T |
5T |
h(t) |
0,63 |
0,86 |
0,95 |
0,98 |
0,993 |
Постоянная времени апериодического звена определяется из эксперимента по осциллограмме. На лабораторном стенде апериодическое звено реализовано на R, C элементах (рис.4).

Рис. 4. Апериодическое звено на RC элементах.
Передаточную функцию звена получим из уравнений:
|
|
|
|
|
|
где T=RC; [T]=[R][C] = Ом·Ф = сек.
Аналогично передаточную функцию апериодического звена на R, L элементах (рис.5) получим из уравнений:
|
|
|
|
|
|

где T = L/R, [T]=[L]/[R] = ГнОм = сек.

Рис. 5. Апериодическое звено на RL-элементах.
Дифференцирующее звено первого порядка
Идеальным дифференцирующим звеном первого порядка называется звено, имеющее передаточную функцию вида:
|
|
(15) |
которой соответствует дифференциальное уравнение
|
|
|
Звено с передаточной функцией (15) является физически нереализуемым (m>n). На практике дифференцирующие звенья имеют передаточную функцию:
|
|
(16) |
которой соответствует дифференциальное уравнение:
|
|
|
Переходная функция реального дифференцирующего звена имеет вид:
|
|
(17) |
График переходной характеристики приведен на рис.6. Способ определения параметра Т тот же, что и для апериодического звена.
Рис. 6. Переходная характеристика дифференцирующего
звена первого порядка.
На рисунке 6 видно: касательная к h(t) при t = 0 пересекает ось абсцисс при t = T. Тогда h(t) = e-1=0,37.
Постоянная времени дифференцирующего звена первого порядка определяется из эксперимента по осциллограмме. На лабораторном стенде дифференцирующее звено первого порядка реализовано на R, C элементах (рис.7).
Рис. 7. Дифференцирующее звено первого порядка
на RC-элементах.
Передаточная функция этого звена:
|
|
|
где T=RC.
Аналогично передаточная функция дифференцирующего звена 1-го порядка, реализованная на RL-элементах (рис.8), определяется следующим образом:
|
|
|
где
![]() .
.
Рис. 8. Дифференцирующее звено первого порядка
на RL-элементах.
Переходная характеристика, реализованных для звеньев RC и RL (рис.7, 8), определяется из выражения:
|
|
(18) |
Колебательное звено
Колебательным звеном называется звено второго порядка, имеющее передаточную функцию
|
|
(19) |
Дифференциальное уравнение колебательного звена
|
|
(20) |
где 0≤ξ<1.
Характеристическое уравнение, соответствующее дифференциальному уравнению (20) имеет следующий вид:
|
|
|
корни этого уравнения определяются зависимостью
|
|
(21) |
Из
выражения (21) следует, что при
![]() корни
корни
![]() и
и
![]() получаются комплексными, следовательно,
для решения уравнения (20) будет характерна
колебательная составляющая, а при
получаются комплексными, следовательно,
для решения уравнения (20) будет характерна
колебательная составляющая, а при
![]() корни
и
- действительные отрицательные и
собственное решение уравнения (20) будет
иметь затухающий апериодический
характер.
корни
и
- действительные отрицательные и
собственное решение уравнения (20) будет
иметь затухающий апериодический
характер.
Определим переходную функцию колебательного звена. Согласно (10) имеем:
|
|
(22) |
где
|
|
|
Переходная характеристика колебательного звена показана на рис.9.
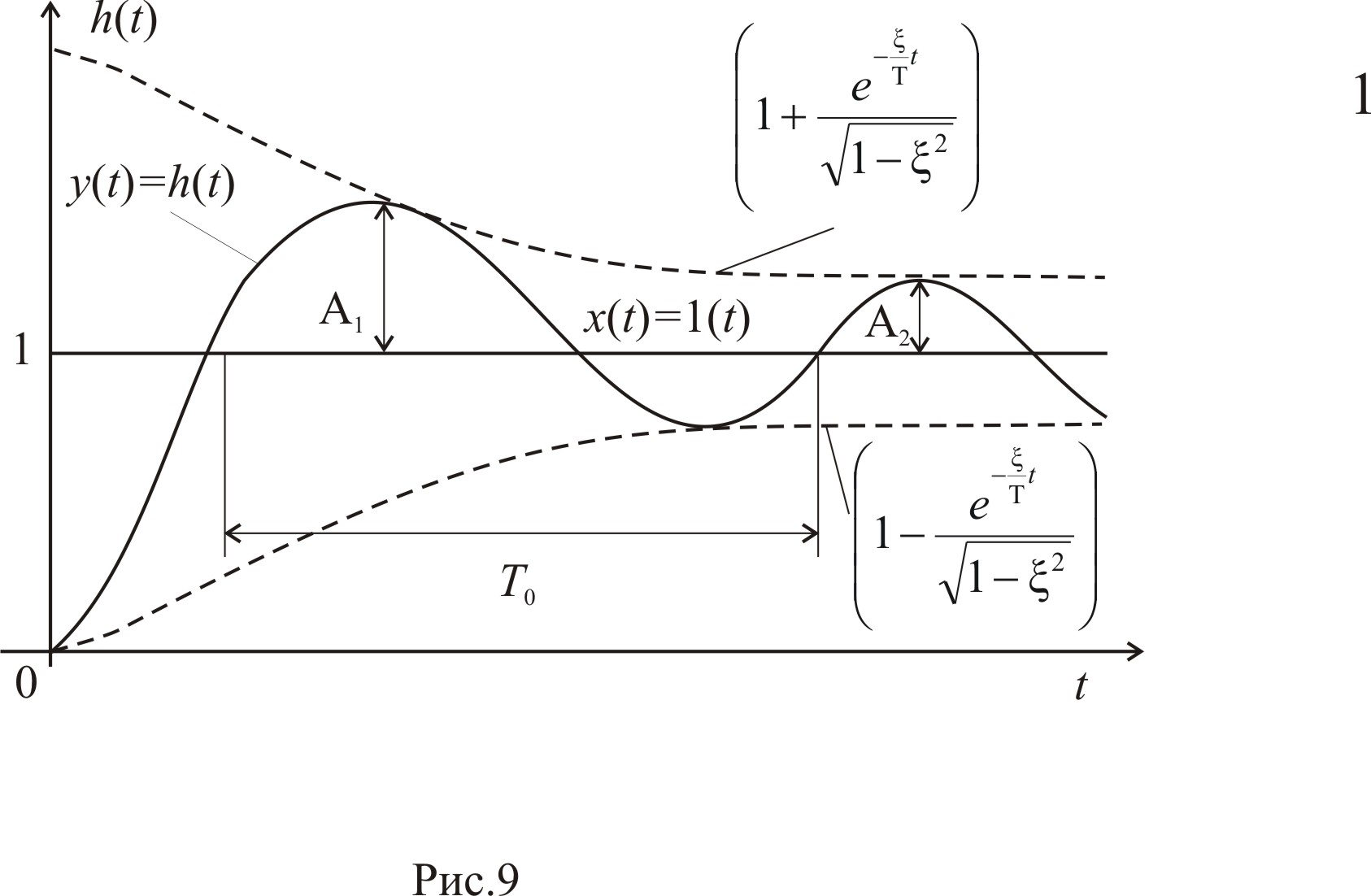
Рис. 9. Переходная характеристика колебательного звена.
Для переходной характеристики колебательного звена параметры Т и вычисляют по формулам (рис.9):
|
|
(22) |
|
|
(24) |
Рассмотрим случай . Передаточная функция (19) может быть представлена как
|
|
(25) |
где
|
|
|
В частном
случае при
![]() .
.
Звено с передаточной функцией (25) ( ) называется апериодическим звеном второго порядка. Переходная характеристика такого звена имеет вид:
|
|
(26) |

График переходной характеристики (26) показан на рис.10.
Рис. 10. Переходная характеристика апериодического
звена второго порядка.
Рассмотрим
частный случай колебательного звена
при
![]() .
.
В этом случае колебательное звено называется консервативным. Его передаточная функция
|
|
|
Переходная характеристика
|
|
|
представляет незатухающие
гармонические колебания с частотой
![]() (рис.11).
(рис.11).
Рис. 11. Переходная характеристика консервативного звена.
На лабораторном стенде колебательное звено реализовано на R,L,C–элементах (рис.12).
Рис. 12. Колебательное звено на R,L,C–элементах.
Передаточную функцию колебательного звена получим из уравнений:
|
|
|
|
|
|
где
![]() .
.
Переходный процесс в цепочке R,L,C (рис.12) будет колебательным при выполнении условия
![]()
или
![]() .
.