

лабораторные / ЛР 5
.docxМИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра КСУ
отчёт
по лабораторной работе №5
по дисциплине «Математическое моделирование объектов и систем управления»
Тема: Моделирование нечётких систем
Вариант 1
Студенты гр. 6408 |
|
Нуртазин И. |
|
|
Попов М.М. Лукьянцов К. В. |
Преподаватель |
Шпекторов А.Г. |
Санкт-Петербург
2020
Цель работы: получить представление о способах создания нечетких моделей, изучить функции языка MATLAB библиотеки FUZZY LOGIC TOOLBOX, создать и исследовать нечеткую модель объекта управления.
Задание: Нечеткая модель управления автомобилем (система торможения). Объект управления – автомобиль. Он должен двигаться достаточно быстро, но при этом соблюдать дистанцию до автомобиля, едущего впереди. Входные переменные:
- расстояние до ближайшего впереди автомобиля;
- разница в скоростях (между скоростью автомобиля, управляемого нечеткой логикой и скоростью впереди едущего автомобиля);
- информация с датчика погоды («сухо», «дождь», «снег», «лед»);
Выходная переменная – сила торможения.
Ход работы:
Для начала мы создали нечёткий регулятор. На рисунке 1 представлен редактор Fuzzy Interface System.
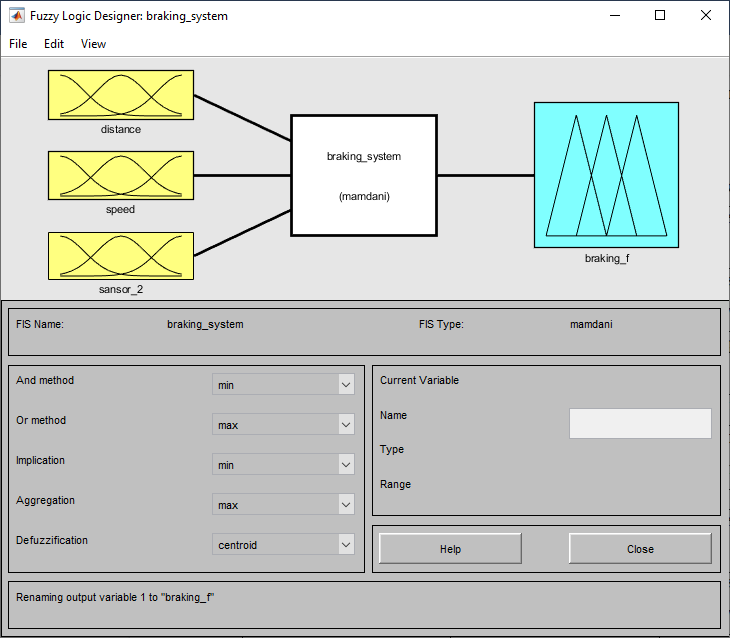
Рис. 1 – Редактор Fuzzy Interface System.
В таблице 1 представлен усечённый вариант переменных нечёткого регулирования.
Таблица 1. Усечённый вариант нечёткого регулятора.
Переменная |
Термы |
Distance |
Close; mid; far |
Speed |
low; high |
Sensor_2 |
Suxo; rain; snow; ice |
Braking_f |
No; medium; critical |
На рисунке 2 представлены правила FIS (В скобках указан удельный вес).
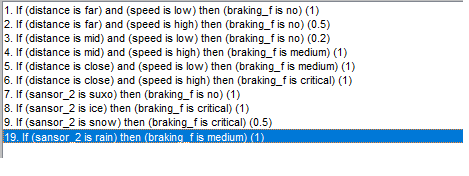
Рис. 2 – Правила усечённого варианта регулятора.
На рисунке 3 представлены Диаграммы нечеткого вывода для усеченного варианта регулятора. На рисунке 4 представлен график рабочей поверхности.
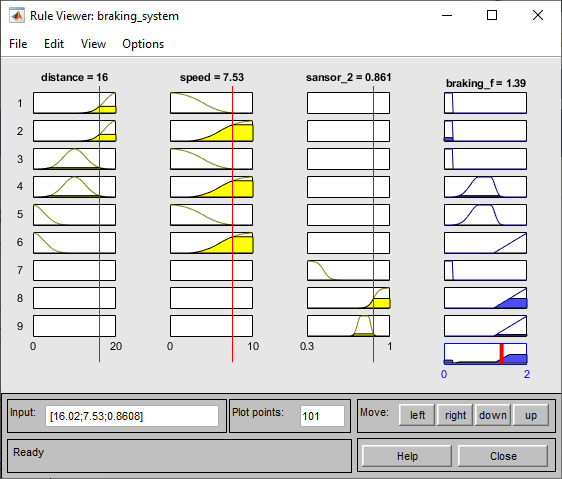
Рис. 3 – Диаграммы нечеткого вывода для усеченного варианта регулятора.
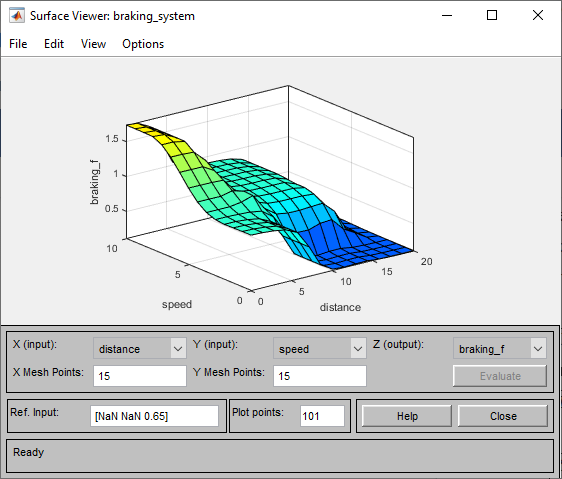
Рис. 4 – График рабочей поверхности усечённого варианта регулятора.
Перейдём к уточнённой нечёткой модели. В таблице 2 представлены переменные нечёткого регулятора уточнённого варианта.
Таблица 2. Уточнённый вариант нечёткого регулятора.
Переменная |
Термы |
Distance |
Close; close_mid; mid; far_mid; far |
Speed |
Low; average; high |
Sensor_2 |
Suxo; rain; snow; ice |
Braking_f |
No; medium; critical |
На рисунке 5 представлены правила FIS (В скобках указан удельный вес).
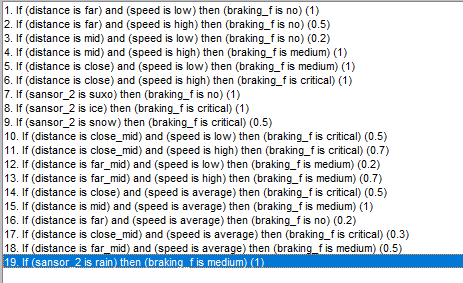
Рис. 5 – Правила уточнённого варианта регулятора.
На рисунке 6 представлены Диаграммы нечеткого вывода для усеченного варианта регулятора. На рисунке 7 представлен график рабочей поверхности.
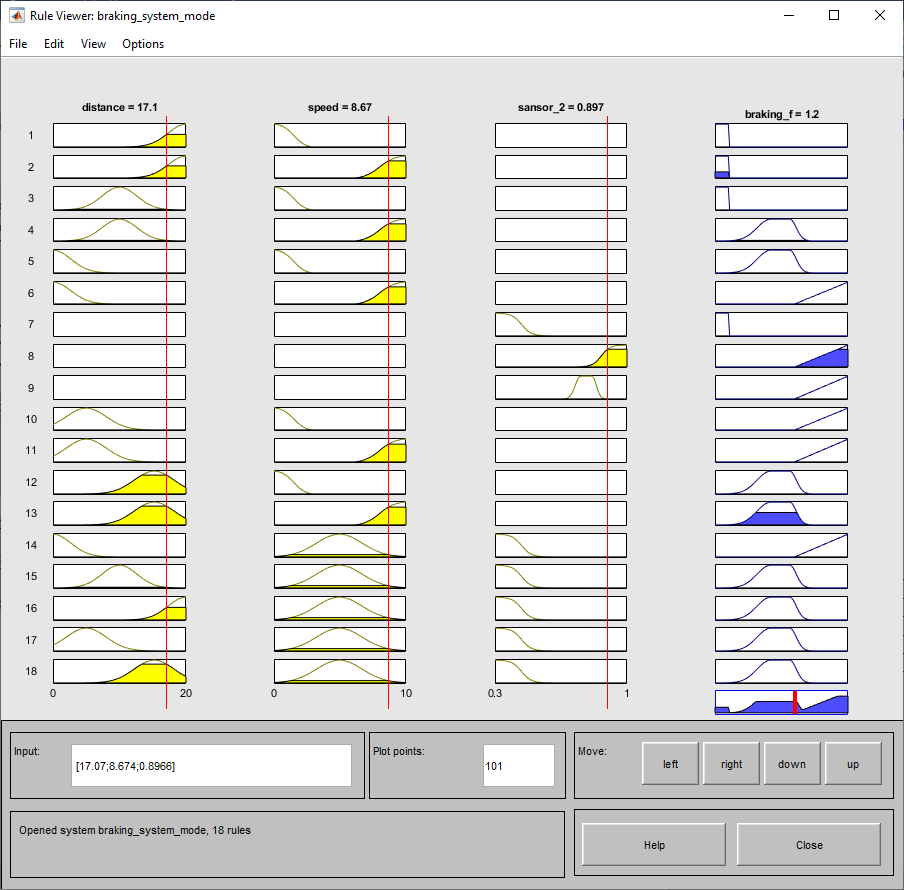
Рис. 6 – Диаграммы нечеткого вывода для усеченного варианта регулятора.
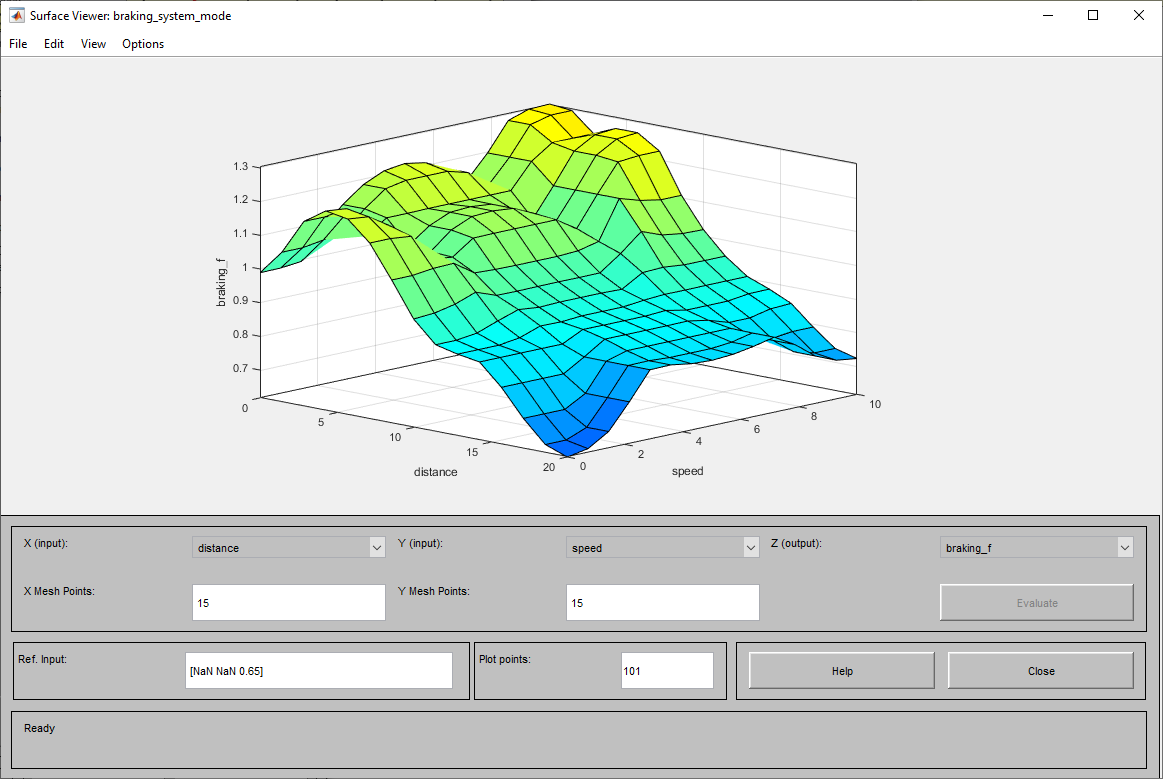
Рис. 7 – График рабочей поверхности усечённого варианта регулятора.
Рисунок 8 показывает функции термов FIS.
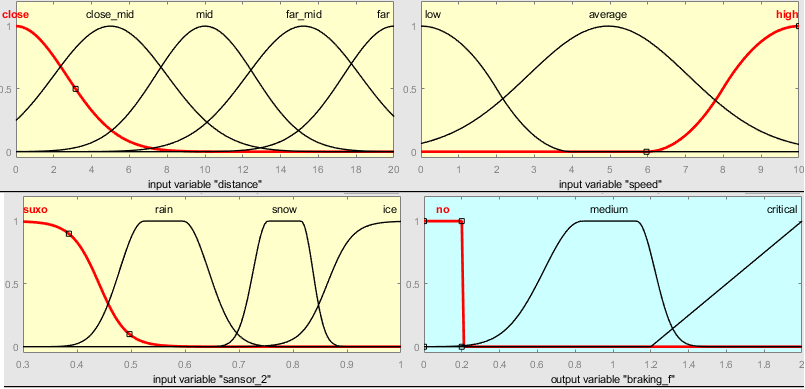
Рис. 8 – функции термов
На рисунке 9 представлена модель в Simulink. В ней мы использовали наш нечёткий регулятор, для получения результата, представленного на рисунке 10.
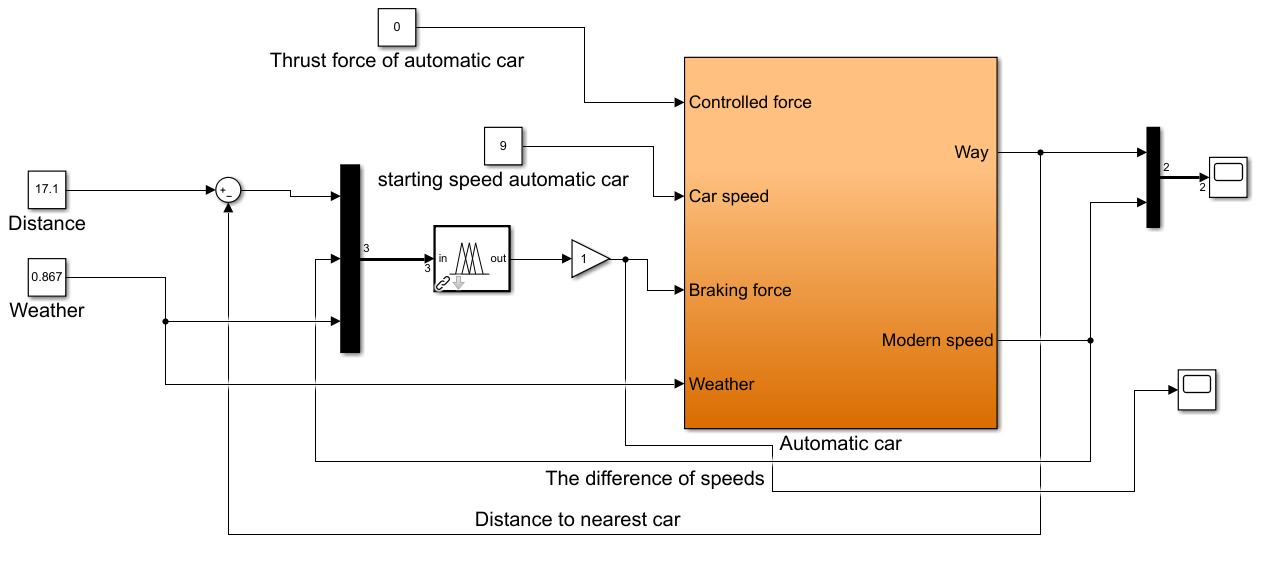
Рис. 9 – Модель управления силой торможения движущегося автомобиля.
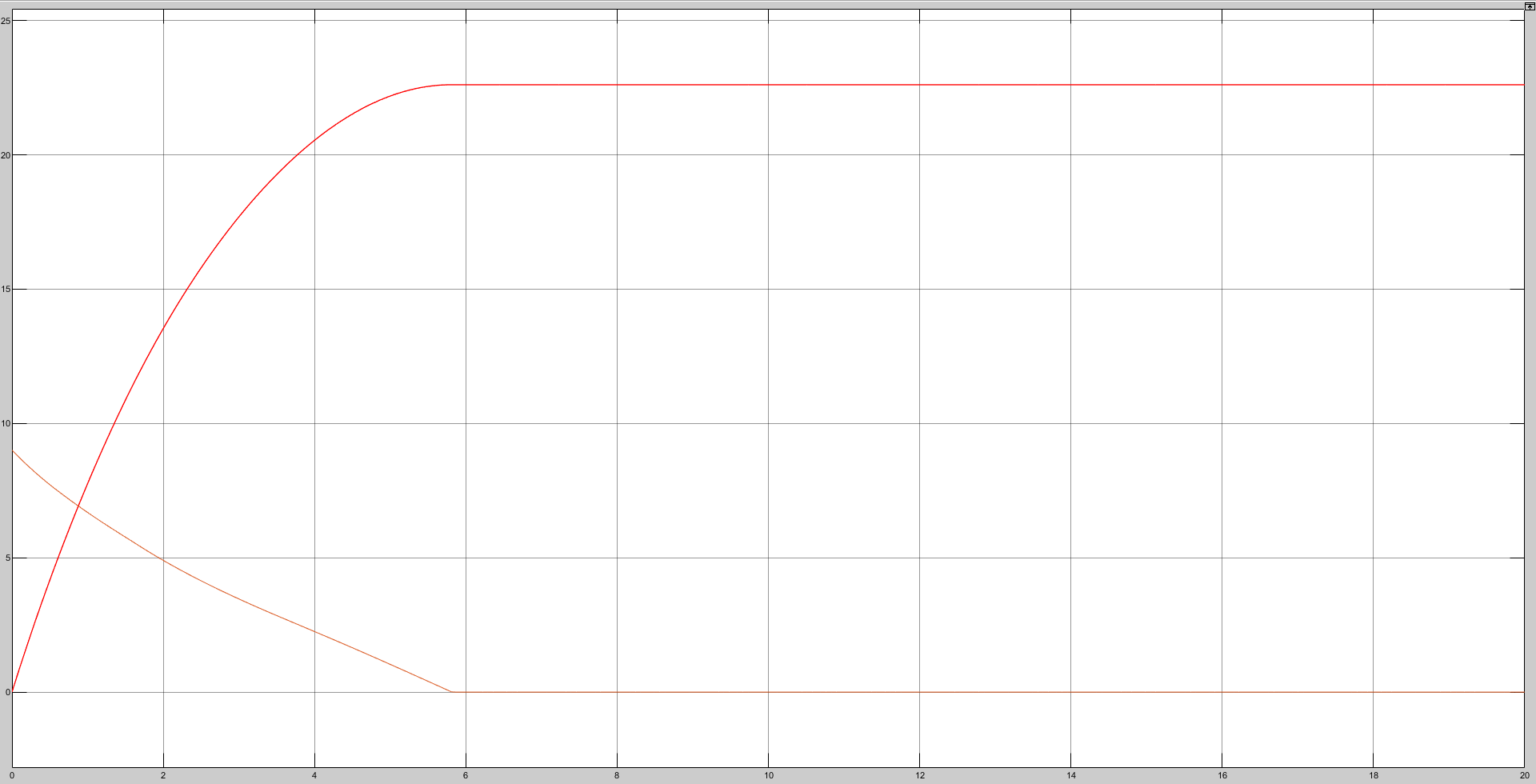
Рис. 10 – График изменения скорости и расстояния.
Вывод: В данной работе мы познакомились с возможностями Fuzzy Logic Toolbox. Построили нечёткий регулятор в FIS Editor. Данная библиотека упрощает работу с большим количеством условий и наглядно (в виде графика рабочей поверхности, регулируемых двухмерных характеристик термов) работать с ними.