

Лекц / 2020.06.24 v02 Текст лекции
.pdf1.УПРАВЛЕНИЕ С ОБРАТНОЙ СВЯЗЬЮ
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
.М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
рис. 1.1. Древние водяные часы (клепсидра). Автор рисунка слева немецкий классицист |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Герман Дильса (Hermann Diels) |
|
|
|
|
|
|
|
||||||
|
|
|
Древние водяные часы (рис. 1.1) |
считаются самыммдревним известным устройством |
|
|
|||||||||||||||||
|
|
|
|
|
|
обладающим системой регулирования с обратнойи |
связью. Часы были изобретены |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в |
третьем веке до нашей эры |
греческим) |
механиком |
Ктесибием |
(Ktesibios), |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
работающим в Александрии [2]. Индикатор времени закреплен на поплавке, |
|
|
|||||||||||||||
|
|
|
|
|
|
который поднимается вместе с уровнем воды в ёмкости. Справа наверху |
|
|
|||||||||||||||
|
|
|
|
|
|
установлен |
барабан с |
12-часовым циферблатом и кривыми линиями, |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
учитывающими зависимость длительности часа от продолжительности светового |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
дня в различное время годаН. У древних греков длительность часа зависела от |
|
|
|||||||||||||||
|
|
|
|
|
|
времени года. Слева н верху установлен регулятор подачи воды с обратной |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
связью. В зависимости от расхода в линии питания уровень в верхнем левом баке |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
изменялся. Если входной расход был слишком большим, то уровень увеличивался |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и поплавок прикрывал входной поток. В обратном случае, поплавок открывал вход |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и увеличивал входной расход. Таким образом, поддерживался постоянным |
|
|
|||||||||||||||
|
|
|
|
|
|
уровень в резервуаре и расход на выходе, который определял скорость подъёма |
|
|
|||||||||||||||
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
поплавка с ндикатором времени. При переполнении резервуар опустошался |
|
|
|||||||||||||||
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
через с фонное устройство и с помощью зубчатого колеса вращал циферблат на |
|
|
|||||||||||||||
|
|
|
|
|
|
1/360 (в греческом календаре было 360 дней). |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
История развития применения механизма обратной связи для управления в технических |
|
|
||||||||||||||||||
|
|
|
Все |
системах с интересными примерами изложена в книге [2]. |
|
|
|
|
|
|
|
||||||||||||
|
|
н |
|
биологические |
организмы |
имеют |
многочисленные системы регулирования с |
|
|
||||||||||||||
|
У |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
обратной связью вследствие универсальности данного механизма. Сам термин |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
Г |
|
|
|
|
«обратная связь» придуман радиолюбителями в начале 20 века, а |
одним из |
|
|
|||||||||||||||
|
|
|
|
первопроходцев в осмыслении широты применения данного механизма в |
|
|
|||||||||||||||||
Р |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
различных сферах был Н. Винер [4]. |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
В |
|
1930-х |
годах появляются теоретические работы по управлению процессом и |
|
|
||||||||||||||||
|
|
|
|
|
коммерческие ПИД-регуляторы с обратной связью (3). |
Пневматические ПИД- |
|
|
|||||||||||||||
регуляторы получили широкое внедрение в промышленности в 1940-х годах, а их электронные аналоги появились в 1950-х годах. Первые компьютерные приложения управления в обрабатывающей промышленности были опубликованы
1
2020 г., РГУ нефти и газа (НИУ) имени И.М. Губкина, каф. АТП, Барашкин Роман Леонардович
в конце 1950-х и начале 1960-х годов. С 1980-х годов цифровое оборудование широко используется в различных отраслях промышленности для управления технологическими процессами.
|
|
|
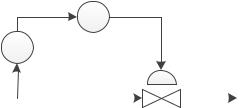
На |
рис. 1.2 приведена |
система автоматического регулирования расхода с обратной |
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
связью. |
Датчик |
измеряет текущий |
расход и |
|
подаёт сигнал |
с измерением на |
|
н |
|||||||||||||||||||||||
|
|
|
|
|
регулятор расхода. Регулятор сравнивает текущее измеренное значение расхода с |
|
|
а |
||||||||||||||||||||||||||||
|
|
|
|
|
заданным, вырабатывает сигнал |
управляющего |
воздействия |
и подаёт |
его на |
и |
||||||||||||||||||||||||||
|
|
|
|
|
регулирующий клапан. |
Регулирующий клапан изменяет положение штока и тем |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
|
|
|
|
|
|
самым |
воздействует |
на |
|
расход. |
Цикл |
|
регулирования |
с |
обратной |
связью |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
непрерывно |
повторяется |
стремясь текущее |
|
|
значение |
расхода |
привести |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
заданному значению. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FC |
|
|
|
|
|
|
|
|
.М |
Г |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Регулятор расхода |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
Расходомер |
|
FT |
|
|
|
|
|
|
. |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
(Flow controller) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
(Flow transmitter) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Регулирующий |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
клапан |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Входной |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
поток |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
рис. 1.2. Система автоматического регулирования расходаис обратной связью |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2. |
РЕГУЛЯТОРЫ С ОБРАТНОЙ СВЯЗЬЮ |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
2.1. |
Пропорциональный регулятор |
|
) |
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
Целью регулятора |
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
с отрицательной обратной связью является снижение сигнала |
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
рассогласования до нуля: |
|
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
– сигнал рассогласования, |
|
– заданное значение регулируемого параметра, |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
– текущее значение(регулируемого параметра. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
У |
пропорционального регулятора |
(П-регулятор) |
|
выход |
( |
|
|
– |
manipulated |
variable) |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пропорцион лен сигналу рассогласования |
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2) |
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
– значение выхода регулятора в установившемся состоянии процесса, |
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
называемое |
смещением, |
|
– |
коэффициент |
усиления |
пропорционального |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
регулятора. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
При настройке П-регулятора подбирают коэффициент усиления |
, |
обеспечивающий |
|
|
|
||||||||||||||||||||||||||||
|
|
|
е |
необходимую чувствительность выхода регулятора для снижения разницы между |
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
фзаданным и текущим значением регулируемого параметра. А также выбирается |
|
|
|
|||||||||||||||||||||||||||||
|
У |
|
|
знак коэффициента |
усиления |
, |
увеличивающий или |
уменьшающий |
выход |
|
|
|
||||||||||||||||||||||||
Г |
н |
|
регулятора при увеличении сигнала рассогласования. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
Величина смещения |
|
подбирается таким образом, |
чтобы на номинальном значении |
|
|
|
|||||||||||||||||||||||||||||
Р |
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
регулируемого параметра величина рассогласования была равна нулю. |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
В |
регуляторах |
общего |
назначения коэффициент усиления является безразмерной |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
величиной, т.к. сигнал рассогласования и выход регулятора нормируют к |
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
диапазону от 0 до 100% с целью удобства эксплуатации. Но в некоторых случаях |
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
коэффициент |
усиления может |
иметь |
|
размерность, например, |
если |
выход |
|
|
|
||||||||||||||||||||||
2
2020 г., РГУ нефти и газа (НИУ) имени И.М. Губкина, каф. АТП, Барашкин Роман Леонардович

|
|
|
|
регулятора рассчитывается в [мА], а рассогласование в [°C], то размерность |
|
|
|
|||||||||||||||||||
|
|
|
|
коэффициента усиление будет [мА/°C]. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
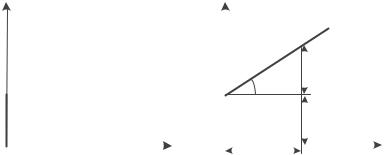
Идеальный П-регулятор имеет зависимость выхода от входа, приведенную на рис. 2.1, |
|
|
|
|||||||||||||||||||||
|
|
|
|
когда выход может неограниченно изменяться в зависимости от сигнала ошибки. |
|
|
а |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
MV |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tg(α) = Kc |
|
|
|
|
к |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
MVss |
|
|
|
|
|
|
|
|
|
б |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
e |
.М |
|
|
|
|
|
|
|
|
|
|
|
|
|
рис. 2.1. Зависимость выхода от входа идеального П-регулятораИ |
|
|
|
|
|
|
|
||||||||||||||
|
|
В реальном П-регуляторе выход регулятор ограничен ми имальным и максимальным |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
значением, |
как |
показано |
|
на |
рис. 2.2. Таким |
образом, для |
любого |
реального |
|
|
|
|||||||||||
|
|
|
|
регулятора |
есть |
рабочий |
диапазон изменения |
н |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
р гулируемого параметра, на |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
который он настраивается. В случае выхода регулируемого параметра за |
|
|
|
|||||||||||||||||||
|
|
|
|
допустимые диапазон регулирования, напр |
|
, по причине слишком большого |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мер |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
возмущающего воздействия, то говорят, что выход регулятора вышел в режим |
|
|
|
|||||||||||||||||||
|
|
|
|
насыщения. |
В этом случае |
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
предельное значение управляющего воздействия |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
регулятора не может вывести регулируемый параметр в рабочий диапазон. |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
MV |
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MVmax |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
tg(α) = Kc |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
з |
|
MVss |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
MVmin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
0 |
|
|
|
|
e |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рис. 2.2. Зависимость выхода от входа идеального П-регулятора |
|
|
|
|
|
|
|
||||||||||||||
|
|
П-р гулятор получил широкое распространение в промышленности благодаря своей |
|
|
|
|||||||||||||||||||||
|
|
|
ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
простоте настройки и скорости работы. Но у него есть существенный недостаток, |
|
|
|
||||||||||||||||||||
|
|
заключающийся в наличии статической ошибки. Если на объект управления, |
|
|
|
|||||||||||||||||||||
|
|
н |
|
|
|
|
||||||||||||||||||||
|
|
|
находящийся на номинальном режиме, подать возмущающее воздействие, то |
|
|
|
||||||||||||||||||||
|
У |
|
|
|
|
|||||||||||||||||||||
|
|
текущее значение регулируемого параметра никогда не придёт точно к заданному |
|
|
|
|||||||||||||||||||||
|
|
значению. Изменение коэффициента усиления так же не позволит добиться |
|
|
|
|||||||||||||||||||||
Г |
|
|
|
|
|
|||||||||||||||||||||
|
|
желаемого результата. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Р |
|
Для устранения статической ошибки используется интегральный регулятор. |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
2.2. |
Интегральный регулятор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Выход интегрального регулятора равен интегралу сигнала рассогласования:
3
2020 г., РГУ нефти и газа (НИУ) имени И.М. Губкина, каф. АТП, Барашкин Роман Леонардович
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∫ |
|
|
|
|
|
|
|
|
|
|
|
|
(3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
где |
|
– постоянная времени интегрирования, |
|
которая |
имеет |
размерность |
времени, |
|
|
а |
|||||||||||||||||||||||||||||||||||
|
|
|
|
обычно минуты. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
||||||||
|
|
Интегральный регулятор позволяет убрать статическую ошибку за счет того, что его |
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
и |
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
выход будет |
изменяться |
|
до |
|
тех пора, |
|
подбирая |
|
состояние |
исполнительного |
|
||||||||||||||||||||||||||||||||
|
|
|
|
устройства, пока сигнал рассогласования не станет равным нулю. |
|
|
к |
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
Интегральный регулятор будет приводить текущее значение к уставке кроме случая, когда |
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
выход регулятора уйдет в насыщение. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Г |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Интегральный |
|
|
регулятор |
является |
|
|
медленным |
|
|
регулятором. |
Он |
накапливаету |
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
существенное значение управляющего сигнала, |
когда сигнал рассогласования |
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
.М |
|
|
|
|
|
|||
|
|
|
|
удерживается в течение продолжительного времени. В отличие от |
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
пропорционального регулятора, у которого выход изменяется пропорционального |
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
||
|
|
|
|
изменению сигнала рассогласования. Поэтому интегральный регулятор редко |
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
используется отдельно, а на практике устанавливают пропорционально- |
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
интегральный регулятор (ПИ-регулятор): |
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
и) |
|
|
|
|
(4) |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
∫ |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
На рис. 2.3 приведена реакция ПИ-регулятора на единичный скачок. В нулевой момент |
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
времени |
выход |
|
регулятора |
|
изменяется |
|
на величину пропорциональной |
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
составляющей. С нулевого момента времени начинает изменяться интегральная |
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
составляющая. В момент времени равный постоянной времени интегрирования |
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
выход |
интегральной |
составляющей ( |
|
|
) |
|
становится равным |
значению |
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
входа умноженному на коэффициент усиления |
|
|
. Таким образом, |
определяет, |
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
сколько времени должно пройти, чтобы выход И-регулятора стал равным сигналу |
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
рассогласования. |
а |
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
e |
|
|
|
|
|
( |
|
|
|
|
|
|
MV |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MVi=Kc·1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tg(α)=MVi|Ti |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MVp=Kc·1 |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ф |
|
|
0 |
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
Ti |
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
||||
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
рис. 2.3. Реакция ПИ-регулятора на единичный скачок |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В случае, если входной сигнал отличен от единицы, то время интегрирования можно |
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
У |
|
определить: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Р |
|
где |
|
|
можно определить по табличным данным или графику, |
полученным при подаче |
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
воздействия на систему, |
|
– величина изменения сигнала рассогласования. |
|
|
|
|
|||||||||||||||||||||||||||||||||||||
4
2020 г., РГУ нефти и газа (НИУ) имени И.М. Губкина, каф. АТП, Барашкин Роман Леонардович
|
|
Насыщение интегрально регулятора |
|
|
|
|
|
|
|
|
|
|
|
|
а |
||||
|
|
Недостатком И-регулятора является насыщение его выхода, когда сигнал |
|
|
|||||||||||||||
|
|
|
|
рассогласования длительное |
время |
остаётся постоянным. В |
этом случае |
|
|
||||||||||
|
|
|
|
наблюдается |
неограниченный |
рост |
И-составляющей, |
который |
приводит к |
|
|
||||||||
|
|
|
|
|
н |
||||||||||||||
|
|
|
|
насыщению выхода регулятора. |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
||||
|
|
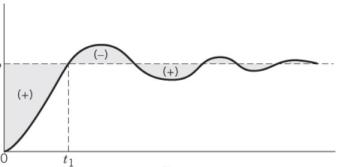
На рис. 2.4 приведена типичная реакция ПИ-регулятора на изменение уставки. На рисун е |
|
||||||||||||||||
|
|
|
|
знаками «+» |
и «-» отмечен вклад |
И-составляющей |
в |
|
к |
|
|
||||||||
|
|
|
|
суммарный выход ПИ- |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
регулятора. Первая максимальная амплитуда перерегулирования обусловлена |
|
|
|
||||||||||||
|
|
|
|
ростом И-составляющей до момента времени t1. К этому моменту времениу |
|
|
|
||||||||||||
|
|
|
|
суммарный выход ПИ-регулятора настолько большой, что регулируемыйГпараметр |
|
|
|
||||||||||||
|
|
|
|
продолжает расти до того момента, пока отрицательный вклад И-составляющей. |
|
|
|
||||||||||||
|
|
|
|
не компенсирует перерегулирования и не начнется возврат к заданному значению. |
|
|
|
||||||||||||
|
|
|
|
В зависимости от агрессивности настроек параметров регулятора колебательный |
|
|
|
||||||||||||
|
|
|
|
процесс может занимать достаточно длительное время. |
|
.М |
|
|
|
||||||||||
|
|
|
|
|
И |
|
|
|
|
||||||||||
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
||
|
|
|
|
xsp |
|
|
|
|
|
|
|
н |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
рис. 2.4. Реакция ПИИ-регулятора на изменение уставки |
|
|
|
|
|||||||||||
|
|
На |
|
практике насыщение ПИ-регулятораН |
может произойти в момент воздействия |
|
|
|
|||||||||||
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
существенного возмущения, которое выводит регулируемый параметр из рабочей |
|
|
|
||||||||||||
|
|
|
|
области. В ре ульт те физические |
ограничения исполнительного устройства, |
|
|
|
|||||||||||
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
например, полностью открытый или закрытый клапан, не позволяют вернуть |
|
|
|
||||||||||||
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
регулируемый п р метр в рабочую область. Фактически, обратная связь перестаёт |
|
|
|
||||||||||||
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
работать, т.к. управляющее воздействие не влияет на регулируемый параметр. |
|
|
|
||||||||||||
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Наиболее простой |
широко применяемый |
способ предотвращения насыщения И- |
|
|
|
||||||||||||
|
|
|
|
регулятораиявляется прекращение интегрирования в момент, когда выход И- |
|
|
|
||||||||||||
|
|
|
|
регулятора достиг границы начала насыщения. |
|
|
|
|
|
|
|
|
|
||||||
|
|
2.3. |
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дифференциальный регулятор |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Задача дифференциального регулятора заключается в предсказании управляющего |
|
|
|
||||||||||||||
|
|
|
фвоздействия на основании скорости изменения сигнала рассогласования. |
|
|
|
|||||||||||||
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Предположим, что температура верха колонны выросла на 5 градусов за 5 минут, что |
|
|
|
||||||||||||||
|
н |
|
является существенно быстрее, чем обычный рост на 5 градусов за 35 минут. Если |
|
|
|
|||||||||||||
|
У |
|
|
|
|
|
|||||||||||||
|
|
|
управление находится в ручном режиме, то опытный оператор по результатам |
|
|
|
|||||||||||||
|
|
|
анализа текущей ситуации поймет, |
что нужно |
|
принимать |
оперативные |
|
|
|
|||||||||
Г |
|
|
|
|
|
|
|||||||||||||
|
|
корректирующие меры. В случае автоматического регулирования с помощью ПИ- |
|
|
|
||||||||||||||
Р |
|
|
|
|
|
|
|||||||||||||
|
|
|
регулятора такой коррекции управляющего воздействия не произойдет. Так как П- |
|
|
|
|||||||||||||
|
|
|
регулятор реагирует только на отклонение температуры, не учитывая время |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
изменения сигнала рассогласования. |
А И-регулятор |
будет неэффективен при |
|
|
|
||||||||||
5
2020 г., РГУ нефти и газа (НИУ) имени И.М. Губкина, каф. АТП, Барашкин Роман Леонардович
Сигнал предваряющего регулирования, по примеру с опытным оператором, может быть |
|
|
|
|||||||||||
выработан с помощью дифференциального регулятора, выход которого |
|
|
а |
|||||||||||
пропорционален скорости изменения сигнала рассогласования: |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
(5) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где – время дифференцирования. |
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Выход Д-регулятора равен номинальному значению |
|
|
, |
если сигнал рассогласования |
|
|
|
|||||||
имеет постоянное значение. Обратите внимание, |
|
|
|
|
|
|
б |
|
|
|
||||
|
что даже если абсолютная |
|
|
|
||||||||||
величина рассогласования будет большой, |
но |
|
|
|
|
|
|
у |
|
|
|
|
||
при этом постоянной, то Д- |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
Г |
|
|
|
|
|
регулятор не будет вырабатывать управляющего воздействия для уменьшения |
|
|
|
|||||||||||
рассогласования. Поэтому Д-регулятор не используется отдельно. Обычно |
|
|
|
|||||||||||
используют ПДили ПИД-регуляторы. |
|
|
|
|
|
|
|
.М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д-регуляторы позволяют улучшить качество регулирования инерционных процессов, |
|
|
|
|||||||||||
снижать дестабилизирующее влияние И-составляющей |
|
быстрее выводить на |
|
|
|
|||||||||
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
заданное значение. Но если сигнал регулируемого параметра является шумным, |
|
|
|
|||||||||||
например, расход несжимаемой среды, то нефильтрова |
ый шумный сигнал будет |
|
|
|
||||||||||
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
усиливаться Д-составляющей и дестабилизировать процесс регулирования. |
|
|
|
|||||||||||
Поэтому Д-составляющая не используется |
н |
регулирования расхода |
|
|
|
|||||||||
для |
|
|
|
|||||||||||
|
|
е |
|
|
|
|
|
|
|
|
|
|||
м |
|
|
|
|
|
|
|
|
|
|
|
|
||
несжимаемых сред.
2.4.ПИД-регулятор
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
Опрос крупных непрерывных технологических производств с числом контуров обратной |
||||||||||||||||||||
|
|
|
|
|
связи от 500 до 5000 показал [1], что порядка 97% всех контуров с обратной |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
И |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
связью использовали одну из комбинаций ПИД-регулятора. |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Существуют |
|
различные |
|
промышленные |
реализации |
ПИД-регулятора. |
Одной из |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
распространённых является параллельная форма: |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
(6) |
|
|
|
|
|
|
|
|
|
з |
|
|
( |
|
|
|
∫ |
|
|
|
|
) |
|
||
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г |
|
|
|
|
|
реализации |
ПИД-регулятора: параллельная |
|||||||||
|
|
|
Помимо параллельной формы известны |
||||||||||||||||||||
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
форма с фильтром измерительных шумов, последовательная, последовательная |
||||||||||||||||||
|
|
|
|
|
форма с ф льтром измерительных шумов, |
усовершенствованная, параллельная с |
|||||||||||||||||
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
весовыми |
коэффициентами |
пропорциональной |
и |
дифференциальной |
||||||||||||||
|
|
|
|
|
сос авляющих. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
ф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
т |
|
|
|
|
|
|
Литература |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
н |
|
Desborough, L., and R. Miller, Increasing Customer Value of Industrial Control |
|||||||||||||||||||
|
|
|
1. |
|
|||||||||||||||||||
|
У |
|
|
Performance Monitoring—Honeywell, Experience, Proc. 6th Internat. Conf. on Chemical |
|||||||||||||||||||
|
|
|
Process Control (CPC VI), p. 169, AIChE, NY (2002). |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Г |
|
2. |
|
Mayr, O., The Origins of Feedback Control, MIT Press, Cambridge, MA, 1970. |
|
||||||||||||||||||
|
3. |
|
Ziegler, |
J. G., |
Those |
Magnificent |
Men and |
Their Controlling |
Machines, |
J. Dynamic |
|||||||||||||
Р |
|
|
|
||||||||||||||||||||
|
|
|
|
Systems, Measurement and Control, Trans. ASME, 97, 279 (1975) |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
4. |
|
Винер Н. Кибернетика, или управление и связь в животном и машине. — 2-е |
||||||||||||||||||
|
|
|
|
|
издание. — М.: Наука, 1983. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
6
2020 г., РГУ нефти и газа (НИУ) имени И.М. Губкина, каф. АТП, Барашкин Роман Леонардович