

Бурлака, Кучеренко, Мазоренко, Тищенко, Основы теории механизмов и машин
.pdfРаздел 8. Уравновешивание механизмов. |
301 |
ЛЕКЦІЯ 16
СОДЕРЖАНИЕ
8. Уравновешивание механизмов.
8.1.Задачи уравновешивания механизмов.
8.2.Виды неуравновешенности механизмов.
8.3.Метод заменяющих масс.
8.4.Статическое уравновешивание механизмов.
8.5.Моментное уравновешивание механизмов.
8.1.Задачи уравновешивания механизмов.
Как было показано в главе 4, на реакции в кинематических парах звеньев кроме активных сил (сил тяжести, сил производственных сопротивлений и т.д.) влияют и силы инерции. При работе машины звенья ее механизмов двигаются с ускорениями, в результате возникающие силы инерции вызывают дополнительные, иногда очень большие, нагрузки в кинематических парах, увеличивают трение и износ ее элементов, создают дополнительные напряжения в отдельных частях машины. Дополнительные нагрузки в кинематических парах, вызванные движением звеньев называют динамическими. Динамические нагрузки неизбежно снижают выносливость материала звеньев и приводят к его разрушению.
При установившемся режиме движения динамические составляющие реакций в кинематических парах изменяются циклически. Поскольку рядом кинематических пар механизм связан с основанием (стойкой), то динамические нагрузки передаются на его основание (корпус машины, фундамент), вызывая его вибрацию, колебания и расшатывание. Особенно опасны вибрации в зоне близкой к резонансу, что может вызвать
302 |
Лекция 16 |
разрушение не только деталей машины, но и рядом стоящих сооружений.
Поэтому при проектировании и изготовлении машин ставится задача о полном или частичном гашении динамических нагрузок вызванных движением звеньев и
называют эту задачу уравновешиванием подвижных масс механизма или уравновешиванием сил инерции.
Решается эта задача путем рационального распределения и подбора масс звеньев механизма.
Задачу по уравновешиванию сил инерции в механизмах можно разделить на две части:
уравновешивание динамических нагрузок от машины или механизма на фундамент;
уравновешивание динамических нагрузок в кинематических парах.
Уравновешивание динамических нагрузок в кинематических парах механизма в общем случае вызывает большие сложности, поэтому эта задача решается только для звеньев, которые совершают вращательное движение (роторов). Называется эта задача
уравновешиванием ротора. Экспериментальное определение неуравновешенности ротора и ее устранение получило название балансировки ротора.
8.2. Виды неуравновешенности механизмов
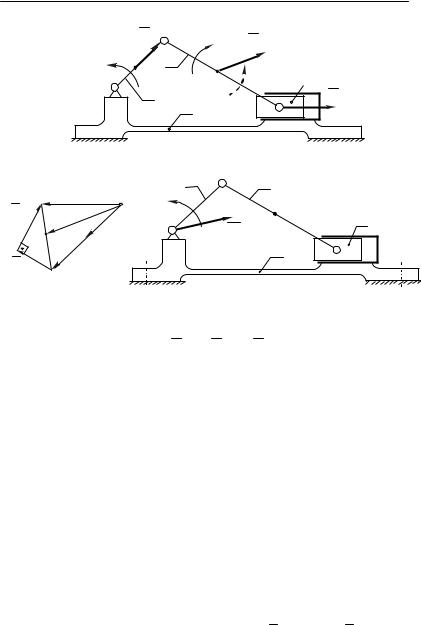
Рассмотрим плоский механизм (рис. 8.1,а), начальное звено 1 которого вращается с постоянной угловой скоростью 1. При этом звено 2 будет двигаться с угловым ускорением 2 , а центры масс S1, S2 , S3
звеньев 1, 2, 3 будут иметь линейные ускорения (план ускорений для данного положения механизма показан на рис. 8.1,б).
|
Раздел 8. Уравновешивание механизмов. |
|
303 |
||||||||
|
|
|
F |
A |
M |
и2 |
Fи2 |
|
|
|
|
|
|
1 |
и1 |
|
|
|
|
||||
|
|
S |
2 |
|
|
|
|
|
|
|
|
|
|
|
S2 |
|
|
|
|
|
|||
|
|
О |
1 |
|
|
|
2 B |
3 |
|
|
|
|
|
1 |
|
|
|
|
|
||||
|
C |
|
0 |
|
|
S3 |
Fи3 |
D |
|
||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
а) |
|
|
|
|
|
|
b,s3 |
|
|
Mи |
1 |
A |
|
2 |
|
|
|
|
|
|
|
|
S2 |
|
|
|||||
BA |
|
|
О |
|
Фи |
|
3 |
|
|||
s |
s1 |
|
|
|
|
|
|||||
|
|
|
|
|
|
||||||
2 |
|
|
|
|
|
0 |
B |
|
|
||
nBA |
C |
|
|
|
|
|
D |
||||
|
|
|
|
|
|
|
|||||
a |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
в) |
|
|
|
|
|
|
|
|
Рис. 8.1. |
|
|
|
|
|
|
|
Силы инерции Fи1, Fи2, Fи3 |
звеньев 1, |
2, 3 |
||||||||
направлены |
противоположно |
линейным ускорениям |
|||||||||
центров масс S1, S2 , S3 соответственно, а момент сил |
|||||||||||
инерции Mи2 |
второго звена направлен противоположно |
||||||||||
угловому ускорению 2 . Поскольку ранее было принято
1 const 1 0 , то Mи1 JS1 1 0.
Приведем всю систему сил инерции к центру неподвижной кинематической пары О , связанной со стойкой 0 (рис. 8.1,в). В результате рассматриваемая система сил инерции сведется к главному вектору:
|
|
|
|
|
|
|
|
n |
|
|
|
Ф |
и Fи1 Fи2 Fи3 Fиk |
(8.1) |
|||||||||
|
|
|
|
|
|
|
|
k 1 |
|
||
иглавному моменту:
Ми Mи2 MO Fи2 MO Fи3 ,

304 |
Лекция 16 |
|
|
или в общем виде: |
|
|
|
n |
n |
|
|
Ми Mиk MO |
Fиk , |
(8.2) |
|
k 1 |
k 1 |
|
|
где n – число подвижных звеньев механизма.
Таким образом, на стойку 0 механизма действует переменная во времени (циклически изменяющаяся)
нагрузка, выражающаяся главным вектором Фи и
главным моментом Mи сил инерции. При этом
необходимо отметить, что силы, нагружающие основание, фактически приложены в тех местах, где стойка 0 крепится к основанию, т.е. к фундаментным болтам в точках C и D (рис. 8.1,в). Поэтому Фи и Mи – чисто расчетные
величины, характеризующие лишь суммарный результат динамического воздействия механизма на его основание.
|
|
Если |
главный вектор сил инерции механизма |
|||
|
|
и 0, |
|
|
|
статически |
Ф |
то |
такой механизм |
называют |
|||
неуравновешенным. (Главный момент сил инерции Mи в |
||||||
этом случае так же будет не равен нулю). |
|
|||||
|
|
Для статического уравновешивания механизма на |
||||
стадии |
его |
проектирования |
путем |
закрепления |
||
дополнительных масс на подвижных звеньях механизма или соответствующим образом изменения его схемы добиваются равенства нулю главного вектора сил инерции
Фи 0 .
Отметим, что при этом не ставится задача достижения равенства нулю главного момента сил инерции Ми 0 . Следовательно, статически
уравновешенный механизм никакого динамического воздействия на свое основание в виде силы не оказывает.

305
Однако, такой механизм в общем случае продолжает оказывать динамическое воздействие на свое основание в виде момента. Поэтому, статически уравновешенный механизм иногда называют механизмом с моментной неуравновешенностью.
Из теоретической механики известно, что главный вектор сил инерции механической системы равен:
Фи maS ,
где m – масса системы подвижных звеньев механизма; aS – ускорение центра масс S системы подвижных
звеньев механизма.
Отсюда следует, что равенство нулю главного вектора сил инерции возможно только в том случае, когда ускорение центра масс системы подвижных звеньев механизма будет равно нулю aS 0 . Ускорение любой
точки может равняться нулю в двух случаях:
если точка неподвижна;
если точка движется равномерно и прямолинейно.
Учитывая, что никакая точка в механизме не может продолжительное время двигаться (относительно стойки) равномерно и прямолинейно, то центр масс механизма должен быть неподвижен.
Таким образом, статическое уравновешивание заключается в таком закреплении дополнительных масс на звеньях механизма или в таком изменении его схемы, при котором центр масс подвижных звеньев становится неподвижным.
Теперь рассмотрим моментное уравновешивание
механизма. Необходимо отметить, что моментное

306 |
Лекция 16 |
уравновешивание не выполнимо на статически неуравновешенном механизме, поскольку величина главного момента Mи сил инерции, который необходимо
уравновесить, будет разной в зависимости от выбранного центра приведения. Действительно, если относительно точки О , главный вектор сил инерции и главный момент сил инерции равны Фи и Mи O соответственно, то
относительно произвольной точки, например B, главный момент сил инерции будет равен:
Mи B Mи O MВ Фи .
Вслучае же статически уравновешенного механизма, когда главный момент сил инерции
определяется при условии Фи 0, то его величина не
зависит от выбора центра приведения, т.е. в качестве последнего можно выбрать любую точку, а не обязательно точку О .
Таким образом, моментное уравновешивание механизма можно выполнить на статически уравновешенном механизме если создать с помощью двух дополнительных сил (пары сил) момент, который будет равен но противоположно направлен главному моменту Mи сил инерции.
Дополнительный момент создается силами инерции двух корректирующих масс, закрепленных на звеньях механизма (см. раздел 8.5).
Врезультате моментного уравновешивания
получим механизм, в котором Фи 0 и |
Ми 0, т.е. |
полностью уравновешенный механизм. |
|
Раздел 8. Уравновешивание механизмов. |
307 |
8.3. Метод заменяющих масс |
|
При статическом уравновешивании |
механизмов |
широко используется метод, когда массу m любого звена, распределенную по всему его объему (рис. 8.2,а), заменяют
отдельными сосредоточенными массами mA |
и |
mB |
(рис. 8.2,б), которые располагают в характерных |
точках |
А |
и В звена (чаще всего в центрах кинематических пар).
В |
В |
|
S |
mB |
|
S |
||
А |
А |
|
mA |
||
а) |
||
б) |
||
Рис. 8.2. |
|
Для эквивалентности такой замены необходимо выдержать следующие условия:
масса звена должна равнять сумме заменяющих масс:
m mA mB ; |
(8.3) |
центр масс S заменяющей системы масс должен располагаться в том же месте, что и центр масс S заданного звена, т.е. статический момент масс mA и mB относительно точки S должен быть равен нулю:
mAlAS mBlBS 0,
или
mAlAS mBlBS . |
(8.4) |
Если условия (8.3) и (8.4) будут соблюдаться, то главный вектор сил инерции заданного звена, который
308 |
Лекция 16 |
равен произведению массы звена на ускорение центра масс, будет равен главному вектору сил инерции заменяющей системы масс mA и mB .
Поскольку при статическом уравновешивании учитываются только силы инерции звеньев (см. уравнение (8.1)) и не принимаются во внимание моменты сил инерции, то применительно к статическому уравновешиванию замена каждого звена двумя сосредоточенными массами является вполне корректной.
Решая совместно уравнения (8.3) и (8.4), определяем величины сосредоточенных масс в зависимости от их расположения относительно центра масс S звена.
Из (8.3) следует:
mB m mA .
Подставляя значение mB в (8.4), для массы, сосредоточенной в кинематической паре А, получим:
mAlAS m mA lBS mlBS mAlBS ;
mA lAS lBS mlBS ,
откуда |
|
|
|
|
|
|
|
|
|
mA m |
|
lBS |
m |
lBS |
. |
(8.5) |
|||
|
lAS lBS |
|
|||||||
|
|
|
|
|
lAB |
|
|||
Аналогично для массы, сосредоточенной в |
|||||||||
кинематической паре |
В, получим: |
|
|
|
|
||||
m |
B |
m |
lAS |
. |
|
|
|
(8.6) |
|
|
|
|
|
||||||
|
|
|
lAB |
|
|
|
|
||
|
|
|
|
|
|
|
|
||

Раздел 8. Уравновешивание механизмов. |
309 |
8.4. Статическое уравновешивание механизмов
Статическое уравновешивание шарнирного четырехзвенника
Требуется статически уравновесить шарнирный четырехзвенный механизм ОABC (рис.8.3,а), для которого заданы длины подвижных звеньев l1, l2, l3, их массы m1,
m2 , |
m3 и положения центров масс S1, S2 , S3 . |
|
|
|||||
|
2 S2 |
В |
|
|
|
2 |
В |
|
|
А |
3 |
|
|
А |
S |
mB |
3 |
|
S |
S3 |
|
|
|
|||
1 |
S |
|
1 |
m |
A |
|
|
|
|
|
|
|
|
||||
|
1 |
|
С |
О |
m |
aS |
m |
С |
О |
aS |
|
||||||
|
|
|
|
О |
|
С |
|
|
|
а) |
|
|
|
|
б) |
|
|
|
2 |
В |
|
|
|
2 |
В |
|
|
mB |
3 |
|
|
|
3 |
||
|
А |
|
А |
|
|
|||
1 |
mA |
|
С |
|
1 |
|
|
|
|
m |
m |
|
|
|
|
С |
|
О |
С |
|
О |
S |
m |
|
||
О |
|
mО |
С |
|
||||
mк1 |
lк1 |
lк3 |
mк3 |
|
|
|
|
|
в) |
|
|
|
г) |
|
|
||
Рис. 8.3.
Используя уравнения (8.5) и (8.6) заменим массу каждого из звеньев двумя сосредоточенными массами расположив их в центрах соответствующих кинематических пар (рис.8.3,б).
В кинематической паре О будет сосредоточена часть массы 1 звена:
mO m1lAS1 l1 . |
(8.7) |