

МИНЕСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОЛВАТЕЛДЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗРОВАНИЯ
«НИЖЕГОРОДСКИЙ ГОСУДАРТТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ им. Р.Е. АЛЕКСЕЕВА» НГТУ
Кафедра «Кораблестроение и авиационная техника»
Реферат
По дисциплине «Основы кораблестроения»
ТАНКЕР ТИПА СЕВЕР-МАКС
Выполнил Угулава Р.Г.
Группа 17-КС-1
Проверил Зуев В.А.
Нижний Новгород, 2020
Содержание
Y
Введение 2
1. Характеристики гребного винта 3
1.1. Основные геометрические характеристики гребного винта 3
1.2. Кинематические характеристики гребного винта 5
1.3. Гидродинамические характеристики гребного винта. 6
2. Гидродинамическое взаимодействие винта и корпуса судна. 8
3. Кавитация гребных винтов 11
3.1. Понятие кавитации и ее виды 11
3.2. Способы борьбы с кавитацией 11
4. Расчет гребных винтов 13
4.1. Расчет элементов движительного комплекса при выборе главной энергетической установки 13
Заключение 20
Список литературы 22
Введение
Проектирование гребных винтов транспортных судов, как правило, сводятся к выбору оптимального винта. При этом он должен обладать необходимой прочностью и удовлетворять условию отсутствия негативных последствий кавитации. В случае, когда требуется обеспечить судну заданную скорость, оптимальность винта означает минимальную мощность механической установки. Если заданы характеристики двигателя, оптимальный винт позволяет судну двигаться с наибольшей скоростью. [1]
Все задачи, связанные с проектированием гребного винта, в том числе и оптимального, эффективно могут решаться с помощью диаграмм для расчета гребных винтов. Пример такой диаграммы представлен на рисунке 1.
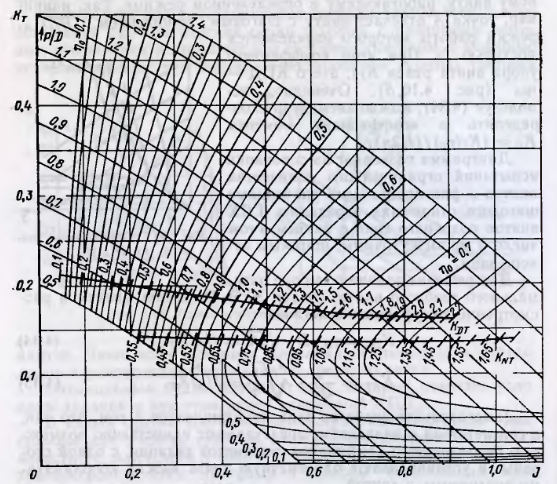
Рисунок 1 – диаграмма для расчета гребных винтов (z=4, θ=0.55)
Исходной информацией для расчетов являются известные геометрические элементы гребного винта: Dmax, z, θ и характеристики взаимодействия ᴪ, t, σ. Практически все многообразие заданий на проектирование гребных винтов можно свести к четырем основным типам, для каждого из которых используется своя расчетная схема. [1]
Характеристики гребного винта
Основные геометрические характеристики гребного винта
Винт состоит из ступицы и лопастей, являющихся его рабочими элементами. За счет разницы давлений на засасывающей, обращенной в сторону движения, и нагнетающей, воспринимающей реакцию отброшенных масс воды, поверхностях лопастей создается упор гребного винта.
Лопасть – крылообразное иело, создаваемое винтовыми поверхностями, линия пересечения которых называется контуром.
Как и у крыла, у лопасти различают две кромки – входящую, направленную на встречу потоку, и выходящую –противоположной первой. Граница между ними - край лопасти – самая удаленная от оси точка гребного винта. Участок, примыкающий к ступице, называется корнем лопасти.
Заставим отрезок АВ двигается таким образом, чтобы один его конец – точка А – скользил по оси цилиндра, а другой – точка В – по его поверхности, одновременно вращаясь вокруг оси. Образованная таким образом поверхность носит название винтовой (рисунок 1.1). Если скорости,
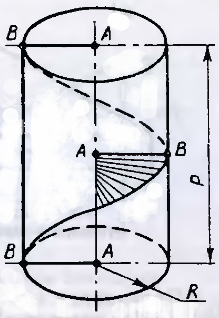
Рисунок 1.1 – образование винтовой поверхности
поступательная и окружная, будут при этом постоянными, то образуется правильная винтовая поверхность. Точка В на боковой поверхности цилиндра опишет винтовую линию, шагом которой называется расстояние Р, проходимое этой точкой в осевом направлении за один оборот.
Рассекая винтовую поверхность соосными цилиндрами, на каждом из них получим винтовую линию – след движения соответствующей точки отрезка АВ. Следовательно, винтовую поверхность можно определить, как совокупность бесконечного множества винтовых линий, описанных точками отрезка АВ. Сам этот отрезок называется образующей винтовой поверхности. Он в общем случае может быть наклонен к оси цилиндра, иметь криволинейную форму.
Разворачивая боковую поверхность цилиндра на плоскость, получим прямоугольник, в котором винтовая линия является диагональю. Нижняя половина этого прямоугольника называется шаговым треугольником: его катеты равны длине окружности и шагу Винтовой линии. Если гипотенуза такого треугольника прямолинейная (рис. 1.1, а), то винтовая линия называется винтовой линией постоянного шага, при этом шаговый угол
 Криволинейная
гипотенуза — признак винтовой линии
переменного шага
Криволинейная
гипотенуза — признак винтовой линии
переменного шага
 ,
где
,
где
 — угол поворота образующей относительно
оси цилиндра.
— угол поворота образующей относительно
оси цилиндра.
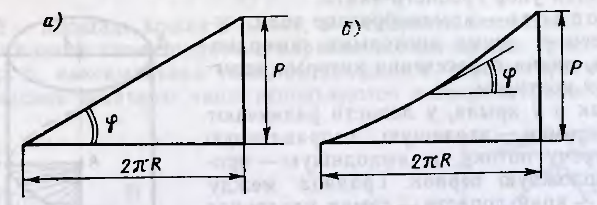
Рисунок 1.2 – Шаговый треугольник:
а – винтовая линия постоянного шага; б – винтовая линия переменного шага
Правильная
винтовая поверхность на всех радиусах
в сечении имеет винтовые линии постоянного
шага, кроме того соблюдается и условие
 const.
Если же поверхность образована винтовыми
линиями постоянного шага, но
const.
Если же поверхность образована винтовыми
линиями постоянного шага, но
 ,
то это винтовая поверхность
радиально-переменного шага. Различают
еще винтовую поверхность аксиально-переменного
шага — шаговые треугольники имеют
криволинейные гипотенузы (
,
то это винтовая поверхность
радиально-переменного шага. Различают
еще винтовую поверхность аксиально-переменного
шага — шаговые треугольники имеют
криволинейные гипотенузы ( ),
но один и тот же средний шаг
const.
Если
и
,
то такая поверхность называется винтовой
поверхностью аксиально-радиально-переменного
шага.
),
но один и тот же средний шаг
const.
Если
и
,
то такая поверхность называется винтовой
поверхностью аксиально-радиально-переменного
шага.
Лопасти гребных винтов образуются винтовыми поверхностями всех перечисленных типов. Так, если нагнетающая поверхность лопасти может быть правильной, то засасывающая всегда имеет в сечении винтовую линию переменного шага.
Рассекая лопасть гребного винта соосным с ним цилиндром и разворачивая его на плоскость, получаем профиль сечения лопасти, шаг и шаговый угол на данном радиусе (рис. 1.3).
Винтовая поверхность без искажений не разворачивается на плоскость. Наиболее точное представление о форме и площади лопасти дает так называемый спрямленный контур, построение которого осуществляется известными методами графики.
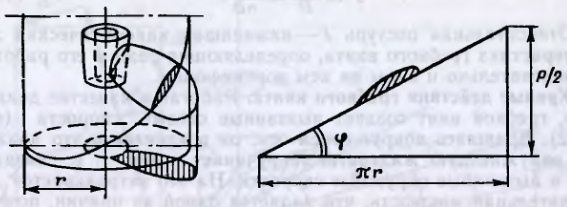
Рисунок 1.3 – Сечение лопасти гребного винта соосным цилиндром
Основные
геометрические характеристики гребного
винта — число лопастей, диаметр, шаг,
диаметр ступицы, форма профиля лопасти,
площадь ее спрямленной поверхности.
Современные гребные винты имеют диаметр
до D
= 12 м, масса такого движителя может
достигать 150 т. Число лопастей винтов
изменяется в пределах
 .
.
На ряду с диаметром гребной винт характеризуют его безразмерные геометрические характеристики. К ним относятся:
-
дисковое отношение
 ,
где
,
где
 – площадь спрямленной поверхности всех
лопастей;
– площадь спрямленной поверхности всех
лопастей;
 – площадь диска (гидравлического
сечения) гребного винта;
– площадь диска (гидравлического
сечения) гребного винта;
 (большие значения относятся к винтам
быстроходных судов);
(большие значения относятся к винтам
быстроходных судов);
-
шаговое отношение P/D,
где P
– шаг; D
– диаметр винта,
 (большие значения – винты быстроходных
судов);
(большие значения – винты быстроходных
судов);
-
относительный диаметр ступицы
 (большие значения характерны для ВРШ и
винтов со съемными лопастями).
(большие значения характерны для ВРШ и
винтов со съемными лопастями).
Если относительно наблюдателя, смотрящего в корму удаляющегося судна, гребной винт вращается по часовой стрелке, то его называют винтом правого вращения, в противном случае — винтом левого вращения [1].