

4. Исследование линеаризованной математической модели
Рассмотрим систему, представленную в канонической форме Коши:
![]() ,
,
где
![]()
Для линеаризации выбрали статический
режим ![]() ,
в окрестности которого проводится
линеаризация. А именно выбрали точку
,
в окрестности которого проводится
линеаризация. А именно выбрали точку
![]() .
.
Далее определили матрицы частных производных:

![]()
![]()
![]()
![]() – матрица состояний
– матрица состояний
![]() – матрица входов
– матрица входов
![]() – матрица выходов
– матрица выходов
![]() – матрица обхода
– матрица обхода
Матрицы ![]() имеют постоянные коэффициенты, зависящие
от статического режима.
имеют постоянные коэффициенты, зависящие
от статического режима.
В итоге, получили систему
![]()
Здесь переменные ![]() и
и ![]() называются приращениями (или отклонениями)
переменных
называются приращениями (или отклонениями)
переменных ![]() и
и ![]() относительно значений
относительно значений ![]() и
и ![]() .
.
СНДУ, записанные в форме Коши:

Уравнения выходов:
Как выходы в данной системе заданы ток
возбуждения ![]() и угловая скорость
и угловая скорость![]() .
.

![]()
![]()
![]()
![]()
![]() ;
;
![]()
![]() ;
;
![]() ;
;
![]()
![]()
![]() =
=![]() ;
;
![]() =
=![]()
Уравнения f(x,u):



![]()
![]()
Текст программы:
%%lab4
clc
clear
%%исходные данные
global Ucn Uvn Ce r_j r_v w l_j J k Cm Mcn Wn Potokn In p p2 a10 a11 a20 a21 a22 a23 a30 a31 a32 b1 b2
potok=[0;0.35;0.57;0.72;0.83;0.91;0.97;1.01;1.06;1.07];
F=[0;0.1318;0.2636;0.3954;0.5272;0.659;0.7909;0.9227;1.0545;1.1863];
Ucn=220;% напряжение сети ном
Uvn=220; % напряжение возбуждения
Ce=205;
r_j=0.3; %сопротивление якоря
r_v=145; %сопротивление возбуждения
w=4000; %витки
l_j=0.1; %индуктивность якоря
J=0.35; %момент инерции
k=4000;
%%номинальные данные
Cm=200;
Mcn=50;%номинальный поток сопротивления
Wn=100;%обороты номинальные
Potokn=0.007;%номинальный поток, Вб
In=50;%номинальный ток двигателя
%%полином 5 степени
p=[0.6010 0 -0.1446 0 0.4384 0];
p2=polyder(p);
a10 = Uvn/(Potokn*w);
a11 = Uvn;
a20 = 1/(In*l_j);
a21 = Ucn;
a22 = Ce*Wn*Potokn;
a23 = In*r_j;
a30 = 1/(Wn*J);
a31 = Cm*Potokn*In;
a32 = Mcn;
b1 = Uvn/r_v*w;
b2 = Wn;
%% Uc+20%
t = [0:0.01:6];
x0=[0; 0; 0];
u1 = 0.2; u2 = 0;
u = [u1*ones(size(t)); u2*ones(size(t))];
x = [1.04; 0.22; 0.463];
P = polyval(p2,x(1));
%%матрицы A B C D
A = [-a10*P, 0, 0; -a22*a20*x(3), -a23*a20, -a22*a20*x(1); a30*a31*x(2),a30*a31*x(1), 0];
B = [0, 0; a21*a20, 0; 0, -a32*a30];
C = [b1*P, 0, 0; 0, 0, b2];
D = [0,0;0, 0];
[Y, X] = lmsim(A,B,C,D,t,x0,u);
figure(1); hold on; plot(t,(X(3,:)+x(3))); grid on; xlabel('t,с');ylabel('W, об/мин');
figure(2); hold on; plot(t,(X(2,:)+x(2))); grid on; xlabel('t,с');ylabel('iд, А');
figure(3); hold on; plot(t,(X(1,:)+x(1))); grid on; xlabel('t,с');ylabel('Ф, Вб');
figure(4); hold on; p = poly(A); lmd = roots(p); xlabel('Re');ylabel('Im');
plot(real(lmd),imag(lmd),'*'); grid on;
%% Uc-20%
t = [0:0.01:6];
x0=[0; 0; 0];
u1 = -0.2; u2 = 0;
u = [u1*ones(size(t)); u2*ones(size(t))];
x = [1.04; 0.22; 0.463];
P = polyval(p2,x(1));
%%матрицы A B C D
A = [-a10*P, 0, 0; -a22*a20*x(3), -a23*a20, -a22*a20*x(1); a30*a31*x(2),a30*a31*x(1), 0];
B = [0, 0; a21*a20, 0; 0, -a32*a30];
C = [b1*P, 0, 0; 0, 0, b2];
D = [0,0;0, 0];
[Y, X] = lmsim(A,B,C,D,t,x0,u);
figure(1); hold on; plot(t,(X(3,:)+x(3))); grid on; xlabel('t,с');ylabel('W, об/мин');
figure(2); hold on; plot(t,(X(2,:)+x(2))); grid on; xlabel('t,с');ylabel('iд, А');
figure(3); hold on; plot(t,(X(1,:)+x(1))); grid on; xlabel('t,с');ylabel('Ф, Вб');
Функция lmsim:
function [y,x]=lmsim(a,b,c,d,t,x0,u)
%
% simulation of linear system
%
% dx(t)/dt=Ax(t)+Bu(t)
% y(t)=Cx(t)+du(t)
%
% x(0)=x0
%
% t - vector-string of simulation time
% x0 - vector-column of initial conditions
% u - matrice of controls (number of columns is equal to length of vector t
% number of strings is equal to number of outputs)
%
%
h=t(2)-t(1);
% matrix exponent
[m,n] = size(a);
[m,nb] = size(b);
s = expm([[a b]*h; zeros(nb,n+nb)]);
p = s(1:n,1:n);
g= s(1:n,n+1:n+nb);
%
% time process
%
x=(ltitr(p,g,u',x0'))';
y=c*x+d*u;
Результаты реализации программы и моделирования приведены на Рис.15-22.
Динамический режим(+20%Uc)
Переходные процессы переменных состояния:


Рис.15 – Сравнение магнитного потока линеаризованной(слева) и нелинейной систем


Рис.16 – Сравнение тока двигателя линеаризованной (слева) и нелинейной систем
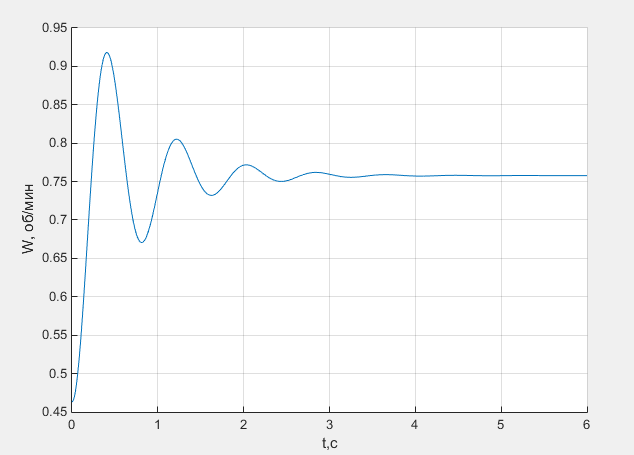

Рис.17 – Сравнение скорости вращения двигателя линеаризованной (слева) и нелинейной систем
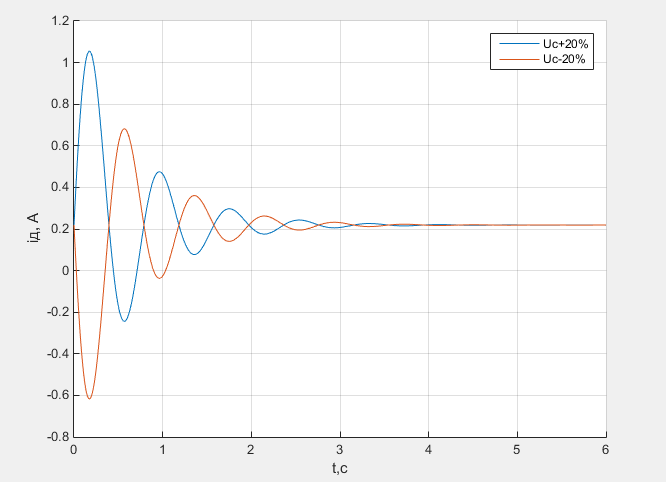
Рис.18 – График изменения тока двигателя при изменении входного воздействия на +/- 20%

Рис.19 – График изменения скорости двигателя при изменении входного воздействия на +/- 20%
Переходные процессы выходных значений (ток возбуждения и угловая скорость):

Рис.20 – Переходный процесс тока возбуждения

Рис.21 – Переходный процесс угловой скорости

Рис.22 – Корни полинома матрицы А
Переходные процессы полученной линеаризованной системы сходятся с результатами переходных процессов нелинейной системы с небольшими отклонениями. Система является устойчивой по Ляпунову, т.к. вещественные части всех собственных чисел матрицы А являются отрицательными.