

литература / Функциональные схемы автоматизации / ANSI_ISA 5.1 2009 - Instrumentation Symbols and Identification
.pdf- 51 - |
ANSI/ISA-5.1-2009 |
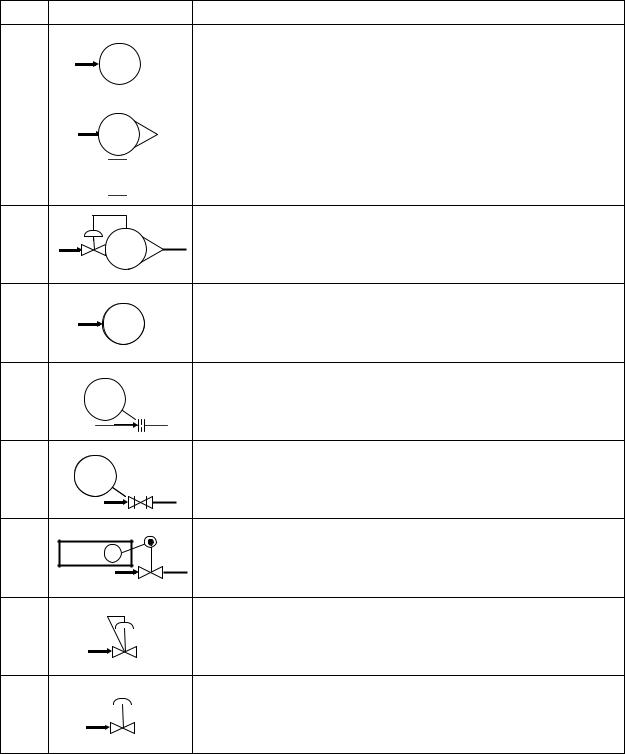
Table 5.4.2 — Final control element actuator symbols
Note: Numbers in parentheses refer to explanatory notes in Clause 5.3.4
No |
Symbol |
Description |
(7)• Actuator with top-mounted handwheel.
12
(7)• Manual actuator.
13 |
|
|
• |
Hand actuator. |
|
|
|||
|
|
|
|
|
(7)• Electrohydraulic linear or rotary actuator.
14 |
E H |
(7)• Actuator with manual actuated partial stroke test device.
15
(7)• Actuator with remote actuated partial stroke test device.
16 |
S |
(8)• Automatic reset on-off solenoid actuator.
17 |
|
• |
Non-latching on-off solenoid actuator. |
S |
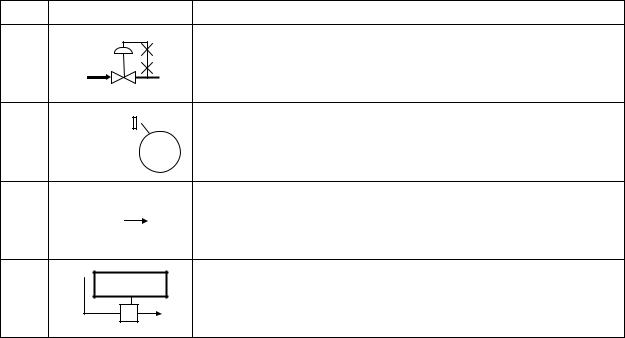
(8)• Manual or remote reset on-off solenoid actuator.
18 |
|
|
|
• |
Latching on-off solenoid actuator. |
S |
|||||
|
|
|
|
R |
|
|
|
|
|
|
|
(8)• Manual and remote reset on-off solenoid actuator.
19 |
R |
S |
• |
Latching on-off solenoid actuator. |
|
|
|
|
R |
|
|
|
|
|
|
||
(9)• Spring or weight actuated relief or safety valve actuator.
20 |
|
|
|
|
|
|
|
|
|
(9) |
|
|
• |
Pilot actuated relief or safety valve actuator. |
|
P |
|||
21 |
|
• |
Pilot pressure sensing line deleted if sensing is internal. |
|
|
|
|||
|
|
|
|
|
//^:^^#^~^^"#@::"~^$:~@""#:$@^"*^~@~$"~~""^^:@^^:#^~~\\
--`,,```,,,,````-`-`,,`,,`,`,,`---
Copyright International Society of Automation |
|
Provided by IHS under license with ISA |
|
No reproduction or networking permitted without license from IHS |
Not for Resale |
//^:^^#^~^^"#@::"~^$:~@""#:$@^"*^~@~$"~~""^^:@^^:#^~~\\
ANSI/ISA-5.1-2009 |
- 52 - |
Table 5.4.3 — Self-actuated final control element symbol
Note: Numbers in parentheses refer to explanatory notes in Clause 5.3.4.
No |
Symbol |
Description |
•Automatic flow regulator.
1 |
|
XXX |
|
|
|
• |
XXX = FCV without indicator. |
|
|
|
|
|
|
• |
XXX = FICV with integral indicator. |
|
|
|
|
|
|
|
|
|
(1) (2) |
FICV |
|
|
|
• |
Variable area flowmeter with integral manual adjusting valve. |
2 |
(a) |
|
|
|
• |
Instrument tag bubble required with (b). |
|
|
|
|
|
|
|
(b) 

•Constant flow regulator.
3
FICV
•Flow sight glass.
4 |
FG |
|
• |
Type shall be noted if more than one type used. |
|
|
|
|
|
|
|
|
|
|
•Generic flow restriction.
5 |
FO |
• |
Single stage orifice plate as shown. |
|
|
• |
Note required for multi-stage or capillary tube types. |
|
|
• |
Restriction orifice hole drilled in valve plug. |
6 |
FO |
• |
Tag number shall be omitted if valve is otherwise identified. |
•Level regulator.
7 |
• |
Ball float and mechanical linkage. |
|
TANK |
|
•Backpressure regulator.
8 |
|
|
|
• |
Internal pressure tap. |
|
|
|
|
|
|
•Backpressure regulator.
9 |
|
|
|
|
|
• |
External pressure tap. |
|
|
|
|
|
|||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
--`,,```,,,,````-`-`,,`,,`,`,,`---
Copyright International Society of Automation |
|
Provided by IHS under license with ISA |
|
No reproduction or networking permitted without license from IHS |
Not for Resale |

- 53 - |
ANSI/ISA-5.1-2009 |
Table 5.4.3 — Self-actuated final control element symbol
Note: Numbers in parentheses refer to explanatory notes in Clause 5.3.4.
---`,,`,,`,`,,`-`-`,,```,,,,````--
No |
Symbol |
Description |
•Pressure-reducing regulator.
10 |
|
|
|
|
|
• |
Internal pressure tap. |
|
|
|
|
||||
|
|
|
|
|
|
|
|
•Pressure-reducing regulator.
11 |
|
|
|
|
|
• |
External pressure tap. |
|
|
|
|
||||
|
|
|
|
|
|
|
|
•Differential pressure regulator.
12 |
• |
External pressure taps. |
•Differential pressure regulator.
13 |
• |
Internal pressure taps. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Pressure-reducing regulator w/ integral outlet pressure relief and pressure gauge. |
14 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PG |
Generic pressure safety valve. |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Pressure relief valve. |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Generic vacuum safety valve. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Vacuum relief valve. |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Generic pressure - vacuum relief valve. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
17 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Tank pressure - vacuum relief valve. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Pressure safety element. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
18 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Pressure rupture disk. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Pressure relief. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Pressure safety element. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
19 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Vacuum rupture disk. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Vacuum relief. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Copyright International Society of Automation |
|
Provided by IHS under license with ISA |
|
No reproduction or networking permitted without license from IHS |
Not for Resale |
//^:^^#^~^^"#@::"~^$:~@""#:$@^"*^~@~$"~~""^^:@^^:#^~~\\
ANSI/ISA-5.1-2009 |
- 54 - |
---`,,`,,`,`,,`-`-`,,```,,,,````--
Table 5.4.3 — Self-actuated final control element symbol
Note: Numbers in parentheses refer to explanatory notes in Clause 5.3.4.
No |
Symbol |
Description |
•Temperature regulator.
20 |
• |
Filled thermal system. |
|
|
|
• |
Thermal safety element. |
21 |
TANK |
|
• |
Fusible plug or disk. |
|
||||
|
|
|
TSE |
|
|
|
|
|
|
•Generic moisture trap.
22 |
|
|
|
|
• |
Steam trap. |
|
|
|
|
|
• |
Note required for other trap types. |
|
|
T |
|
|||
|
|
|
|
|
||
•Moisture trap with equalizing line.
23 |
|
TANK |
T
//^:^^#^~^^"#@::"~^$:~@""#:$@^"*^~@~$"~~""^^:@^^:#^~~\\
Copyright International Society of Automation |
|
Provided by IHS under license with ISA |
|
No reproduction or networking permitted without license from IHS |
Not for Resale |
- 55 - |
ANSI/ISA-5.1-2009 |
//^:^^#^~^^"#@::"~^$:~@""#:$@^"*^~@~$"~~""^^:@^^:#^~~\\ |
---`,,`,,`,`,,`-`-`,,```,,,,````-- |
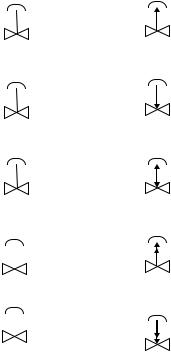
Table 5.4.4 — Control valve failure and de-energized position indications
Note: Numbers in parentheses refer to explanatory notes in Clause 5.3.4.
No |
Method A (1) (10) |
Method B (1) (10) |
|
Definition |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Fail to open position. |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FO |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Fail to closed position. |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FC |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Fail locked in last position. |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
FL |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Fail at last position. |
4 |
|
|
|
|
|
|
|
|
|
• |
Drift open. |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
FL/DO |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Fail at last position. |
5 |
|
|
|
|
|
|
|
|
|
• |
Drift closed. |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||
|
FL/DC |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Copyright International Society of Automation |
|
Provided by IHS under license with ISA |
|
No reproduction or networking permitted without license from IHS |
Not for Resale |
ANSI/ISA-5.1-2009 |
- 56 - |
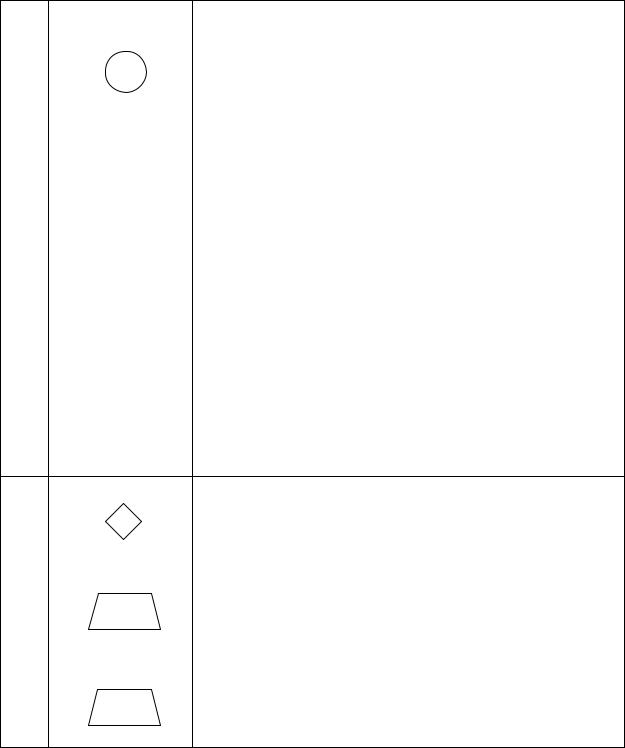
Table 5.5 — Functional diagramming symbols
Note: Numbers in parentheses refer to explanatory notes in Clause 5.3.5.
No |
Symbol (1) (2) |
Description |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Measuring, input, or readout device. |
1 |
|
|
|
[*] |
|
• |
[*] = Instrument tag number. |
|
|
|
|
|
|
• |
Symbols from Table 5.2.1 may be used. |
||
|
|
|
|
|
|
|
|
|
|
(3) (4) |
|
|
|
|
|
• |
Automatic single-mode controller. |
2 |
|
|
|
|
|
|
|
|
|
|
|
(*) |
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
(*) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3) (4) |
|
|
|
|
|
• |
Automatic two-mode controller. |
3 |
|
|
|
|
|
|
|
|
|
|
|
(*) |
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
(*) |
|
(*) |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3) (4) |
|
|
|
|
|
• |
Automatic three-mode controller. |
4 |
|
|
|
|
|
|
|
|
|
|
|
(*) |
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
(*) |
|
(*) |
(*) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3) (4) |
|
|
|
|
|
• |
Automatic signal processor. |
5 |
|
|
|
|
|
|
|
|
|
|
|
(*) |
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
(4)• Manual signal processor.
6 |
|
|
|
|
(*) |
|
|
|
|
|
|
(3) (4) |
|
• |
Final control element. |
7 |
|
• |
Control valve. |
|
(*) |
|
|
|
|
|
|
(3) (4) |
|
• |
Final control element with positioner. |
8 |
|
• |
Control valve with positioner. |
|
|||
|
(*) |
|
|
--`,,```,,,,````-`-`,,`,,`,`,,`---
//^:^^#^~^^"#@::"~^$:~@""#:$@^"*^~@~$"~~""^^:@^^:#^~~\\
Copyright International Society of Automation |
|
Provided by IHS under license with ISA |
|
No reproduction or networking permitted without license from IHS |
Not for Resale |
- 57 - |
ANSI/ISA-5.1-2009 |
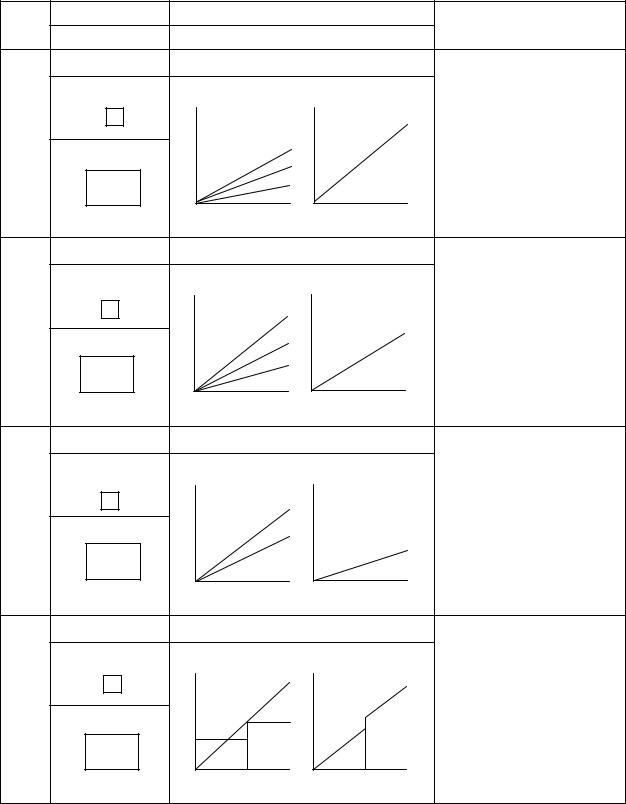
Table 5.6 — Signal processing function block symbols
Note: Numbers in parentheses refer to explanatory notes in Clause 5.3.6.
|
Function |
|
|
Equation |
|
|
Definition |
|
|
|
||
|
No |
|
|
|
|
|
|
|
|
|
||
|
Symbol (1) (2) |
|
|
Graph |
|
|
|
|
|
|
|
|
|
Summation |
|
|
M = X1 + X2 …+ Xn |
• |
Output |
equals |
algebraic |
sum |
of |
||
|
1 |
|
|
|
|
inputs. |
|
|
|
|
|
|
|
Σ |
X |
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
Xn |
|
|
|
|
|
|
|
|
|
|
|
|
X2 |
|
|
|
|
|
|
|
|
|
Σ |
|
|
X1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
t |
|
|
|
|
|
|
|
Average |
|
|
M = X1 + X2 …+ Xn /n |
• |
Output |
equals |
algebraic |
sum |
of |
||
|
2 |
|
|
|
|
inputs divided by number of inputs. |
|
|
||||
|
Σ/n |
X |
|
Xn |
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
X2 |
|
|
|
|
|
|
|
|
|
Σ/n |
|
|
X1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
t |
|
|
|
|
|
|
|
Difference |
|
|
M = X1 − X2 |
• |
Output |
equals |
algebraic |
differ- |
|||
|
3 |
|
|
|
|
ence of two inputs. |
|
|
|
|
||
|
∆ |
X |
|
X1 |
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X2 |
|
|
|
|
|
|
|
|
|
∆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
t |
|
|
|
|
|
|
|
Multiplication |
|
|
M = X1 x X2 |
• |
Output |
equals |
product |
of |
two |
||
|
4 |
|
|
|
|
inputs. |
|
|
|
|
|
|
|
X |
X |
|
X1 |
M |
|
|
|
|
|
|
|
-- |
|
|
|
|
|
|
|
|
|
|
|
|
-`-`,,```,,,,```` |
|
|
|
X2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
---`,,`,,`,`,,` |
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
t1 |
t |
t1 |
t |
|
|
|
|
|
|
|
Copyright International Society of Automation |
|
Provided by IHS under license with ISA |
|
No reproduction or networking permitted without license from IHS |
Not for Resale |
//^:^^#^~^^"#@::"~^$:~@""#:$@^"*^~@~$"~~""^^:@^^:#^~~\\
ANSI/ISA-5.1-2009 |
- 58 - |
---`,,`,,`,`,,`-`-`,,```,,,,````--
|
|
Table 5.6 — Signal processing function block symbols |
|
|
|||||
Note: Numbers in parentheses refer to explanatory notes in Clause 5.3.6. |
|
|
|
|
|||||
No |
Function |
Equation |
|
Definition |
|
|
|||
|
|
|
|
|
|
|
|
||
Symbol (1) (2) |
|
Graph |
|
|
|
|
|||
|
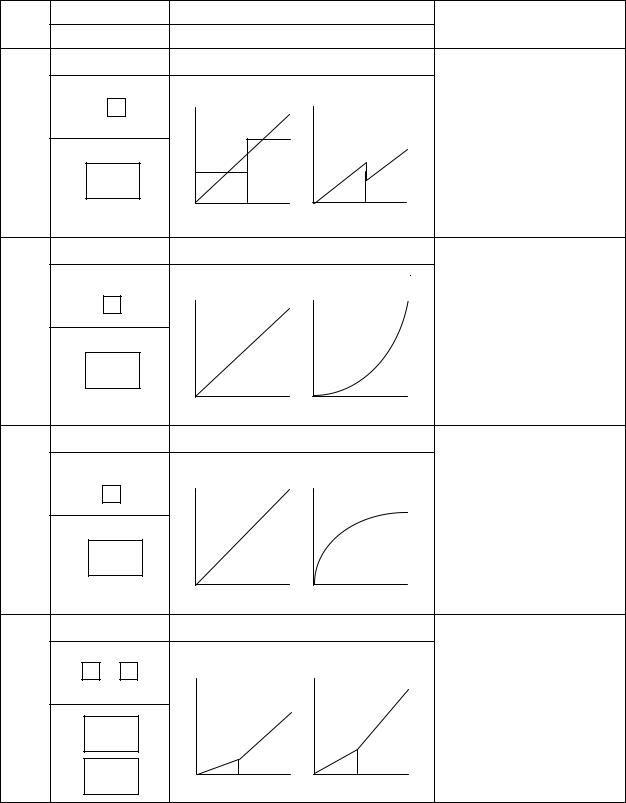
Division |
M = X1 ÷ X2 |
• |
Output equals quotient |
of |
two |
|||
5 |
|
|
|
|
|
|
inputs. |
|
|
|
|
÷ |
X |
X1 |
M |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
X2 |
|
|
|
|
|
|
|
÷ |
|
|
|
|
|
|
|
|
|
|
t1 |
t |
t1 |
t |
|
|
|
6 |
Exponential |
M = Xn |
• Output equals nth power of input. |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
Xn |
X |
|
M |
|
|
|
|
|
|
Xn |
|
|
|
|
|
|
|
|
|
|
|
t |
|
t |
|
|
|
Root extraction |
M =n√X |
• Output equals nth root of input. |
|||||||
7 |
|
|
|
|
|
• |
If ‘n’ omitted, square |
root |
is |
|
|
|
|
|
|
|
assumed. |
|
|
|
|
n√ |
X |
|
M |
|
|
|
|
|
|
n√ |
|
|
|
|
|
|
|
|
|
|
|
t |
|
t |
|
|
|
|
Proportion |
M = KX or M = PX |
• Output proportional to input. |
|
|||||
8 |
|
|
|
|
|
• Replace ‘K’ or ‘P’ with ‘1:1’ for |
|||
(3) |
|
|
|
|
|
|
volume boosters. |
|
|
a) |
K |
b) |
P |
|
|
• Replace ‘K’ or ‘P’ with ‘2:1’, ‘3:1’, |
|||
|
M |
|
etc., for integer gains. |
|
|
||||
|
|
|
X |
|
|
|
|
|
|
(3) |
|
|
|
|
|
|
|
|
|
a) |
|
K |
|
|
|
|
|
|
|
b) |
|
P |
t1 |
t |
t1 |
t |
|
|
|
|
|
|
|
|
|
||||
Copyright International Society of Automation |
|
Provided by IHS under license with ISA |
|
No reproduction or networking permitted without license from IHS |
Not for Resale |
//^:^^#^~^^"#@::"~^$:~@""#:$@^"*^~@~$"~~""^^:@^^:#^~~\\
- 59 - |
ANSI/ISA-5.1-2009 |
Table 5.6 — Signal processing function block symbols
Note: Numbers in parentheses refer to explanatory notes in Clause 5.3.6.
|
No |
|
|
Function |
|
|
|
|
|
|
|
Equation |
|
|
|
|
|
|
|
|
|
|
Definition |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Symbol (1) (2) |
|
|
|
|
|
|
|
Graph |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
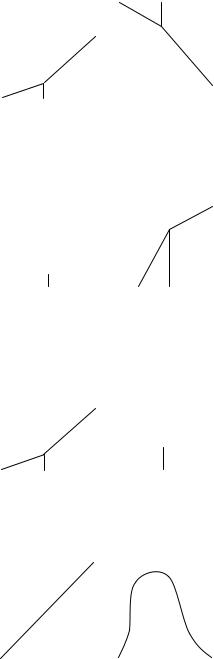
Reverse proportion |
|
|
|
|
|
|
|
M = -KX or M = -PX |
|
|
|
|
|
|
|
• |
Output |
inversely proportional to |
||||||||||||||||||||||
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
input. |
|
|
|
|
|
(3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Replace ‘-K’ or ‘-P’ with ‘-1:1’ for |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t1 |
t |
|
volume boosters. |
|
|
||||||
|
|
|
a) |
-K |
|
b) |
-P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Replace |
‘-K’ or ‘-P’ |
with |
‘-2:1’, |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
‘-3:1’, etc., for integer gains. |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
a) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
b) |
|
|
|
-P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t1 |
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Integral |
|
|
|
|
|
|
|
|
|
|
|
M = (1/TI)ΙXdt |
|
|
|
|
|
|
|
• |
Output varies with magnitude and |
||||||||||||||||
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
time duration of input. |
|
|
|
|
|
(3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Output |
proportional |
to |
time |
|
|
a) |
|
|
|
b) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
integral of input. |
|
|
||||
|
|
|
∫ |
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
TI = Integral time constant. |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a) |
|
|
|
∫ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b) |
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
t1 |
t2 |
t |
|
|
|
|
|
t1 |
|
t2 |
t |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Derivative |
|
|
|
|
|
|
|
M = TD (dx/dt) |
|
|
|
|
|
|
|
• |
Output proportional to time rate of |
|||||||||||||||||||||
|
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
change of input. |
|
|
|
|
|
(3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
TD = derivative time constant. |
|||
|
|
a) |
|
|
|
|
b) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
d/dt |
|
D |
|
|
X |
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a) |
|
|
d/dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∫ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
b) |
|
|
|
D |
|
|
|
|
|
|
t1 |
t |
|
|
|
|
|
t1 |
t |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Unspecified function |
|
|
|
|
|
|
|
M = ƒ(x) |
|
|
|
|
|
|
|
|
• |
Output is a nonlinear or |
||||||||||||||||||||||
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
unspecified function of the input. |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
• |
Function defined in note or other |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
text. |
|
|
|
|
|
|
|
|
|
|
ƒ(x) |
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
ƒ(x) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
t |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
--`,,```,,,,````-`-`,,`,,`,`,,`--- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Copyright International Society of Automation |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Provided by IHS under license with ISA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
No reproduction or networking permitted without license from IHS |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Not for Resale |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
//^:^^#^~^^"#@::"~^$:~@""#:$@^"*^~@~$"~~""^^:@^^:#^~~\\
ANSI/ISA-5.1-2009 |
- 60 - |
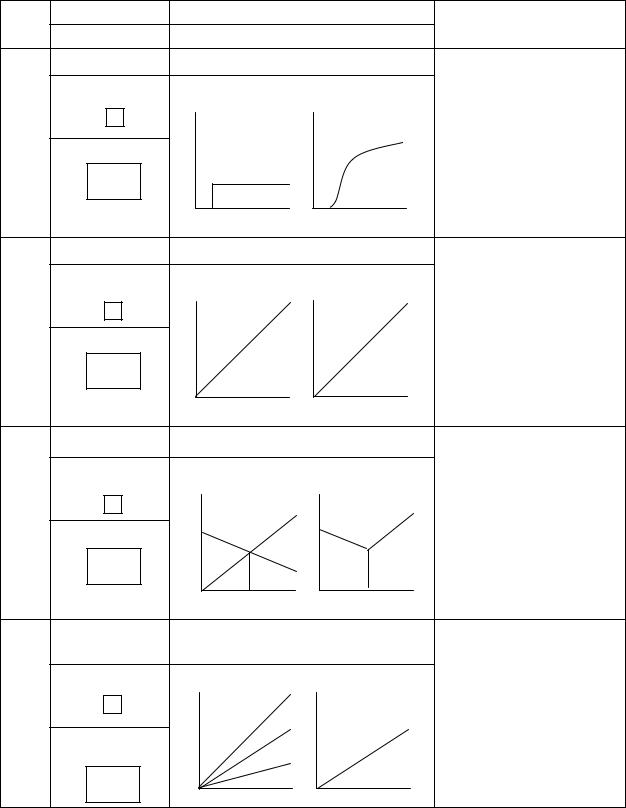
Table 5.6 — Signal processing function block symbols
Note: Numbers in parentheses refer to explanatory notes in Clause 5.3.6.
No |
Function |
|
Equation |
|
|
Definition |
|||
Symbol (1) (2) |
|
|
Graph |
|
|
||||
|
|
|
|
|
|
|
|
||
|
Time function |
|
M = Xƒ(t) |
|
• |
Output equals a nonlinear or |
|||
13 |
|
|
|
|
|
|
unspecified |
time function times |
|
|
|
|
|
|
|
|
the input. |
|
|
|
|
|
|
|
|
• |
Output is a nonlinear or |
||
|
ƒ(t) |
X |
|
M |
|
|
unspecified time function. |
||
|
|
|
• |
Function defined in note or other |
|||||
|
|
|
|
|
|
|
text. |
|
|
|
ƒ(t) |
|
|
|
|
|
|
|
|
|
|
t1 |
t |
t1 |
|
t |
|
|
|
14 |
Conversion |
|
I = P, P = I, etc |
|
• |
Output signal type different from |
|||
|
|
|
|
|
|
that of input signal. |
|||
|
|
|
|
|
|
• |
Input signal is on the left and |
||
|
|
|
|
|
|
|
output signal is on the right. |
||
|
I/P |
X |
|
M |
|
• |
Substitute any of the following |
||
|
|
|
|
signal types for ‘P’ or ‘I’: |
|||||
|
|
|
|
|
|
• |
A = Analog H = Hydraulic |
||
|
|
|
|
|
|
• |
B = Binary |
I = Current |
|
|
|
|
|
|
|
• |
D = Digital |
O = Electromagnetic |
|
|
I/P |
|
|
|
|
• |
E = Voltage |
P = Pneumatic |
|
|
|
|
|
|
• |
F = Frequency |
R = Resistance |
||
|
|
|
|
|
|
||||
|
|
|
t |
|
|
t |
|
|
|
|
High signal select |
|
M = X1 for X1 >X2 |
|
• |
Output equals |
greater of 2 or |
||
15 |
|
M = X2 for X1 ≤ X2 |
|
|
more inputs. |
|
|||
|
|
|
|
|
|||||
|
> |
X |
|
M |
|
|
|
|
|
|
|
|
|
X1 |
|
|
|
|
|
|
> |
|
|
X2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t1 |
t |
t1 |
t |
|
|
|
|
|
|
M = X1 for X2 >X1 >X3 or X3 >X1 >X2 |
Output equals middle value of three or |
|||||
16 |
Middle signal select |
|
M = X2 for X1 >X2 >X3 or X3 >X2 >X1 |
more inputs. |
|
|
|||
|
|
|
M = X3 for X1 >X3 >X2 or X2 >X3 >X1 |
|
|
|
|
||
|
M |
X |
X2 |
M |
|
|
|
|
|
|
|
|
X1 |
|
|
|
|
|
|
|
|
|
X3 |
|
|
|
|
|
|
|
M |
|
|
|
|
t |
|
|
|
|
|
|
|
t |
|
|
|
|
|
Copyright International Society of Automation |
|
Provided by IHS under license with ISA |
|
No reproduction or networking permitted without license from IHS |
Not for Resale |
--`,,```,,,,````-`-`,,`,,`,`,,`---
//^:^^#^~^^"#@::"~^$:~@""#:$@^"*^~@~$"~~""^^:@^^:#^~~\\