

В процессе приема сигнала неизбежно возникает необходимость в его очистке от посторонних воздействий канала связи
.docxВ процессе приема сигнала неизбежно возникает необходимость в его очистке от посторонних воздействий канала связи, например, случайных или преднамеренных помех. Одна из особенностей, отличающих использование антенных решеток для приема сигнала, заключается не только в возможности избирательного приема или передачи на заданных направлениях, но и в использовании избыточности для восстановления передаваемой информации, а также подавления помех от направлений, не совпадающих с направлением исходного сигнала.
В
настоящее время для борьбы с посторонними
воздействиями в канале связи широкое
распространение нашли методы адаптивной
фильтрации сигналов. Сущность адаптивного
фильтра заключается в изменении в
процессе работы параметров, которые
зависят от критерия работы адаптивного
фильтра. Это производится путем достижения
минимума целефой функции, например
квадратичной функции ошибки между
принятыми и требуемым сигналом. В таком
случае выходной сигнал адаптивного
фильтра
 становится близок к требуемому на выходе
сигналу
становится близок к требуемому на выходе
сигналу
 в той мере, которая достаточна для
нормального приема информации или
работы устройства.
в той мере, которая достаточна для
нормального приема информации или
работы устройства.
Для
приближения выходного сигнала к желаемому
используется метод пересчёта весовых
коэффициентов фильтра
 ,
которые рассчитываются на основе
обработки входного сигнала фильтра
,
которые рассчитываются на основе
обработки входного сигнала фильтра
 и
.
Поскольку состояние фильтра меняется
в ходе перерасчета весовых коэффициентов,
то такой фильтр и называется адаптивным.
и
.
Поскольку состояние фильтра меняется
в ходе перерасчета весовых коэффициентов,
то такой фильтр и называется адаптивным.
В
общем виде одноканальный дискретный
адаптивный фильтр представляет собой
фильтр с конечной импульсной характеристикой
(КИХ), который применяется к совокупности
 отсчетов входного сигнала
на каждом шаге дискретизации. На выходе
получается отсчет выходного сигнала
,
который затем сравнивается с требуемым
сигналом
.
Обычно для этого производится вычисление
сигнала ошибки
отсчетов входного сигнала
на каждом шаге дискретизации. На выходе
получается отсчет выходного сигнала
,
который затем сравнивается с требуемым
сигналом
.
Обычно для этого производится вычисление
сигнала ошибки
 :
:
|
(1) |

Параллельно процессу вычисления выходного сигнала производится постоянный перерасчет весовых коэффициентов внутри выбранного алгоритма адаптации, на вход которого поступают и . Стоит отметить, что не всегда возможно использование входного сигнала в качестве , поэтому требуемый сигнал необходимо выбрать, исходя из требуемого приложения фильтра.
На рисунке 1 показана структурная схема адаптивного фильтра.

Рисунок 1 – Структурная схема адаптивного фильтра
Применительно к антенной решетке схем адаптивного фильтра будет иметь несколько каналов, число которых равно числу элементов антенной решетки.
Пример такой структуры приведен на рисунке 2

Рисунок 2 – Структурная схема адаптивного фильтра ФАР
В основе адаптивных фильтров лежат несколько различных алгоритмов, отличающихся различными параметрами, наиболее важными из которых являются скорость сходимости (минимизации ) до допустимого уровня, вычислительная сложность (зависимость числа операций, выполняемых на каждом шаге фильтра, от его параметров, например числа весовых коэффициентов), значение остаточных ошибок, характеризующее точность нахождения оптимальной комбинации весовых коэффициентов для максимального соответствия выходного сигнала требуемому.
Перед рассмотрением алгоритмов адаптации цребуется провести обзор оптимальных алгоритмов фильтра, к которым данные алгоритмы должны стремиться. Одной из таких моделей оптимальной фильтрации является фильтр Винера, основанный на определении и устранении корреляционных связей между входным и требуемым сигналом. [http://images.nature.web.ru/nature/2003/04/11/0001193683/06.pdf] Рассматриваемые в данной работе алгоритмы являются, в сущности, лишь приближением к идеальной модели фильтра Винера.
1) Метод наименьших квадратов (Least Mean Square, LMS)
Одним из наиболее простых и широко используемых методов адаптации является метод наименьших квадратов, основанный на нахождении минимума целевой функции методом наискорейшего спуска. Для этого производится рекурсивное вычисление весовых коэффициентов на каждом шаге:
|
(2) |

где
 коэффициент
шага;
коэффициент
шага;
 вектор взаимных
корреляций между k-ым
отсчетом требуемого сигнала и содержимым
линии задержки КИХ-фильтра;
вектор взаимных
корреляций между k-ым
отсчетом требуемого сигнала и содержимым
линии задержки КИХ-фильтра;
 корреляционная
матрица сигнала, имеющая размерность
(N+1)x(N+1),
где N
– число отсчетов фильтра.
корреляционная
матрица сигнала, имеющая размерность
(N+1)x(N+1),
где N
– число отсчетов фильтра.
Данный
алгоритм сходится в том случае, если
 , где
, где = максимальное собственное число R.
Стоит отметить, что для расчета градиента
по данному алгоритму требуется знать
значения
= максимальное собственное число R.
Стоит отметить, что для расчета градиента
по данному алгоритму требуется знать
значения
 и
и
 на каждом шаге, но фактически в большинстве
применений доступны лишь оценки данных
значений:
на каждом шаге, но фактически в большинстве
применений доступны лишь оценки данных
значений:
|
(3) |
|
(4) |


В результате подстановки (3) и (4) в (2) получается следующая формула расчета w(k):
|
(5) |

Данное
выражение требует всего лишь N+1
операций типа «умножение+сложение»,
доступных практически в любом устройстве
цифровой обработки сигналов и имеющих
высокое быстродействие, в результате
чего данный алгоритм и получил наибольшее
распространение. Вместе с тем, имеется
и серьезный недостаток в лице медленной
сходимости решения алгоритма и высокая
дисперсия ошибки выходного сигнала
 .
Существует большое число модификаций
алгоритма, которые улучшают те или иные
его аспекты. Например, возможно полностью
избавиться от операций умножения,
используя только знаки
.
Существует большое число модификаций
алгоритма, которые улучшают те или иные
его аспекты. Например, возможно полностью
избавиться от операций умножения,
используя только знаки
 ,
либо, путем декорреляции отсчетов
входного сигнала улучшить сходимость
алгоритма. Тем не менее, классическая
реализация LMS-метода
до сих пор применяется во множестве
устройств, требующих адаптивной обработки
сигналов.
,
либо, путем декорреляции отсчетов
входного сигнала улучшить сходимость
алгоритма. Тем не менее, классическая
реализация LMS-метода
до сих пор применяется во множестве
устройств, требующих адаптивной обработки
сигналов.
2) Рекурсивный метод наименьших квадратов (Recursive Least Square, RLS)
В
основе данного метода лежит метод
пересчета весовых коэффициентов с
использованием истории содержимого
линии задержки, хранящейся в матрице
 ,
где
,
где
 – вектор-столбец содержимого линии
задержки входного и сигнала
– вектор-столбец содержимого линии
задержки входного и сигнала
 на k-том
такте. В таком случае, следуя расчетам
из
[http://images.nature.web.ru/nature/2003/04/11/0001193683/06.pdf],
весовые коэффициенты возможно найти
по следующей формуле:
на k-том
такте. В таком случае, следуя расчетам
из
[http://images.nature.web.ru/nature/2003/04/11/0001193683/06.pdf],
весовые коэффициенты возможно найти
по следующей формуле:
|
(6) |

где P – обратная корреляционная матрица входного сигнала.
Однако
необратимый рост размерности матрицы
U
приведет к практической невозможности
реализации данного алгоритма на реальном
оборудовании, поэтому для ускорения
используется следующее свойство: на
каждом отсчете к матрице U
добавляется лишь один новый столбец, а
к вектору требуемого сигнала
 – только один новый элемент. Таким
образом, возможно организовать рекурсивное
вычисление оценки обратной корреляционной
матрицы
– только один новый элемент. Таким
образом, возможно организовать рекурсивное
вычисление оценки обратной корреляционной
матрицы
 .
.
В сущности, рекурсивный метод наименьших квадратов состоит из следующих шагов:
а)
На каждом новом отсчете сигнал фильтруется
с использованием текущих весовых
коэффициентов
 ,
затем вычисляется величина ошибки:
,
затем вычисляется величина ошибки:
|
(7) |
|
(8) |


б) Производится расчет вектора-столбца коэффициентов усиления:
|
(9) |

в) Обновляется оценка обратной корреляционной матрицы сигнала:
|
(10) |

г) Рассчитываются новые весовые коэффициенты фильтра:
|
(11) |

Начальное
значение w
обычно устанавливается нулевым, а
исходная матрица P
имеет вид диагональной матрицы
 ,
где C
>> 1.
,
где C
>> 1.
Для того, чтобы улучшить статистические свойства фильтра, применяется экспоненциальное забывание, приводящее к уменьшению веса предыдущих значений сигнала ошибки. В таком случае формулы (9) и (10) имеют вид:
|
(12) |
|
(13) |


Данный алгоритм обладает очень быстрой, по сравнению с LMS-алгоритмом, сходимостью, но за это приходится расплачиваться высокой вычислительной сложностью алгоритма, в среднем близкой к O(N2), что ограничивает применение RLS-алгоритмов в системах реального времени. Тем не менее, их целесообразно применять для начальной настройки фильтра на известный сигнал или в случае, когда допустим пересчет весовых коэффициентов фильтра со скоростью, много меньшей собственно скорости вычисления выходного сигнала фильтра.
Существуют более продвинутые алгоритмы, например, на основе QR-разложения или алгоритм Калмана, однако их недостаточная изученность и в целом высокая вычислительная сложность мешает их постепенному внедрению. В итоге LMS-алгоритмы за счет своей простоты и быстрлодействия оказываются наиболее предпочтительными и в современной аппаратуре, несмотря на медленную сходимость.
Алгоритм корегатора
При использовании антенной решетки каждый её элемент принимает один и тот же сигнал с точностью до шума в канале связи, но со смещением во времени, обусловленным разностью хода волны. В то же время для дальнейшей обработки сигнала требуется наличие ровно одной его копии. Для её получения возможно использование специальных устройств и алгоритмов, называемых когераторами. Эти устройства получают на выходе когерентную сумму сигналов антенн, имеющих между собой произвольные фазовые сдвиги, при этом устраняя посторонние помехи, таким образом увеличивая устойчивость принимаемого сигнала к внешним воздействиям.
На рисунке 3 приведен пример когератора для трех каналов, но общий принцип можно обобщить для произвольного их числа.
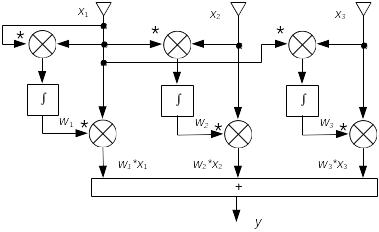
Рисунок 3 – Когератор с использованием одного из каналов в качестве опорного
В данном примере опорным является канал x1. Сигнал каждого из каналов перемножается с сопряженным сигналом опорного канала, затем производится вычисление веса данного канала, который затем снова перемножается с сигналом. После чего вычисляется сумма результатов каждого канала, которая и будет представлять собой сигнал на выходе когератора.
В дискретной форме данное устройство можно реализовать путем выборки N отсчетов каждого канала и оформления их в виде матрицы X:

строки
которых соответствуют одному отсчету
времени, а столбцы – одному каналу. Веса
всех каналов можно обозначить вектором
 .
В таком случае выходной сигнал можно
описать следующим выражением:
.
В таком случае выходной сигнал можно
описать следующим выражением:

, где символ * означает комплексное сопряжение и транспонирование.
Существуют также другие модификации когератора, основанные на рекуррентном расчете матрицы корреляции входного сигнала, которые также возможно исполнять параллельно. [ссылка на статью про когератор]