

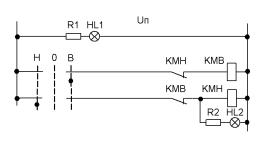
Защитные блокировки предотвращают ложные срабатывания в схеме и защищают двигатели, механизмы, а иногда и операторов от неправильных действий. Примером может служить применяемые в схемах блокировки реверсивных контакторов (рис. 1.23), или линейных и тормозных контакторов, исключающие одновременные ложные включения контакторов. К защитным блокировкам относятся путевые блокировки, ограничивающие движение механизмов и защищающие их от поломки (например, предотвращают подъем крюка подъемного крана выше заданного положения), и блокировки, защищающие оператора от его неправильных действий (например, невозможность работы на точильном станке при поднятом защитном стекле).
Рис.1.23. Пример защитной блокировки и сигнализации
Сигнализация, применяемая в схемах электроприводов, разделяется на контрольную, технологическую и аварийную. Контрольная сигнализация служит для контроля наличия того или иного сигнала или напряжения питания (лампа HL1 на рис. 1.23), и истинного состояния включающих и отключающих аппаратов. Технологическая сигнализация указывает последовательность операций, совершаемых схемой электропривода, например, движение механизма вперед или назад (лампа HL2 на рис.1.23), включенное или отключенное состояние аппаратов и т.д. Аварийная сигнализация указывает аварийное состояние схемы или действия той или иной защиты в схеме. Сигнализация выполняется световой (лампы, световые табло), звуковой (звонок, сирена), и визуальной (указательные реле).
ГЛАВА 2. РЕГУЛИРОВАНИЕ КООРДИНАТ ЭЛЕКТРОПРИВОДА
Электропривод осуществляет не только преобразование электрической энергии в механическую, необходимую для совершения полезной работы, но и управление рабочим процессом приводимого в
48