

Лабораторные / lab3
.docxМИНОБРНАУКИ РОССИИ
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ
ЭЛЕКТРОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
«ЛЭТИ» ИМ. В.И. УЛЬЯНОВА (ЛЕНИНА)
Кафедра САУ
Лабораторная работа № 3
по дисциплине «Нелинейные системы управления»
Тема: «Коррекция нелинейных автоматических систем»
Вариант № 1
Студенты гр. 6408 |
|
Нуртазин И. Боголюбов Д.С |
Преподаватель |
|
Доброскок Н.А. |
Санкт-Петербург
2019
Цель работы: исследование влияния нелинейных корректирующих устройств на свойства линейной системы и влияния линейных корректирующих устройств на свойства нелинейной системы; исследование коррекции нелинейной системы нелинейными корректирующими устройствами.
Исходные данные
Таблица
1
1. Изменяя коэффициент усиления пропорционального регулятора k в исходной системе получим различные варианты переходного процесса: от монотонного до колебательного.
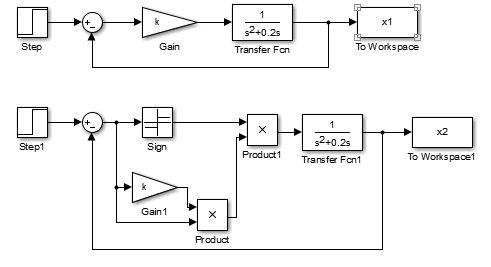
Рис.1.Структурная схема
 Рис.2.Переходные
характеристики системы с линейным
регулятором
Рис.2.Переходные
характеристики системы с линейным
регулятором
При k = 1 мы получаем значение tр= 39.38, вид процесса – колебательный.
При k = 0.02 мы получаем значение tр= 43.13, вид процесса – апериодический.
При k = 0.011 мы получаем значение tр= 51.56, вид процесса – монотонный.
Рис.3.Переходные характеристики системы с корректирующим устройством
При k = 0.5 мы получаем значение tр= 49.54. , вид процесса – колебательный.
При k = 0.1 мы получаем значение tр= 36.25, вид процесса – апериодический.
При k = 0.03 мы получаем значение tр= 31.34, вид процесса – монотонный.
Монотонный процесс с максимальным быстродействием в скорректированной системе получается при выборе k=0.033 ( tр = 26.95).
Рис.4.Переходная характеристика
монотонный
процесс с максимальным быстродействием.
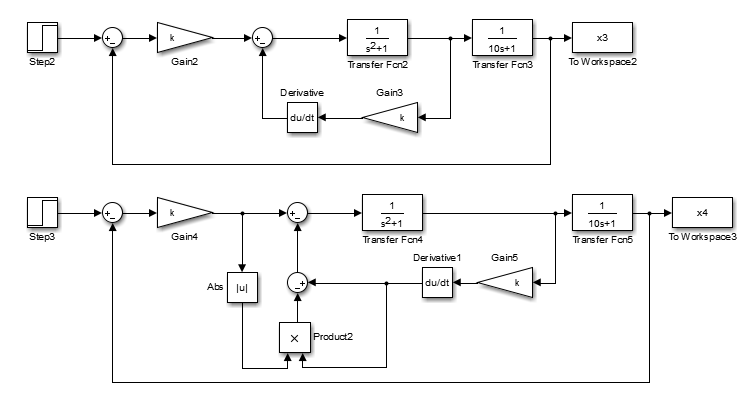
Рис.5.Структурные схемы
Рис.6.Переходная характеристика для монотонного процесса с максимальным быстродействием в схеме с линейной ОС и схеме с нелинейным КУ.
Соответственно, переходной характеристикой для монотонного процесса с максимальным быстродействием является характеристика схемы с нелинейным КУ при kос=4.2; tр=11.47
3. Исследование влияния местной ОС путем изменения коэффициента ОС.
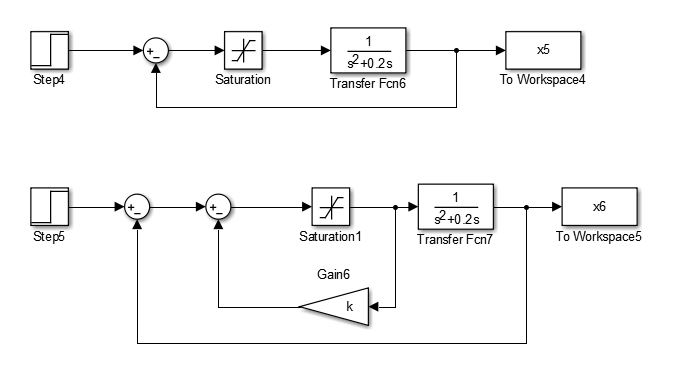 Рис.7.Структурные
схемы
Рис.7.Структурные
схемы
Рис.8.Переходная характеристика в системе без коррекции
Рис.9.Переходная характеристика в системе с местной ОС
Вывод: при введении нелинейного корректирующего устройства увеличивается быстродействие системы. При коррекции нелинейных характеристик линейным корректирующим устройством можно добиваться различных процессов с различными показателями качества путём изменения коэффициента ОС.