

Теория управления / ЛР-6
.docЛабораторная работа № 6
Исследование устойчивости и качества линейной системы автоматического управления с применением MatLAB
Запустить Matlab.
Запустить Simulink
 .
.Создать новый файл модели.
Собрать и зарисовать схему для определения ошибки в системе с П-регулятором.
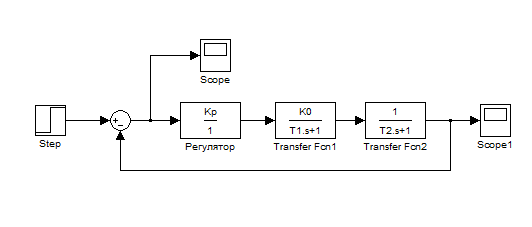
В свойствах блока Step задать Step time равным 0, уровень сигнала выставить в соответствии с вариантом из лабораторной работы № 6.
В свойствах блока Sum задать List of signs |+-.
Все коэффициенты в блоках Transfer Fcn задать в соответствии с заданием из разработки для лабораторной работы № 6.
Заполнить таблицу и построить по ней график.
kп |
0,05 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
е уст. теор. |
|
|
|
|
|
|
|
|
|
|
|
е уст. мод. |
|
|
|
|
|
|
|
|
|
|
|
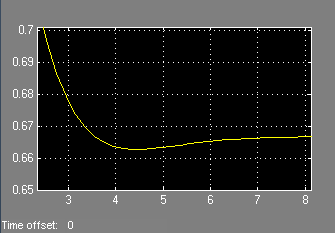
е уст. мод. можно снять с осциллографа Scope, приблизив установившейся участок.
Для kп=0,05, 0,5 и 1,0 зарисовать графики переходного процесса и ошибки с осциллографов Scope1 и Scope (на одном графике).
Изменить схему для снятия интегральной квадратичной оценки для И-регулятора.
Отметить вход и выход системы, нажав правой кнопкой мыши на нужном проводнике и выбрав Linearization Points→ Input Point и Linearization Points→ Output Point. Схема будет выглядеть следующим образом.
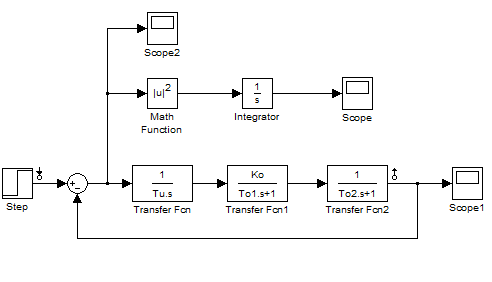
В блоке Math Function выбрать возведение в квадрат.
Заполнить таблицу и построить по ней график. Определить kопт и kгр .
kи
J0
Построить переходные процессы и заполнить таблицу:
kи |
0,2kопт |
kопт |
2kопт |
hmax |
|
|
|
tп, c |
|
|
|
σ, % |
|
|
|
Написанное ниже работает не во всех версиях Matlab .
Для их построения вызвать меню Tools→Control Design→Linear Analysis… В открывшемся окне нажать Linearize Model. В оке LTI viewer нажать правой кнопкой мыши, выбрать Propertis→Options→Show setting time within 5%. Зарыть свойства. ПКМ →Characteristics→Peak Response и ПКМ →Characteristics→Setting time.
В дальнейшем при изменении kи можно данные манипуляции не повторять, а просто нажимать на кнопку Linearize Model, и в LTI viewer через контекстное меню выбирать только последнюю модель.
Зарисовать графики переходного процесса (на одном графике) для 0,2kопт, kопт и 2kопт.
Повторить 5-9 для ПИ-регулятора.