7.3 Разработка диагностической модели системы питания Ford Mondeo III
Объект диагностирования рассматривается как преобразователь одних величин Y, которые вводятся в объект, в другие величины R, которые являются реакциями объекта . Таким образом, работу объекта диагностирования можно представить в следующем виде:
R = А Y (7.1)
где R, Y – векторы выходных и входных величин соответственно;
А – оператор объекта.
Если объект имеет конечное количество состояний К, то модель должна обеспечивать изменение выходного сигнала при неизменном входном сигнале в зависимости от i- го состояния. На объект диагностирования можно воздействовать разными тестовыми проверками Пj, что будет приводить к изменению реакции. Поэтому в общем виде следует записать:
 (7.2)
(7.2)
где  -
оператор объекта диагностирования или
его элемента при проведении Пj–ой
проверки и i-ом
отказе.
-
оператор объекта диагностирования или
его элемента при проведении Пj–ой
проверки и i-ом
отказе.
Если такое уравнение будет задано для всей совокупности проверок и отказов, то это будет явная диагностическая модель объекта.
Наиболее
простой формой представления модели
является таблица состояний. Она строится
следующим образом. Каждому отказу
соответствует состояние Si.
Поэтому столбцы соответствуют состояниям,
а строки - Пj
элементарным проверкам. В клетки таблицы
(i,
j)
заносится результат
 .
В первом столбце So
записываются реакции объекта контроля
на проверки при его исправном состоянии.
.
В первом столбце So
записываются реакции объекта контроля
на проверки при его исправном состоянии.
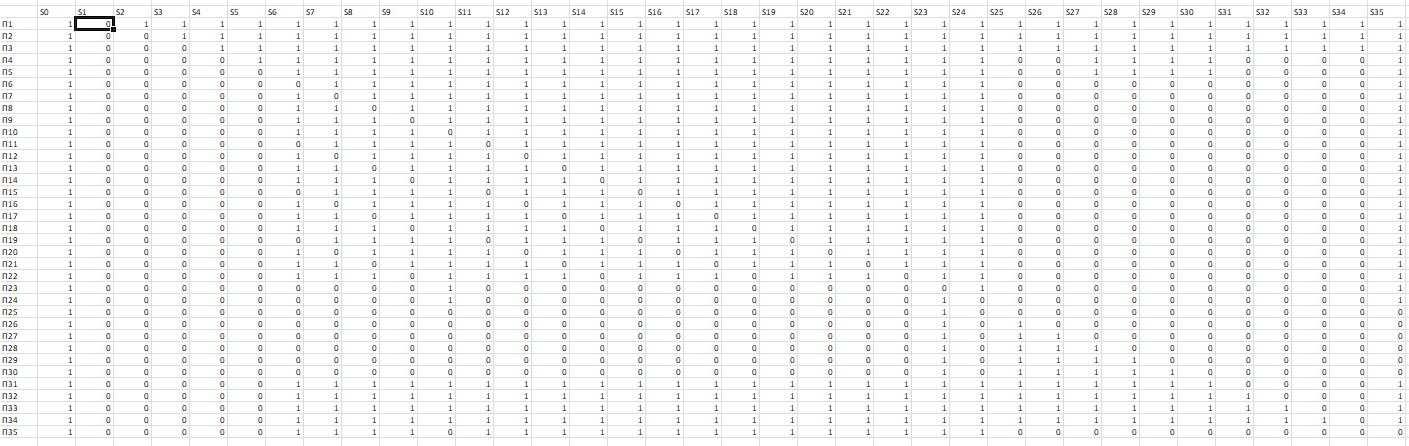
Если значения входа и выхода обозначить двойными логическими переменными, то они будут принимать значения «1», когда они допустимы, и «0» - когда не допустимы. Значения в таблице состояний будут принимать значения «0» или «1» в зависимости от состояния объекта.
Построение таблицы состояний происходит в несколько этапов. Первоначально рассматривается и анализируется функциональная схема объекта диагностирования. Здесь же необходимо принять решение о необходимости включения в формируемую логическую модель каждого из элементов функциональной схемы. Если элемент не влияет на работу схемы, то его можно исключить из дальнейшего рассмотрения.
Далее строится структурная схема по следующим формальным правилам:
а) если какой-либо входной (выходной) сигнал блока характеризуется несколькими параметрами, то каждый из этих параметров обозначается отдельным входом (выходом);
б) все блоки обозначаются Pi, входы Zi, выходы Хi;
в) если выход какого-либо блока, являющийся входом в другой блок, расщепляется на несколько выходов, то вход также расщепляется на такое же количество входов.
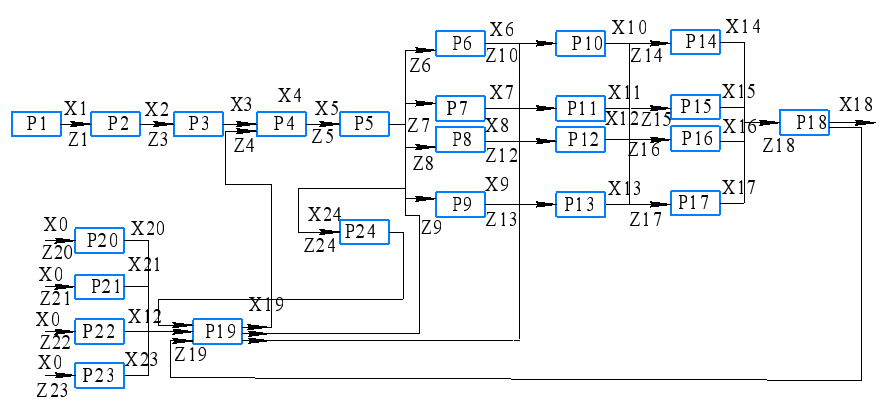
P1 - топливный бак, P2 - топливоподкачивающий насос, P3 - топливный фильтр, P4 – топливный насос высокого давления, P5–топливные рампа, P6…P9-свечи накала, P10…P13-форсунки, P14…P17-цилиндры, P18 – датчик содержания кислорода в ОГ, P19 – электронный блок управления, P20 – датчик температуры охлаждающей жидкости, P21 – датчик вращения коленчатого вала, P22 – датчик положения педали, P23 – датчик вращения распределительного вала, P24 – датчики давления в топливной системе.
Рисунок 7.8 – Структурная схема системы питания
Элементы системы питания в структурной схеме:
Далее составляем логическую модель.
Логическая модель получается на основе структурной схемы. При этом
необходимо соблюдать следующие формальные правила:
− блоки Рi заменяются на Qi;
− если блок Рi имеет несколько выходов, то он заменяется таким же количеством блоков, каждый из которых имеет один выход и существенные для него входы;
− выходы и входы i-х блоков представляются как Хi.

Q1 - топливный бак, Q2 - топливоподкачивающий насос, Q3 - топливный фильтр, Q4...Q5 - топливный насос высокого давления, Q6…Q10 -топливные рампа, Q11…Q14-свечи накала, Q15…Q18-форсунки, Q19…Q22- цилиндры, Q23...Q24 - датчик содержания кислорода в ОГ, Q25...Q30 -электронный блок управления, Q31 - датчик температуры охлаждающей жидкости, Q32 - датчик вращения коленчатого вала, Q33 - датчик положения педали, Q34 - датчик вращения распределительного вала, Q35 - датчики давления в топливной системе.
Рисунок 7.9 – Логическая модель системы питания
После построения логической модели объекта контроля необходимо для каждого ее блока записать уравнения типа:
Хi = QiFi, (7.3)
где Qi– оператор i-го логического объекта (принимаем значение «0», если блок неработоспособен и «1», если блок работоспособен);
Fi – функция условий работы i-го блока (тоже принимаем значение «0» или «1»).
X1=Q1; X2=Q2X1; X3=Q3X2; X4=Q4X3X22; X5=Q5 X3X23; X6=Q6X4;
X7=Q7X4X24; X8=Q8X4X25; X9=Q9X5X26; X10=Q10X5X27; X11=Q11X5;
X12=Q12X7;X13=Q13X8X31;X14=Q14X9;X15=Q15X10; X16=Q16X12;
X17=Q17X13; X18=Q18X14; X19=Q19X15; X20=Q20X16X17X18X19;
X21= Q21X16X17X18X19; X22=Q22X21X28X29X30 X31X32X33;
X23=Q23 X21X28X29X30 X31X32X33; X24=Q24 X21X28X29X30 X31X32X33;
X25=Q25 X21X28X29X30 X31X32X33; X26=Q26 X21X28X29X30 X31X32X33;
X27=Q27 X21X28X29X30 X31X32X33; X28=Q28X0; X29=Q29X0; X30=Q30X0; X31=Q31 X0; X32=Q32 X0; X33=Q33 X0; X34=Q34 X0; X35=Q35 X0;
Таблица состояний заполняется на основе уравнений. Их число должно равняться количеству блоков логической модели. Число строк принимается равным числу выходов блоков модели. Число столбцов принимается равным числу блоков логической модели плюс один, учитывающий исправное состояние.
Таблица 7.1 - Таблица состояний