

el_lab4
.pdfОтчет по лабораторной работе № 4
по дисциплине «Элементы систем управления» на тему «Изучение датчиков частоты вращения и датчиков углового положения»
Часть 1
Изучение датчиков частоты вращения
Цель работы:
1.Изучить режимы работы и основные характеристики тахогенератора постоянного тока и оптического энкодера.
2.Овладеть методами экспериментального исследования данных устройств и определения точности преобразования скорости и угла поворота в электрический сигнал.
3.Сравнить экспериментальные характеристики с теоретическими и оценить погрешности.
4.Определить сравнительные качества тахогенератора и оптического инкрементального энкодера.
Основные технические характеристики тахогенератора постоянного тока ТГП-1:
Характеристика
Масса тахогенератора, кг
Максимальная скорость вращения, об/мин
Коэффициент трансформации CU, В/(об/мин)
Нелинейность изменения выходного напряжения, %
Асимметрия выходного напряжения АТ, %
Номинальное сопротивление RH, кОм
Температурный коэффициент выходного напряжения δU/T, %/°C
Момент трогания, Н×м
Значение
0,15
7000
0,006
0,8
1
3
0,1
0,002
Основные технические характеристики инкрементального оптического энкодера типа
TRD-S500VD:
Характеристика |
Значение |
Напряжение питания, В |
5 |
Тип выхода |
Квадратурный + Z-импульс |
Максимальная частота, кГц |
200 |
Разрешение, имп./об. |
500 |
Тип выхода/тип логического сигнала |
Линейный драйвер/положительная |
Снятие передаточной характеристики холостого хода UВЫХ0 = f(n) тахогенератора постоянного тока:
Таблица 1
n, об/мин |
237 |
560 |
910 |
1160 |
1450 |
1784 |
2078 |
2405 |
2820 |
2984 |
UВЫХ0, В |
1,35 |
3,1 |
5,1 |
6,5 |
8,1 |
10 |
11,7 |
13,5 |
15,8 |
16,7 |
Снятие передаточной характеристики UВЫХ = f(n) тахогенератора постоянного тока при нагрузке:
Таблица 2 R1 - max
|
n, об/мин |
237 |
553 |
880 |
1140 |
1443 |
1750 |
2136 |
2466 |
2785 |
2983 |
|
||||||||||
|
Uвых, В |
0,21 |
0,49 |
0,78 |
1 |
1,26 |
1,53 |
1,88 |
2,14 |
2,41 |
2,58 |
|
||||||||||
|
R4 - среднее |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n, об/мин |
|
187 |
|
536 |
|
880 |
|
1112 |
|
1437 |
|
1785 |
|
2078 |
|
2402 |
|
2749 |
|
2985 |
|
|
Uвых, В |
|
0,66 |
|
1,92 |
|
3,2 |
|
4 |
|
5,2 |
|
6,42 |
|
7,46 |
|
8,6 |
|
10 |
|
10,8 |
|
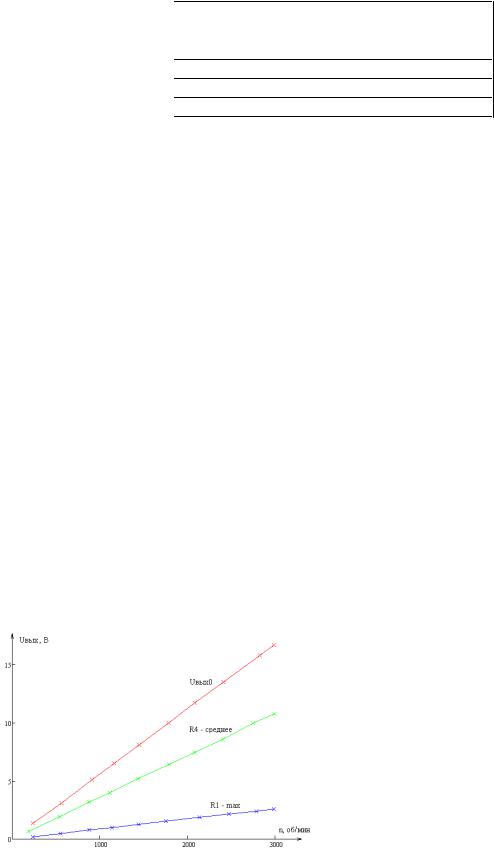
Зависимости UВЫХ0 = f(n) и UВЫХ = f(n) на одном графике:
2
Выводы:
Из графиков передаточной характеристики UВЫХ = f(n) холостого хода и при наличии нагрузки тахогенератора постоянного тока видно, что зависимости близки к линейным; с увеличением скорости вращения напряжение на выходе тахогенератора увеличивается.
С увеличением сопротивления нагрузки угол наклона передаточной характеристики уменьшается.
Часть2
Изучение датчиков углового положения
Цель работы:
1.Изучить режимы работы и основные характеристики инкрементального оптического энкодера, вращающегося трансформатора, работающего в синусно-косинусном режиме и потенциометрического датчика.
2.Овладеть методами экспериментального исследования данных устройств и определения точности преобразования угла поворота в электрический сигнал.
3.Сравнить экспериментальные характеристики с теоретическими и оценить погрешности.
4.Определить сравнительные качества синусных, косинусных обмоток синуснокосинусных трансформаторов.
5.Определить значения погрешностей потенциометрического датчика.
Основные технические характеристики инкрементального оптического энкодера типа
TRD-S500VD:
Характеристика |
Значение |
Напряжение питания, В |
5 |
Тип выхода |
Квадратурный + Z-импульс |
Максимальная частота, кГц |
200 |
Разрешение, имп./об. |
500 |
Тип выхода/тип логического сигнала |
Линейный драйвер/положительная |
Основные технические характеристики вращающегося трансформатора типа 2,5ВТ:
|
Характеристика |
Показатель |
||
Тип |
|
|
2,5 ВТ ЛШ3 010.399 |
|
Назначение |
|
|
СКВТ |
|
Погрешность следования трансформаторной |
±5 |
|||
дистанционной передачи, угл. мин. |
||||
|
||||
Напряжение |
|
Номинальное |
27 |
|
|
Рабочий диапазон |
0-27 |
||
|
|
|||
Номинальная частота напряжения возбуждения, Гц |
400 |
|||
3

Z01, Ом |
1600 |
|
Диапазон рабочих частот напряжения возбуждения, Гц |
380 |
– 1050 |
Частота вращения вала, об/мин |
5 |
– 20 |
Основные технические характеристики потенциометрического датчика положения типа ПТП11:
Характеристика |
Значение |
Мощность, Вт |
1 |
Номинальное сопротивление, к Ом |
2 |
Тип |
Многооборотный проволочный |
Функциональная зависимость |
линейная |
Снятие передаточной характеристики N = f(α) инкрементального оптического
энкодера:
Таблица 1
α, град |
0 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
360 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N, число |
0 |
168 |
335 |
496 |
666 |
822 |
999 |
1163 |
1331 |
1503 |
1672 |
1826 |
2000 |
импульсов |
Зависимость N = f(α):
N0 = N / α ≈ 2000 / 360 = 5,6
4
Снятие характеристики холостого хода Usin = f(α) для синусной обмотки:
Таблица 2
α, град |
0 |
28,6 |
54,3 |
58,6 |
88,9 |
120 |
150 |
180 |
211,6 |
242 |
272 |
301 |
329,7 |
360 |
|
Usin, |
5,38 |
2,89 |
0 |
0,53 |
3,79 |
6,13 |
6,67 |
5,39 |
2,61 |
0,96 |
4,11 |
6,13 |
6,67 |
5,57 |
|
В |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Δα = αmin = 54,3 град
α, |
-54,3 |
-25,7 |
0 |
4,3 |
34,6 |
65,7 |
95,7 |
125,7 |
157,3 |
187,7 |
217,7 |
246,7 |
275,4 |
305,7 |
|
град |
|||||||||||||||
Usin, |
5,38 |
2,89 |
0 |
0,53 |
3,79 |
6,13 |
6,67 |
5,39 |
2,61 |
0,96 |
4,11 |
6,13 |
6,67 |
5,57 |
|
В |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
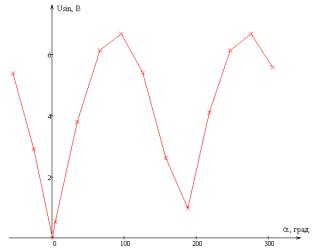
Зависимость Usin = f(α):
Снятие характеристики холостого хода Ucos = f(α) для косинусной обмотки:
Таблица 3
|
α, |
0 |
30 |
59,4 |
|
92,1 |
122,7 |
149,4 |
|
181,2 |
212,7 |
241,7 |
271,6 |
303,4 |
|
330,6 |
359,8 |
|
||||||||||||||||||
|
град |
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ucos, |
3,62 |
5,92 |
6,68 |
|
5,51 |
2,81 |
|
0,21 |
|
|
3,69 |
6,07 |
6,66 |
5,55 |
2,75 |
|
|
0,29 |
|
3,5 |
|
||||||||||||||
|
В |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Δα = αmin = 149,4 – 90 = 59,4 град |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
α, град |
|
-59,4 |
|
-29,4 |
|
0 |
32,7 |
|
63,3 |
|
90 |
|
|
121,8 |
153,3 |
182,3 |
212,2 |
244 |
|
|
271,2 |
|
300,4 |
|||||||||||||
Ucos, В |
|
3,62 |
|
5,92 |
6,68 |
5,51 |
|
2,81 |
|
0,21 |
|
3,69 |
6,07 |
6,66 |
5,55 |
2,75 |
|
0,29 |
|
3,5 |
||||||||||||||||
5
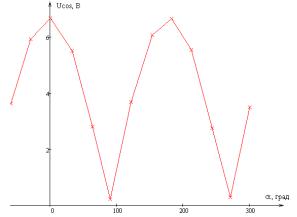
Зависимость Ucos = f(α):
Снятие характеристик синусной обмотки при нагрузке:
Таблица 4
α, град |
0 |
30 |
|
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
330 |
360 |
U’sin, В |
3,71 |
1,72 |
|
0,26 |
2,24 |
4,15 |
4,67 |
3,56 |
1,61 |
0,31 |
2,14 |
4,23 |
4,66 |
3,69 |
Δα = αmin = 60 град |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α, град |
-60 |
-30 |
|
0 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
300 |
U’sin, В |
3,71 |
1,72 |
|
0,26 |
2,24 |
4,15 |
4,67 |
3,56 |
1,61 |
0,31 |
2,14 |
4,23 |
4,66 |
3,69 |
Usin, В |
5,78 |
3,34 |
|
0 |
3,34 |
5,78 |
6,67 |
5,78 |
3,34 |
0 |
3,34 |
5,78 |
6,67 |
5,78 |
Uвых, |
2,07 |
1,63 |
|
0,26 |
1,10 |
1,63 |
2,00 |
2,22 |
1,73 |
0,31 |
1,20 |
1,55 |
2,01 |
2,09 |
В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uвых%, |
31 |
24 |
|
4 |
16 |
24 |
30 |
33 |
26 |
5 |
18 |
23 |
30 |
31 |
% |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Здесь:
Usinm ≈ 6,67 B
Usin = Usinm × sinα
Uвых = U’sin – Usin
Uвых% = Uвых / Usinm × 100%
6
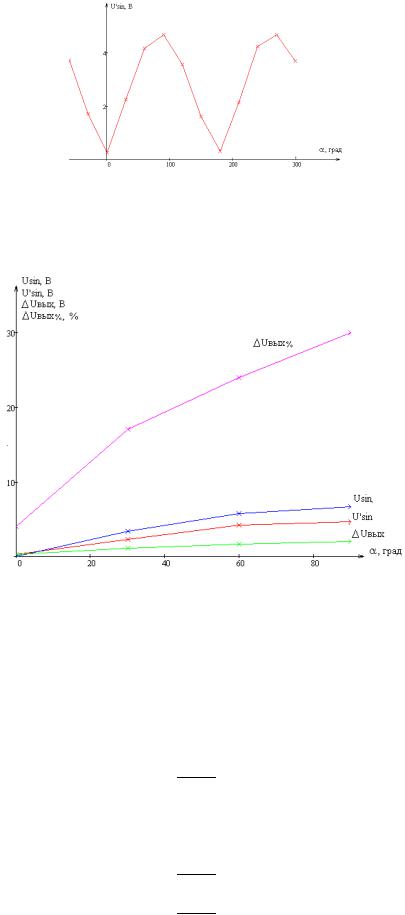
Зависимость U’sin = f(α):
Зависимости {U’sin, Usin, Uвых, Uвых%} = f(α) в диапазоне α = 0 ÷ 90°:
Снятие характеристик косинусной обмотки при нагрузке:
Таблица 5
α, град |
0 |
30 |
60 |
|
90 |
120 |
150 |
|
180 |
210 |
240 |
270 |
300 |
330 |
360 |
U’cos, В |
1,96 |
3,95 |
4,67 |
|
3,83 |
1,71 |
0 |
|
1,95 |
4,16 |
4,67 |
3,75 |
1,59 |
0 |
1,83 |
Δα = αmin = 150 – 90 = 60 град |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
90 |
|
|
|
|
|
|
|
|
α, град |
-60 |
-30 |
0 |
|
30 |
60 |
|
120 |
150 |
180 |
210 |
240 |
270 |
300 |
|
U’cos, В |
1,96 |
3,95 |
4,67 |
|
3,83 |
1,71 |
0 |
|
1,95 |
4,16 |
4,67 |
3,75 |
1,59 |
0 |
1,83 |
Ucos, В |
3,34 |
5,79 |
6,68 |
|
5,79 |
3,34 |
0 |
|
3,34 |
5,79 |
6,68 |
5,79 |
3,34 |
0 |
3,34 |
Uвых, |
1,38 |
1,84 |
2,01 |
|
1,96 |
1,63 |
0 |
|
1,39 |
1,63 |
2,01 |
2,04 |
1,75 |
0 |
1,51 |
В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uвых%, |
21 |
28 |
30 |
|
29 |
24 |
0 |
|
21 |
24 |
30 |
31 |
26 |
0 |
23 |
% |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7
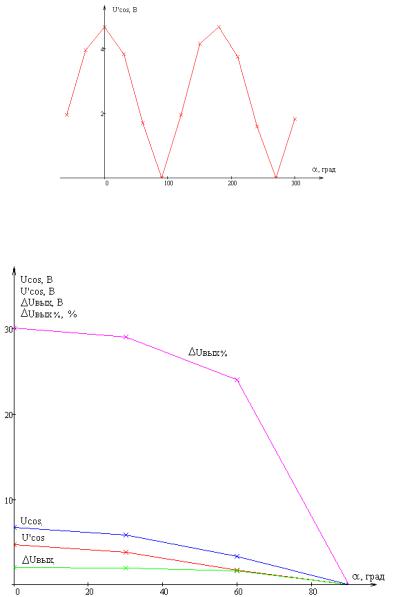
Здесь:
Ucosm = 6,68 B
Ucos = Ucosm × cosα
Uвых = U’cos – Ucos
Uвых% = Uвых / Ucosm × 100%
Зависимость U’cos = f(α):
Зависимости {U’cos, Ucos, Uвых, Uвых%} = f(α) в диапазоне α = 0 ÷ 90°:
8
Снятие характеристики холостого хода UВЫХ0 = f(α) потенциометрического датчика
угла поворота:
Таблица 8
α, |
0 |
30 |
61,3 |
93,2 |
123,4 |
153,9 |
183,6 |
215,2 |
242,1 |
272,7 |
304 |
331,3 |
358 |
|
град |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
UВЫХ0, |
4,72 |
0 |
0,27 |
0,75 |
1,18 |
1,62 |
2,07 |
2,52 |
2,93 |
3,4 |
3,89 |
4,29 |
4,7 |
|
В |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
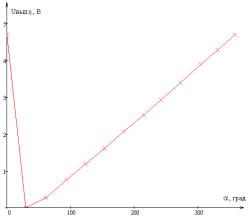
Зависимость UВЫХ0 = f(α): |
|
|
|
|
|
|
|
|
|
|||||
Выводы:
Передаточная характеристика N = f(α) инкрементального оптического энкодера имеет вид, близкий к линейному; при увеличении угла поворота число импульсов увеличивается.
Характеристика холостого хода для синусной обмотки и характеристика синусной обмотки при нагрузке имеют вид, близкий к синусоиде.
Характеристика холостого хода для косинусной обмотки и характеристика косинусной обмотки при нагрузке имеют вид, близкий к косинусоиде.
Характеристика холостого хода UВЫХ0 = f(α) потенциометрического датчика угла поворота представляет собой сложную зависимость.
9