

Лабораторные работы / 1 лабораторная
.docxМИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра САУ
отчет
по лабораторной работе № 1
по дисциплине «Моделирование гребных электрические установки»
Тема: КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ ГРЕБНОЙ ЭЛЕКТРИЧЕСКОЙ УСТАНОВКИ ПЕРЕМЕННОГО ТОКА С ЭЛЕКТРОДВИГАТЕЛЕМ АСИНХРОННОГО ТИПА И ПОЛУПРОВОДНИКОВЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ
ВАРИАНТ № 4
Маратов М.
Студенты гр. 6408 |
|
Попов М.М. Нуртазин И. |
Преподаватель |
|
Малышев С.М. |
Санкт-Петербург
2019
Цель работы: Изучение, на компьютерной модели ГЭУ двойного рода тока с широтно-импульсным преобразователем и двигателем постоянного тока, разработанной в среде Simulink.

Рис.1 – Компьютерная модель ГЭУ с асинхронным ГЭД
Компьютерная модель состоит из следующих основных блоков:
1. Дизель-генератор (блок трёх-фазного источника 690 В, 50Гц);
2. Полупроводниковый преобразователь частоты (блок Convertor);
3. Блок измерения (Measurements) - применяется для извлечения переменных ГЭД из вектора измеряемых переменных электрической машины;
4. Виртуальный осциллограф (блок визуализации результатов расчёта Scope);
5. Эквивалентная модель асинхронного двигателя;
6. Блок изменения характера нагрузки (блок Propeller);
В качестве нагрузки используется гребной винт фиксированного шага с механической характеристикой представленной на рисунке 3.
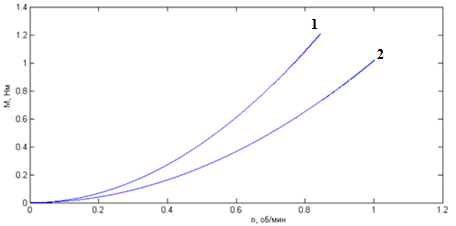
Рис. 2 – Винтовые характеристики
1 – швартовная характеристика; 2 – характеристика хода в свободной воде
Структурная схема полупроводникового преобразователя частоты (блок Convertor) приведена на рисунке 4.
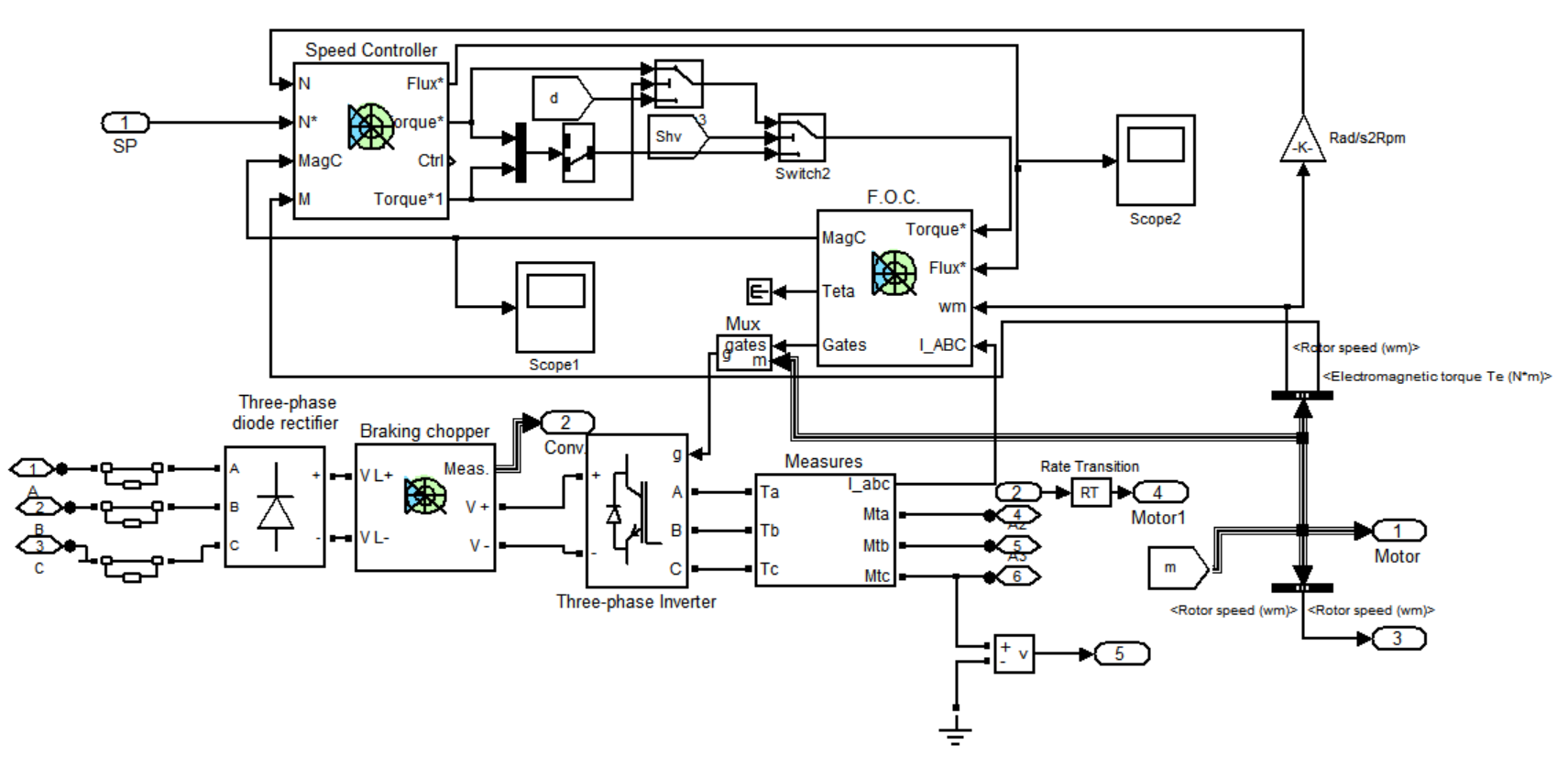
Рис. 3 – Структурная схема полупроводникового преобразователя частоты
(блок Convertor)
Состав компьютерной модели полупроводникового преобразователя частоты приведен в таблице 1.
Таблица 1 – Состав компьютерной модели преобразователя частоты
Пиктограмма |
Краткое описание и назначение |
|
Контроллер Назначение – регулирование частоты вращения электродвигателя. |
|
Модуль векторного регулирования привода Назначение – формирует алгоритм работы ключей инвертора
|
|
Мостовой неуправляемый диодный выпрямитель. Назначение – преобразование трехфазного переменного напряжения в постоянное. |
|
Мостовой инвертор на базе IGBT- транзисторов Назначение – преобразование постоянного напряжения в переменное. |
|
Тормозное сопротивление с транзистором (чоппер) Назначение – стабилизация напряжение в звене постоянного тока. |


Табл. 2. Исходные данные
P*103, Вт |
Rs, Ом |
Ls, Гн |
Rr, Ом |
Lr, Гн |
Lm, Гн |
1050 |
0.0006 |
0.0281 |
5.18 |
0.26 |
0,0352 |
1.Расчет переходных процессов
Таблица 3
Режим |
tпуска, с |
tторм,с |
n |
m |
p |
Швартовный |
3 |
1 |
0.8 |
1 |
0.75 |
Свободная вода |
4 |
1.7 |
1 |
1 |
1 |
|
|
|
|
|
|
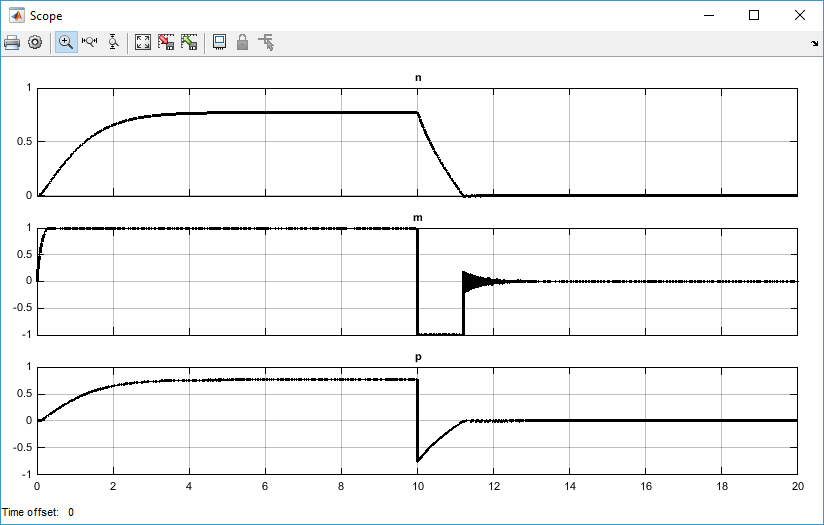
Рис.4 - Переходные характеристики в швартовном режиме
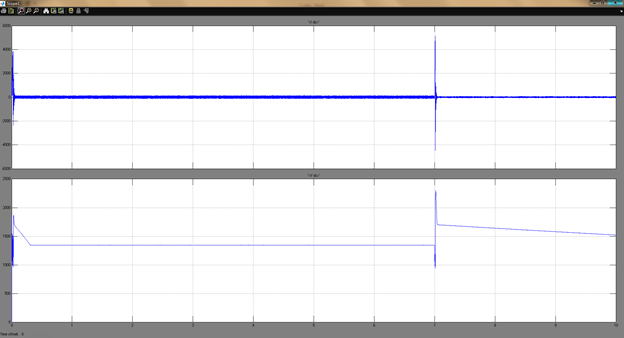
Рис. 5 - Переходные процессы напряжения и тока в швартовном режиме
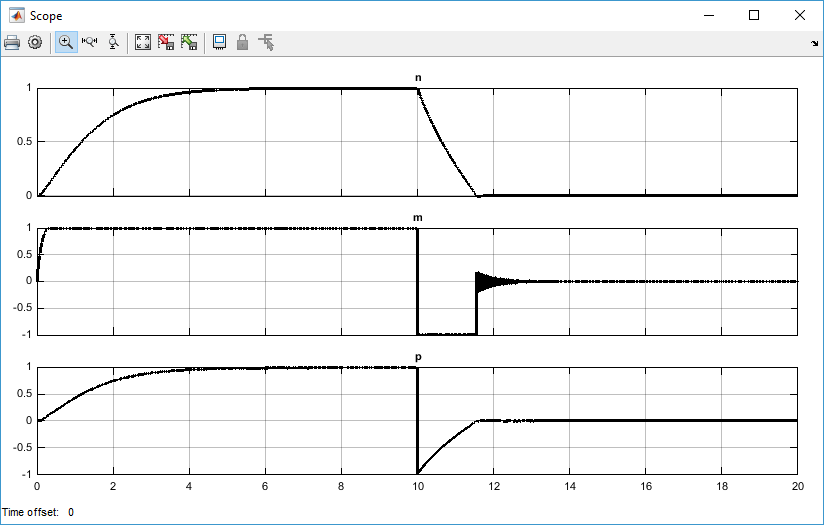
Рис. 6 - Переходные характеристики в режиме свободной воды
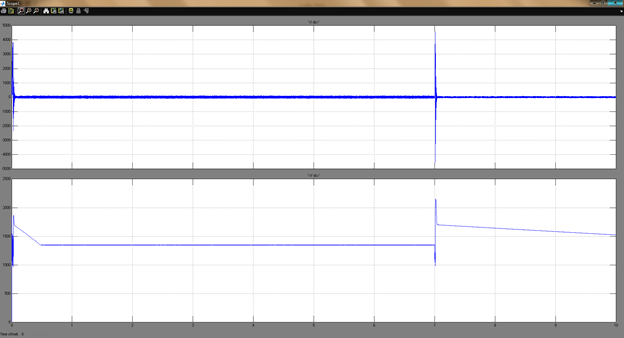
Рис. 7 - Переходные процессы напряжения и тока в режиме свободной воды
2.Компьютерное моделирование реверса ГЭУ на свободной воде
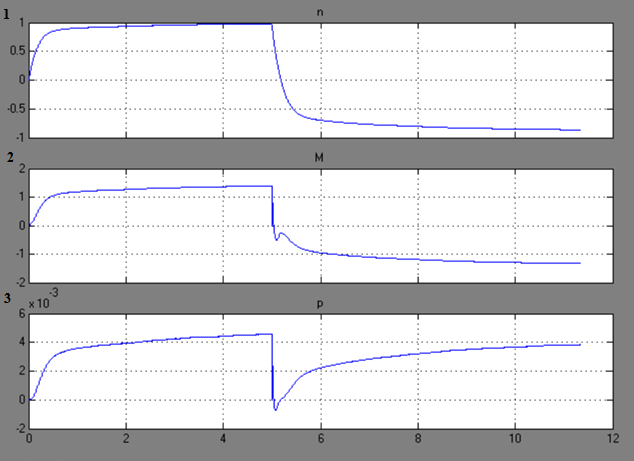
Рис. 8 - Переходные процессы пуска, торможения и реверса на свободной воде
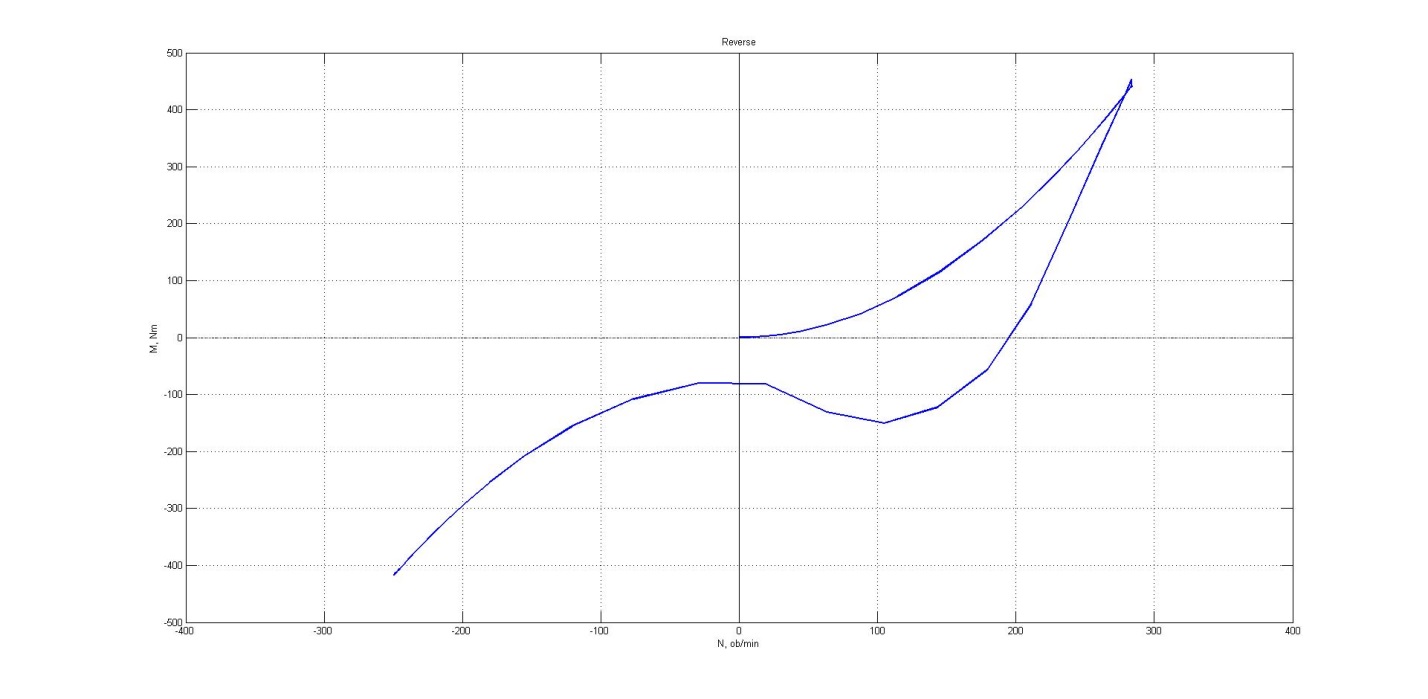
Рис. 9 - Винтовые характеристики гребного винта
3.Ход на волнении
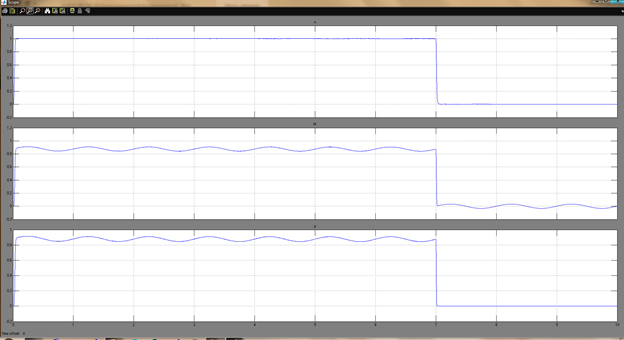
Рис. 10 - Переходные процессы при ходе в свободной воде на волнении (низкие)
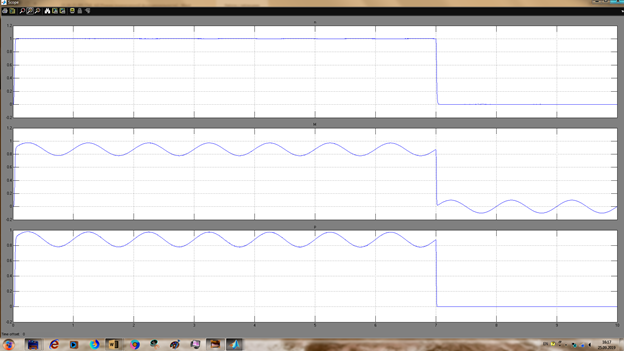
Рис. 11 - Переходные процессы при ходе в свободной воде на волнении (средние)
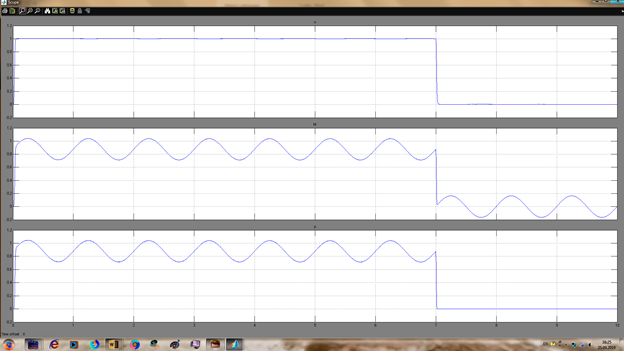
Рис. 12 - Переходные процессы при ходе в свободной воде на волнении (высокие)
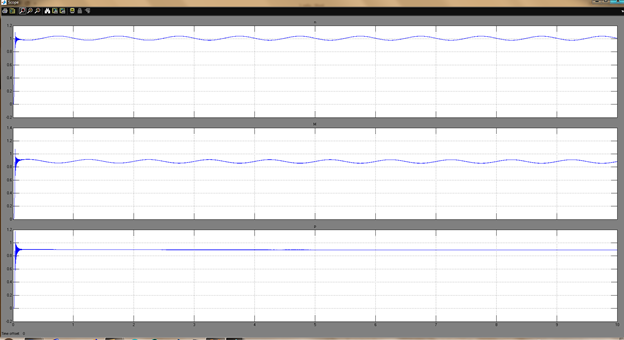
Рис. 13 - Переходные процессы при ходе в свободной воде на волнении при постоянной Р (средние)
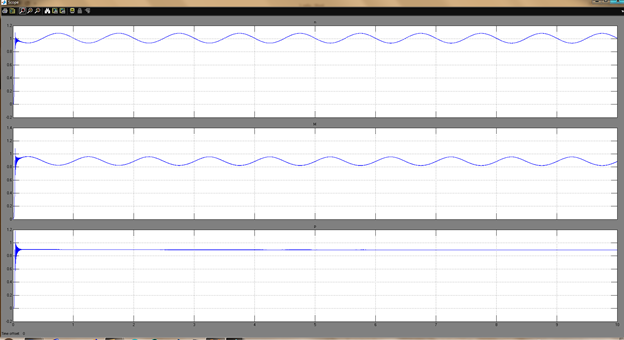
Рис. 14 - Переходные процессы при ходе в свободной воде на волнении при постоянной Р (высокие)
Таблица 4
Уровень волнений |
N, % |
P,% |
N,% |
P,% |
|||||
n=const |
Низкий |
|
|
|
|
||||
Средний |
|
|
|
|
|||||
Высокий |
|
|
|
|
|||||
p=const |
Средний |
|
|
|
|
||||
Высокий |
|
|
|
|
|||||
4.Аварийные режимы
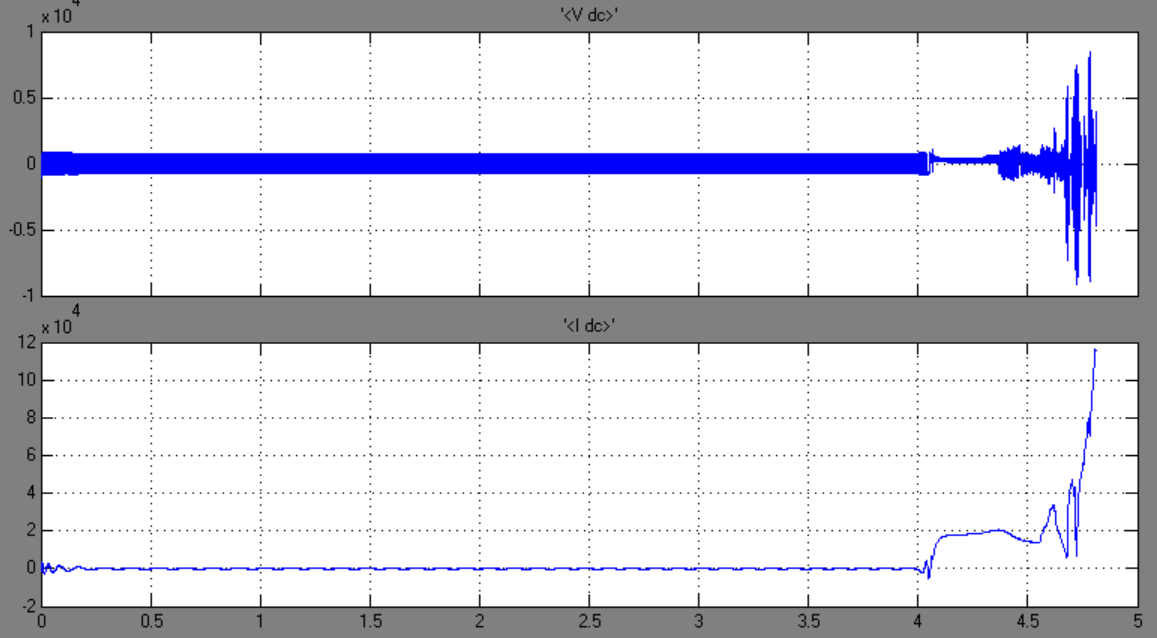
Рис. 15 - Переходный процесс аварийного режима заклинивания винта
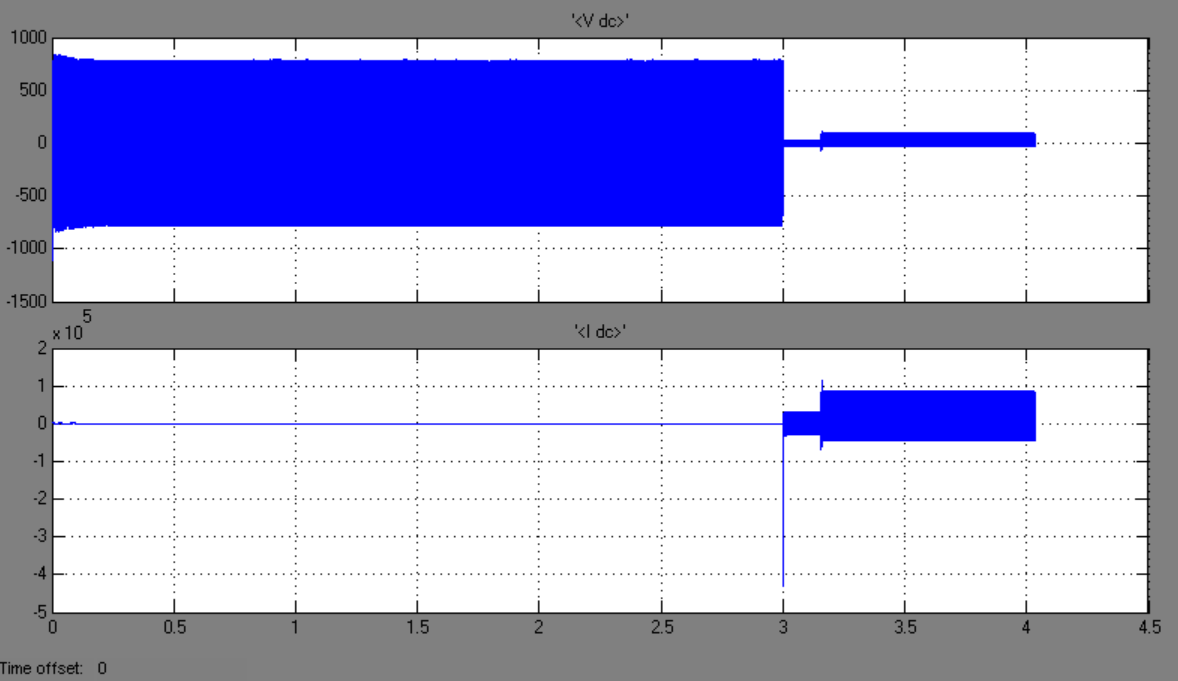
Рис. 16 - Переходный процесс аварийного режима обесточивания
5. Система автоматического управления ГЭУ
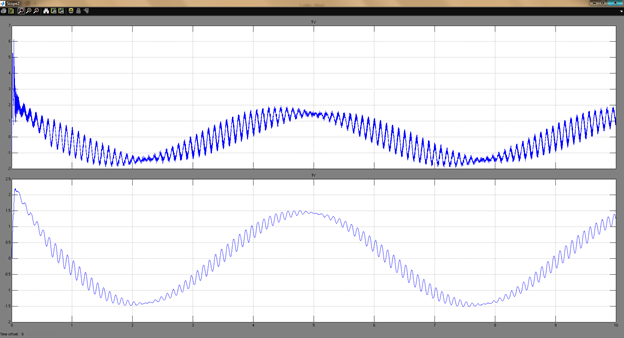
Рис. 17 - Переходный процесс магнитного потока ГЭД
Выводы: