

литература / Функциональные схемы автоматизации / 2013 [Вильнина] Разработка системы управления технологическим процессом
.pdf2.6.2. Схемы контроля давления
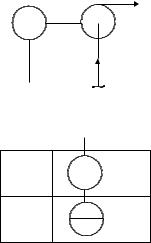
Индикация и регистрация давления газа в трубопроводе
(PIR) (рисунок 9).
5-1 Измерительный преобразователь избыточного давления пневматический, марка 13ДИ13, предназначен для преоб-
разования в унифицированный пневматический выходной сиг- |
5 |
|
нал давления жидких и газообразных сред, в том числе газооб- |
|
5 |
|||||||
разного кислорода. Класс точности 1, верхний предел измере- |
|
|
|||||||
ния 10 кгс/см2. |
|
|
|
|
|
по месту |
PT |
||
5-2 |
Вторичный |
прибор |
контроля |
давления |
5-1 |
||||
|
|||||||||
|
|
|
|
|
|
|
|
||
пневматический самопишущий, марка ПВ4.2П. |
|
|
на щите |
PIR |
|||||
Другой вариант: |
|
|
|
|
|
||||
|
|
|
|
|
5-2 |
||||
|
|
|
|
|
|
||||
5-1 |
Первичный |
передающий |
преобразователь |
|
|
||||
избыточного |
давления нейтральных и |
агрессивных |
сред со |
рисунок 9 |
|||||
стандартным токовым выходом 0…5 мА, марка Сапфир-22ДИ, |
|
|
|||||||
класс точности 0,5. |
|
|
|
|
|
|
|
||
5-2 Вторичный прибор контроля давления элктрический самопишущий, |
|||||||||
например электронный мост (КСП). |
|
|
|
|
|
|
|||
Индикация, регистрация и регулирование давления (PIRK, PC) (рисунок 10) |
|||||||||
6-1 Пневматический |
первичный |
преобразователь |
|
6 |
|
||||
давления, предел измерения 0… 1,6 МПа, выходной сиг- |
|
|
|||||||
|
|
|
|||||||
нал 0,02…0,1 МПа, марка МС-П-2 (манометр сильфон- |
|
|
|
||||||
ный с пневмовыходом). |
|
|
|
|
|
|
6-4 |
||
6-2 Вторичный прибор типа ПВ10.1Э. Предназна- |
|
|
|
||||||
чены для трехрежимного ведения процесса: ручного |
|
|
7 |
||||||
управления, автоматического регулирования, контроля и |
|
|
|
||||||
записи регулируемого параметра. Приборы применяется |
|
6 |
7 |
||||||
|
|
|
|||||||
в АСУТП в химической, нефтяной, нефтеперерабатыва- |
|
|
|
||||||
ющей и других отраслях промышленности. В приборах |
по месту |
PT |
|
||||||
6-1 |
|
||||||||
типов ПВ10.1Э, привод диаграммы осуществляется |
|
|
|||||||
|
|
|
|||||||
электрическим синхронным двигателем. Действие при- |
на щите |
PIRK |
PC |
||||||
бора основано на компенсационном принципе измере- |
|
6-2 |
6-3 |
||||||
|
|
|
|
|
|
|
|||
ния, при котором усилие на приемном элементе, возни- |
рисунок 10 |
|
|||||||
кающее от входного давления, уравновешивается усили- |
|
||||||||
|
|
|
|||||||
ем от натяжения пружины обратной связи. Приборы мо- |
|
|
|
||||||
гут быть использованы для работы с пневматическими датчиками или другими устройствами, выдающими унифицированные аналоговые сигналы 20...100 кПа.
6-3 Пневматическое устройстройство регулирующее пропорциональноинтегральное, марка ПР3.31.
6-4 Пневматическое исполнительное устройство
2.6.3. Схемы контроля уровня и расхода
Для измерения расхода жидкости первичные преобразователи устанавливаются в сечении трубопровода, поэтому на схеме, как правило, изображаются встроенными в трубопровод.
21

Индикация, регистрация и регулирование расхода (FIRK, FC) (рисунок 11).
7-1 Диафрагма марки ДК6-50 (сужающее устрой- |
|
FE |
|
ство). Условное давление 0,6МПа, условный проход 50 |
|
|
|
|
7-1 |
|
|
мм. |
|
|
7-5 |
7-2 Передающий преобразователь расхода с пнев- |
|
|
|
мовыходом, марка 13ДД11, (для пневматики) или Сап- |
|
7 |
8 |
фир-22ДД (для электрической схемы). |
|
||
|
|
|
|
Преобразователь измерительный разности давле- |
|
7 |
8 |
|
|
|
|
ния пневматический 13ДД11 предназначен для работы в |
по месту |
|
|
системах автоматического контроля и управления про- |
FT |
|
|
|
|
|
|
изводственными процессами с целью выдачи информа- |
|
7-2 |
|
|
|
|
|
ции в виде унифицированного пневматического сигнала |
на щите |
FIRK |
FC |
о перепаде давления, расходе жидкости и газа, а также |
|
7-3 |
7-4 |
|
|
||
уровне жидкости. Преобразователи эксплуатируются |
рисунок 11 |
|
|
совместно с вторичными регистраторами и регулятора- |
|
||
|
|
|
|
ми, работающими от стандартного сигнала 20-100 кПа. |
|
|
|
Преобразователи широко применяются в химической, нефтеперерабатывающей, нефтехимической промышленностях и ряде других областей.
Сапфир-22ДД предназначен для преобразования величины избыточного давления жидких и газовых сред в унифицированный токовый выходной сигнал дистанционной передачи, для работы в системах контроля, учета, регулирования технологическими процессами.
7-3 Вторичный прибор типа ПВ10.1Э (для пневматики) или электронный мост (для электрической схемы).
7-4 Пневматическое устройстройство регулирующее пропорциональноинтегральное, марка ПР3.31 (для пневматики) или электрическое регулирующее устройство (для электрической схемы).
7-5 Мембранное исполнительное устройство (клапан регулирующий двухседельный с мембранным исполнительным механизмом – для пневматики). Если используется с электронным мостом, то на входе необходимо использовать дополнительно электропневмопреобразователь. Для электрической схемы – клапан запорнорегулирующий односедельный фланцевый с электрическим исполнительным меха-
низмом. |
|
|
|
|
Индикация, регистрация и регулирование уровня (LIRK, LC) (рисунок 12). |
|
|||
8-1 Передающий преобразователь уровня изме- |
|
|
LT |
8 |
рительный буйковый, марка Сапифир – 22ДУ с уни- |
|
|
8-1 |
|
|
|
|
||
фицированным выходным сигналом, предел измере- |
8-4 |
|
|
|
ния 250 10000 мм. |
9 |
|
|
|
В зависимости от среды, которая может и до- |
|
|
|
|
|
|
|
|
|
вольно часто и бывает агрессивной и от того, какая |
|
8 |
9 |
|
необходима точность измерений, выбор уровнемера в |
|
|
|
|
основном производится из трёх типов. 1. Буйковые и |
по месту |
|
|
|
поплавковые уровнемеры применяются в стационар- |
|
|
|
|
ных резервуарах для измерения уровня неагрессивных |
|
8-2 |
8-3 |
|
|
на щите |
LIRK |
LC |
|
|
|
|
|
|
сред. 2. Ультразвуковые уровнемеры – для измерения |
|
|
|
|
|
рисунок 12 |
|
|
|
|
|
|
|
22 |
уровня в резервуарах при отсутствии излишней запылённости и при однородном характере среды, где применение поплавковых и буйковых уровнемеров не представляется возможным. 3. Радарные уровнемеры - во всех остальных случаях.
8-2 Вторичный прибор.
8-3 Регулирующее устройство.
8-4 Исполнительный устройство.
2.6.4. Схема управления электродвигателем
Управление электродвигателем, являющимся приводом центробежного насоса
(рисунок 13). |
|
|
10-1 |
Кнопочный выключатель |
|
10-2 |
Магнитный пускатель |
M |
10
|
10 |
|
по месту |
NS |
|
10-1 |
||
|
||
на щите |
H |
|
|
||
|
10-2 |
рисунок 13
23
3. Разработка структурной схемы системы автоматического регулирования
Вторая часть задания касается разработки структурной схемы системы автоматического регулирования (САР) технологического параметра, которая выполняется в виде блок-схемы. Средства автоматизации, выполняющие определенные функции в контуре разрабатываемой САР, на блок-схеме отображаются прямоугольниками произвольных размеров, внутри которых указывается наименование и тип прибора по номенклатуре завода изготовителя, а так же позиционное обозначение по функциональной схеме автоматизации.
Для структурной схемы САР предлагается взять одноконтурную схему с обратной связью, которая должна представлять собой набор взаимосвязанных и взаимодействующих между собой датчика, нормирующего преобразователя, автоматического регулятора, исполнительного механизма, регулирующего органа. Кроме того, необходимо выбрать исполнительный механизм по виду используемой энергии и выполнить синтез регулятора.
Пример выполнения структурной схемы приведен в Приложении 3.
3.1. Выбор законов регулирования
Для стабилизации давления, уровня, температуры, расхода и других технологических переменных в системах управления используются различные законы регулирования. Выбор закона регулирования определяется следующими основными факторами: типом объекта управления, типом и конструкцией регулирующего органа и технологического объекта управления, требованиями к точности регулирования, требованиями к непрерывности, из технологических соображений, управляющего воздействия. Использование регуляторов прямого действия не рекомендуется, т.к. в настоящее время в АСУ ТП они применяются редко.
Для регулирования температуры тепловых объектов с использованием электрических нагревателей широко используются релейные двухпозиционные регуляторы. Такие объекты обладают самовыравниванием, малым запаздыванием, большой емкостью и, соответственно, инерционностью и, как правило, допускают импульсный характер управляющего воздействия. Поэтому применение релейных регуляторов позволяет достичь приемлемого качества регулирования при использовании сравнительно простых и дешевых технических средств автоматизации.
Стандартные аналоговые законы регулирования (П-, ПИ- ПИД-, ПД-законы) и регуляторы, их реализующие, позволяют достичь более высокого качества регулирования при непрерывном управляющем воздействии, хотя они более дороги и сложны в настройке. При этом для объектов с самовыравниванием (статических) рекомендуется применение законов регулирования с интегральной составляющей, а если ТОУ не имеет самовыравнивания (интегрирующий объект), использование астатических (с интегральной составляющей) законов регулирования нецелесообразно. В любом случае для устранения статической ошибки необходимо, чтобы в контуре регулирования была хотя бы одна интегральная составляющая, не важно, в объекте или в регуляторе.
24
Наилучшие показатели качества регулирования, в общем случае, дает применение ПИД-регуляторов, однако они наиболее сложны в настройке. Введение Д- составляющей целесообразно при наличии запаздывания, сравнимого с постоянной времени ТОУ. Если же запаздывание невелико (менее 15% от постоянной времени ТОУ), то Д-составляющая может даже ухудшить качество управления из-за неизбежной зашумленности сигнала регулируемой величины (например, при регулировании расхода). По этой причине, поскольку доля объектов управления с большим запаздыванием сравнительно невелика, чаще всего в промышленности применяются ПИрегуляторы.
Заданием не оговаривается вид энергии питания (электрическое или сжатый воздух) выбираемых средств автоматизации, поэтому на основании анализа объекта автоматизации и свойств электрических и пневматических приборов производится обоснованный выбор вида энергии. Желательно использование одного вида энергии. В настоящее время полностью пневматические системы управления используются только в особо пожаровзрывоопасных объектах, например, в газовой промышленности. В большинстве же случаев проектируются электропневматические системы с использованием лишь пневматических мембранных исполнительных механизмов, а для обеспечения пожаро- и взрывобезопасности используют электрические средства автоматизации в искро- и взрывобезопасном исполнении. Поэтому использование пневматических устройств, кроме МИМ и электропневматических преобразователей, в данном проекте не рекомендуется.
В данном курсовом проекте предлагается использовать программу САР-синтез (L:\Study\СУХТП\Курсовой проект\САР-синтез\sar_sintez_w.exe) для расчета параметров ПИ- и ПИДрегуляторов и построения их переходных процессов с последующим выбором регулятора с лучшим качеством регулирования. Заданием оговариваются все параметры объекта регулирования необходимые для выбора закона регулирования и определения параметров настройки регулятора. В качестве исходных данных, для расчета параметров регулятора, рекомендуется использовать следующее: 1) передаточные функции объекта по каналам управления и возмущения совпадают; 2) объект первого порядка; 3)параметры объекта выдаются преподавателем; 4) метод расчета параметров регулятора - оптимального модуля; 5) закон регулирования ПИ- и ПИД-; 6) вид регулятор – аналоговый. Результаты расчета необходимо записать и продолжить работу в программе САР-синтез. Далее необходимо вывести графики переходных процессов, для которых величина подаваемого возмущения составляет 20%, «ворота» для определения окончания переходного процесса – 5%. Полученные графики необходимо приложить в пояснительную записку (копирование производится клавишами Ctrl+Print). Завершающим этапом является обработка полученных графиков переходных процессов, для определения прямых показателей качества регулирования (время регулирование, колебательность, перерегулирование, статическая ошибка).
3.2. Выбор исполнительного механизма по виду используемой энергии
После выбора закона регулирования устанавливается вид энергии питания регуляторов. Для особо пожаровзрывоопасных производств использование пневматической системы приборов является наиболее приемлемым. Поэтому выбор вида энергии
25
питания приборов и средств автоматизации в этом случае необходимо начинать с оценки возможности применения пневматической системы приборов.
Измерительная система – одно из наиболее инерционных звеньев САР (кроме ТОУ), поэтому при выборе датчика в первую очередь необходимо учитывать его динамические характеристики. Запаздывание и постоянная времени датчика должны составлять менее 5% постоянной времени ТОУ. Нелинейностью статических характеристик измерительных устройств обычно пренебрегают, т.к. в системах стабилизации измеряемая и регулируемая величины изменяются в достаточно узких пределах.
Вследствие простоты устройства, изготовления и эксплуатации наиболее часто в качестве исполнительных механизмов используют мембранные исполнительные механизмы (МИМ). Промышленностью серийно выпускаются МИМы совместно с клапанами [7,8]. Такие комплекты называются исполнительными устройствами. Для повышения быстродействия пневматических исполнительных механизмов и улучшения их статической характеристики (линейности, устранения гистерезиса) они дополняются позиционерами [9,10].
Большинство электродвигательных электрических исполнительных механизмов постоянной скорости допускают как релейно-контактное, так и бесконтактное управление. Основными элементами силовой цепи релейно-контактной схемы управления являются магнитные пускатели и контакторы, а основными элементами силовой цепи бесконтактного управления – тиристорные пускатели и бесконтактные тиристорные преобразователи с широтно-импульсным или фазоимпульсным выходом [11].
Регулирующее воздействие может представлять собой изменение материального или энергетического потока на входе в объект управления. Управление материальными потоками осуществляется клапанами, задвижками заслонками, дозаторами и т.д. Регулирование расхода пульп, кристаллизующихся растворов, суспензий, растворов с абразивными частицами, химически агрессивных сред, вязких жидкостей рекомендуется осуществлять шланговыми или диафрагмовыми клапанами [8, с.122].
Детальный выбор и расчет регулирующего органа заданием на проект не предусматривается.
Для управления потоком энергии, поступающим с каким-либо теплоносителем или хладоагентом, используются различные клапаны. Для пара, сжатого воздуха, горячей воды, рассола применяются вентили, шиберы, задвижки, заслонки, заслонки для нагретых газов под небольшим давлением. Если энергия выделяется электрическим нагревателем, то для управления используют реостаты, автотрансформаторы, реле, магнитные пускатели, тиристорные усилители и т.д.
4. Использование ЭВМ в управлении технологическими процессами
Автоматизированная система управления технологическими процессами (АСУ ТП) – это человеко-машинная система, обеспечивающая сбор, обработку и отображение информации, а также выработку и передачу на регулирующие органы управляющих воздействий, обеспечивающих заданный режим функционирования объекта управления. При этом возможно ведение технологического процесса в режиме, оптимальном с точки зрения какого-либо технико-экономического показателя, характеризующего качество управления.
26

Целями создания АСУ ТП являются:
экономия топлива, сырья, материалов и других ресурсов;
обеспечение безопасности функционирования технологических аппаратов;
повышение качества выходного продукта;
снижение затрат живого труда;
достижение оптимальной загрузки оборудования;
оптимизация режимов работы аппаратов.
Совокупность действий системы управления, направленной на достижение поставленной цели управления, реализуются информационной и управляющей функциями АСУ ТП.
Информационные функции: централизованный контроль и измерение технологических переменных, косвенное измерение (вычисление) значений технологических переменных и технико-экономических показателей (ТЭП) производства, оценка и прогноз состояния оборудования.
Управляющие функции: стабилизация технологических переменных, оптимальное управление технологическими режимами, адаптивное управление объектом, логическое управление аппаратами, оборудованием. Информационные, вычислительные, а частично и управляющие функции реализуются средствами вычислительной техники в рамках информационной и управляющей подсистем. В зависимости от степени участия человека в реализации функций АСУ ТП различают автоматизированный и автоматический режимы работы. В первом случае оперативный персонал принимает активное участие в управлении. Здесь реализуются: ручное дистанционное управление в период пуска, возникновения аварийных ситуаций или изменения режима работ технологического процесса.
В автоматическом режиме АСУ ТП вырабатывает и реализует управляющее воздействия без участия оператора. При этом реализуется централизованная или распределенная структура управляющей системы. В системах с централизованной структурой, реализация всех процессов управления объектами, осуществляется в едином органе управления (ЭВМ), который реализует сбор и обработку информации об управляемых объектах и на основе их анализа, в соответствии с критериями системы, вырабатывает управляющие сигналы (рисунок 14). ЭВМ выполняет функцию центрального управляющего устройства в супервизорном режиме управления, изменяя уставки локальных САР, а также в режиме прямого цифрового управления (ПЦУ), когда ЭВМ непосредственно передает управляющие сигналы на исполнительные устройства.
ЭВМ
Установка 1 |
Установка 2 |
Установка 3 |
|
технологический объект управления |
|
Рисунок 14. Централизованная система управления |
|
|
27

АСУ, функционирующая в режиме супервизорного управления (супервизор — управляющая программа или комплекс программ), предназначена для организации многопрограммного режима работы ЭВМ и представляет собой двухуровневую иерархическую систему, обладающую широкими возможностями и повышенной надежностью [12]. Нижний уровень, непосредственно связанный с процессом, образуют локальные регуляторы отдельных технологических параметров. На верхнем уровне управления установлена ЭВМ, основной функцией которой является определение оптимального технологического режима и вычисление на его основе значений уставок локальных регуляторов.
Супервизорный режим позволяет не только автоматически контролировать процесс, но и автоматически управлять им вблизи оптимальной рабочей точки. Функции оператора сводятся к наблюдению за технологическим процессом и в случае необходимости к корректировке цели управления и ограничений на переменные.
Режим ПЦУ резко повышает эффективность АСУ ТП, исключает из комплекса технических средств регистрирующие, показывающие приборы и локальные автоматические регуляторы (следовательно, громоздкие щиты технологического контроля (ЩТК)), позволяет реализовать оптимизационные алгоритмы и создавать адаптивные системы управления. Но его реализация требует высокой надежности вычислительной системы, наличия математических моделей для различных режимов работы технологического оборудования.
Для повышения надежности управления и живучести управляющих систем в настоящее время широко применяются распределенные вычислительные комплексы, состоящие из нескольких связанных между собой ЭВМ и (или) микропроцессорных контроллеров с распределением между ними выполняемых системой функций АСУ ТП (рисунок 15) [13]. Меньшие требования по надежности управляющих вычислительных комплексов (УВК) предъявляются при реализации режима супервизорного управления, т.к. в этом случае выход из строя вычислительного устройства не приводит к прекращению выработки управляющих воздействий.
|
|
|
|
|
ЭВМ |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
микроЭВМ 1 |
|
|
|
|
микроЭВМ 2 |
|
|
|
|
микроЭВМ 3 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Установка 1 |
Установка 2 |
Установка 3 |
|
технологический объект управления |
|
Рисунок 15. Децентрализованная система управления с функциональным распределением |
||
При реализации режима ПЦУ на ЭВМ обычно организуют автоматизированные рабочие места операторов, обеспечивающие отображение и регистрацию технологиче-
28
ской информации и прием команд оператора (т.е. человеко-машинный интерфейс). Функции программно-логического управления, технологических и противоаварийных блокировок, а также аналогового локального регулирования выполняют микропроцессорные контроллеры.
Автоматизированные рабочие места операторов содержат специальные средства отображения информации: мониторы ЭВМ, плазменные и жидкокристаллические экраны большой площади для отображения мнемосхем и цифробуквенной информации, печатающие устройства, а также клавиатур и специальных манипуляторов для ввода команд оператора и управления устройствами отображения.
Функции и режимы работы АСУ ТП реализуются техническим, программным и другими видами обеспечений. Техническое обеспечение образовано чувствительными элементами, преобразователями, вычислительной техникой, вторичными КИП и автоматическими регуляторами, исполнительными механизмами и т.д.
Программное обеспечение состоит из специальных программ, обеспечивающих сбор, обработку, отображение, регистрацию технологической информации, а также выработку управляющих воздействий. В настоящее время для этой цели разработаны специальные пакеты программ, называемые SCADA-системами.
При разработке АСУ ТП должны соблюдаться общие принципы: формулирование новых задач, системного подхода, единой информационной базы, непрерывного развития системы, разумной типизации.
В проекте АСУТП необходимо указать цели ее создания и выполняемые функции. Важным моментом в реализации АСУТП является обеспечение ее необходимой информацией.
29
Литература
1.Горячев В.П. Основы автоматизации производства в нефтеперерабатывающей промышленности. – М.: Химия, 1987, 126 с.
2.Клюев А.С. и др. Проектирование систем автоматизации технологических процессов: Справочное пособие. – М.: Энергоатомиздат, 1990, 464с.
3.Обозначения условные графические ГОСТ 2.784-96. – М.: ИПК Издательство стандартов, 2002
4.Голубятников В.А., Шувалов В.В. Автоматизация производственных процессов в химической промышленности.– М.: Химия, 1985, 352 с.
5.Обозначения условные приборов и средств автоматизации в схемах. ГОСТ 21.404-85. – М.: Издательство стандартов, 1987
6.www.metran.ru
7.Полоцкий Л.М., Лапшенков Т.И. Автоматизация химических производств. Теория, расчет и проектирование систем автоматизации.– М.: Химия, 1982, 296с.
8.Гинзбург И.В. Автоматическое регулирование и регуляторы в промышленности строительных материалов.– Л.: Стройиздат, Ленинград. отд., 1985, 256с.
9.Трубопроводная арматура с автоматическим управлением: Справочник/ Гуревич Д.Ф. и др. – Л.: Машиностроение, Ленинград. отд., 1982, 320 с.
10.Слободкин М.С. и др. Исполнительные устройства регуляторов: Справочное руководство – М.: Недра, 1972, 304с.
11.Шарков А.А. и др. Автоматическое регулирование и регуляторы химической промышленности. – М.: Химия, 1990; 288с.
12.Соломенцев Ю.М. Теория автоматического управления. – М.: Высшая школа, 2000, 256с.
13.Шкатов Е.Ф. Основы автоматизации технологических процессов химических производств. – М.: Химия, 1988; 303с.
30