

лабораторные / 4l
.docxМИНОБРНАУКИ РОССИИ
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ
ЭЛЕКТРОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
«ЛЭТИ» ИМ. В.И. УЛЬЯНОВА (ЛЕНИНА)
ОТЧЕТ по лабораторной работе №4
по дисциплине «МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ОБЪЕКТОВ И СИСТЕМ УПРАВЛЕНИЯ»
Тема: РЕАЛИЗАЦИЯ АЛГОРИТМОВ УПРАВЛЕНИЯ В СРЕДЕ MATLAB
Нуртазин И.
Попов М.М.
Преподаватель |
|
Шпекторов А.Г. |
 туденты
гр. 6408 Лукьянцов К.В.
туденты
гр. 6408 Лукьянцов К.В.
.
Санкт-Петербург
2020
Цель работы: Изучить основные принципы формирования алгоритмов управления, освоить средства моделирования систем управления в среде MATLAB.
Задача:
Синтезировать для объекта управления, который представляет собой пассажирский самолет Боинг-747, регулятор
обеспечивающий следующий спектр заданных собственных значений
Замкнуть полученным регулятором объект и проверить корни характеристического полинома.
Изменить регулятор таким образом, чтобы время переходного процесса в замкнутой системе уменьшилось и сравнить коэффициенты нового и прежнего регулятора.
Исходная математическая модель:
Задание :
Объект управления – пассажирский самолет Боинг-747, который управляется в боковом движении с помощью руля направления и элеронов: их отклонения от нейтрального положения обозначены как n и e соответственно. В вектор состояния входят следующие компоненты: vz – скорость бокового сноса; y – угловая скорость по рысканию; x – угловая скорость по крену; – угол рыскания; – угол крена; z – боковой снос. Система линейных дифференциальных уравнений, описывающих процесс стабилизации самолета в боковом движении при посадке, имеет следующий вид:

Регулятор:

Содержание работы :
Сформировать SS-объект
Общий вид :
А – Матрица состояний, В – Матрица входов, С - Матрица выхода, D – Матрица обхода.
За переменные состояний возьмем следующий порядок:

Выходами данного объекта будут следующими:

Входы данного объекта равны :

Матрицы А, В, С, D равны
Где
-
a11=-0.089;
a12=-2.19;
a13=0.328;
a14=0.319;
a15=0.0327;
a16=0.089;
b11=0.076;
b12=-0.217;
b13=-0.166;
b14=0.0264;
b15=-0.151;
b16=-0.076;
d11=-0.602;
d12=0.327;
d13=-0.975;
d14=0.227;
d15=0.0636;
d16=0.602;
i11=0.15;
f=2.21;
Общие положения
К простейшему классу задач теории модального управления относится ситуация, когда выбором коэффициентов регулятора по состоянию можно обеспечить произвольное распределение корней характеристического полинома замкнутой системы.
Вместо системы введем в рассмотрение замкнутую систему, добавляя к уравнению объекта уравнение регулятора по состоянию
![]()
где K — постоянная матрица размера m n .
Получим модель замкнутой системы в виде
В рассматриваемой задаче матрицу K необходимо выбрать таким образом, чтобы матрица A BK замкнутой системы имела заранее заданные собственные значения.
Ход работы:
1.
Задаем вектор собственных значений
Используем функцию place. Для этого используем матрицу В, включающую только первые два столбца, а также матрицу А и вектор Р .
2.
Замыкаем полученным регулятором объект с помощью функции lft с учетом операций, проведенных в предыдущей работе. Получаем систему, приведённую на рисунке.

Рис.1 Исследуемая система
Проверяем корни характеристического полинома.
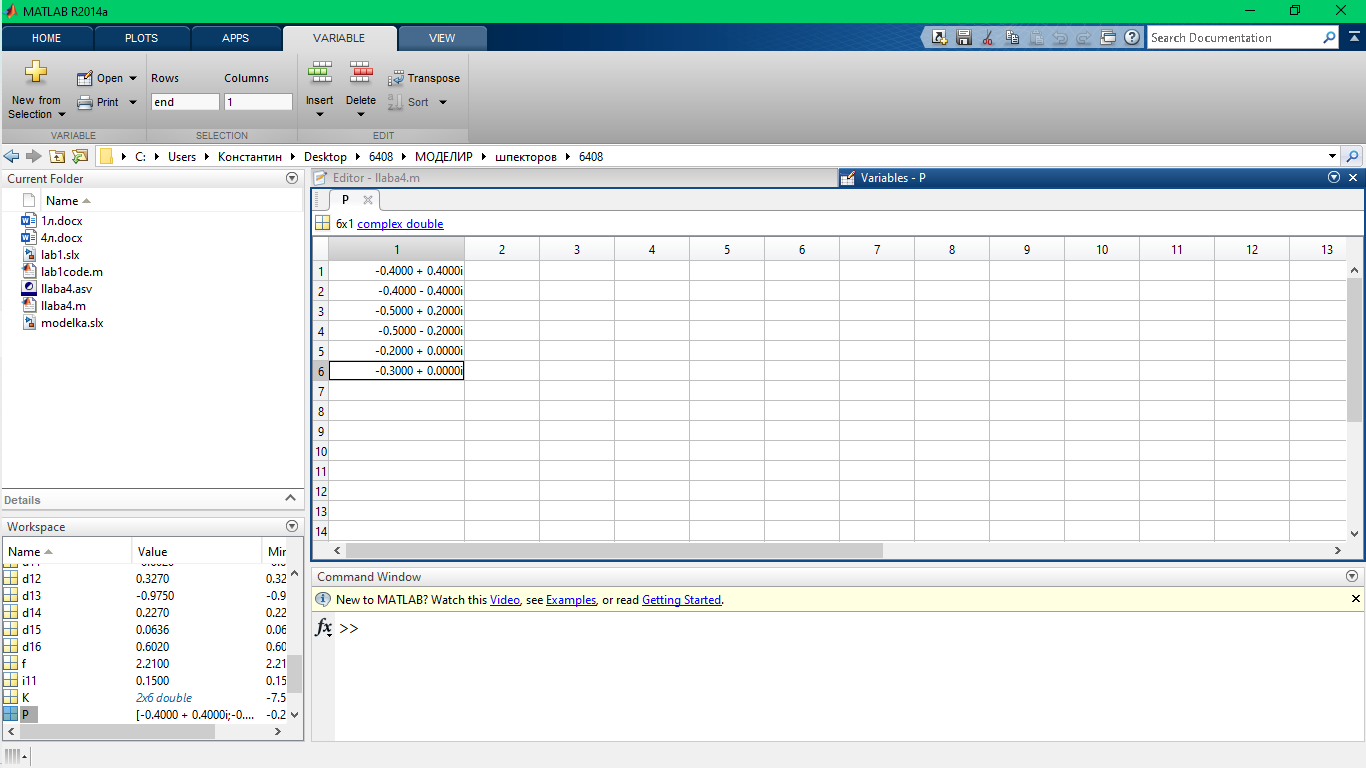
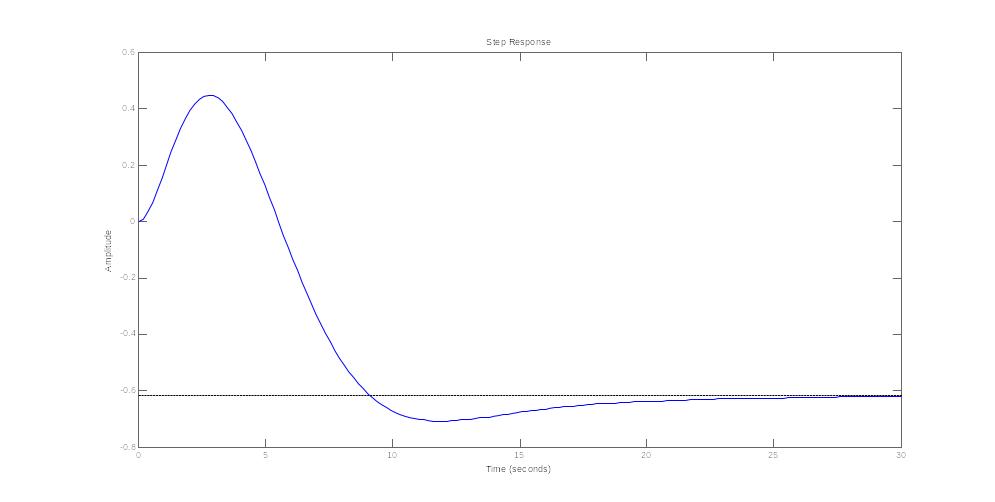
Рис.2 корни характеристического полинома и переходный процесс.
3.
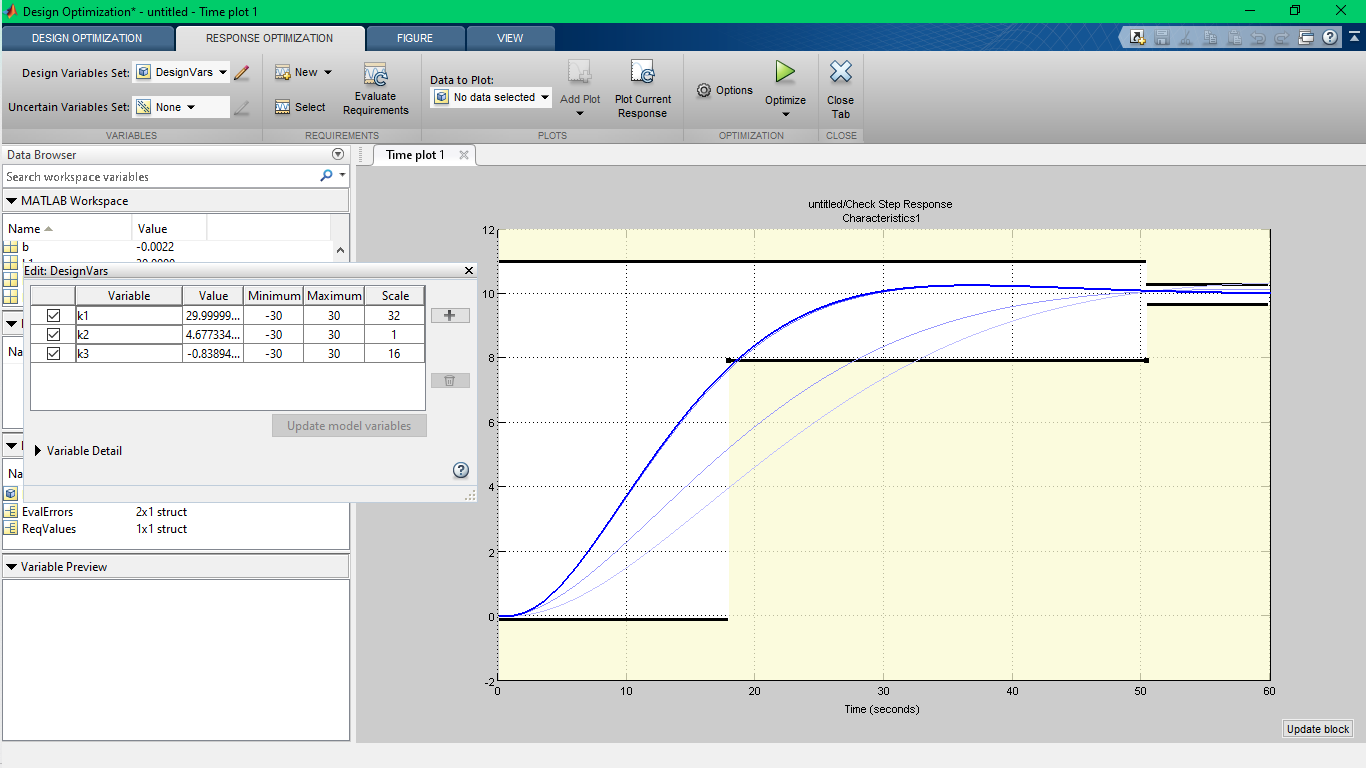
Изменяем регулятор таким образом, чтобы время переходного процесса в замкнутой системе уменьшилось и сравниваем коэффициенты нового и прежнего регулятора.
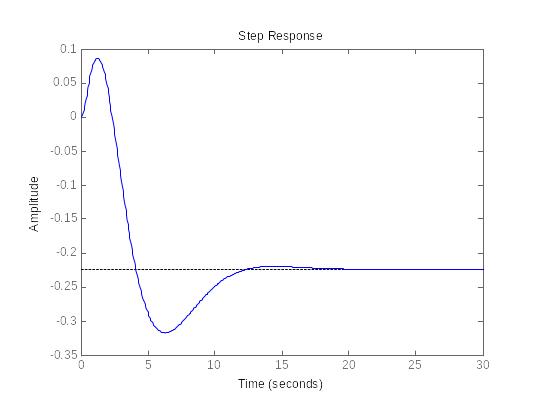
Рис.3 переходный процесс после изменения регулятора
Сравниваем коэффициенты регуляторов

Рис.4 Коэффициенты до изменения.
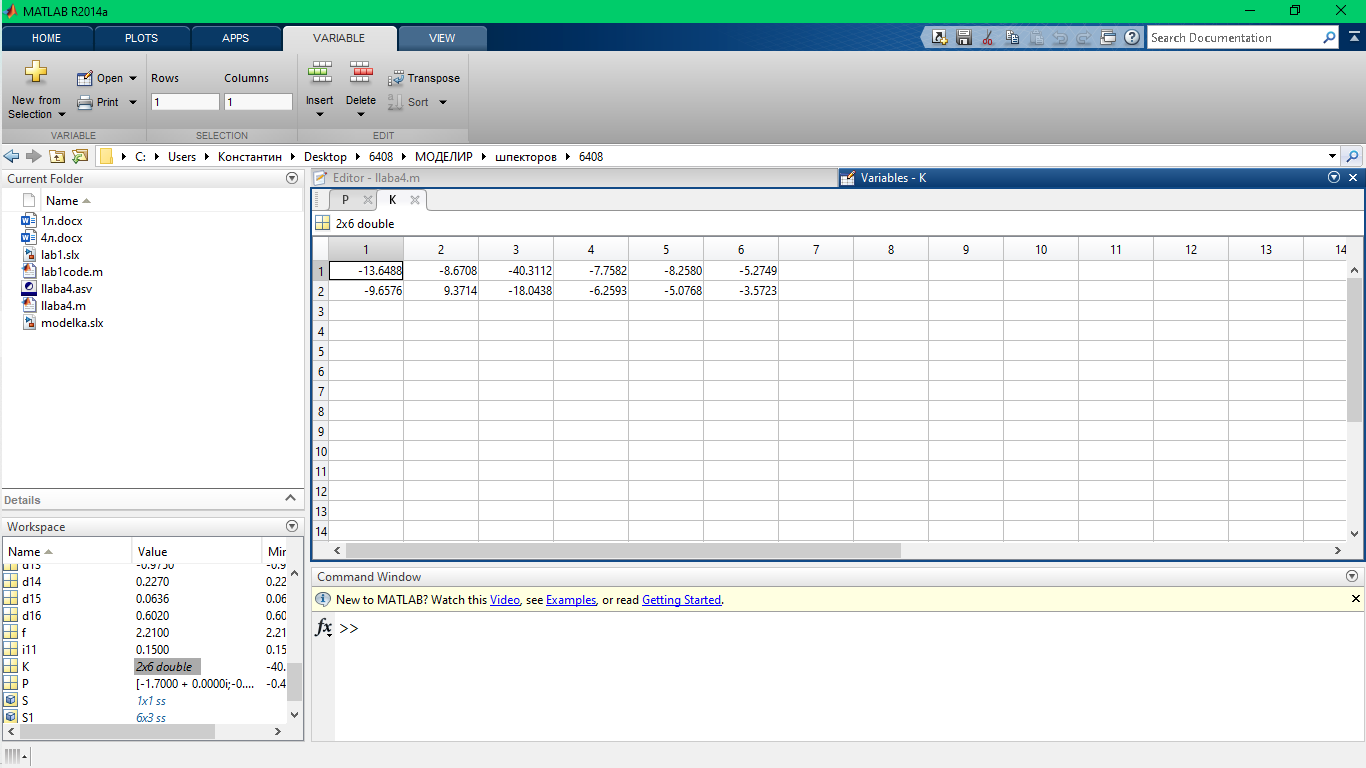
Рис.5 Коэффициенты после изменения.
Выводы: В ходе выполнения работы научились решать задачу теории модального управления простейшего класса. А именно получили желаемое распределение корней характеристического полинома замкнутой системы, путем изменения коэффициентов регулятора.
Скрипт:
clear,clc;
a11=-0.089;
a12=-2.19;
a13=0.328;
a14=0.319;
a15=0.0327;
a16=0.089;
b11=0.076;
b12=-0.217;
b13=-0.166;
b14=0.0264;
b15=-0.151;
b16=-0.076;
d11=-0.602;
d12=0.327;
d13=-0.975;
d14=0.227;
d15=0.0636;
d16=0.602;
i11=0.15;
f=2.21;
A=[a11, a12, 0, a13, a14, 0; b11, b12, 0, b13, 0, 0; 0, 1, 0, 0, 0, 0;...
d11, d12, 0, d13, 0, 0; 0, i11, 0, 1, 0, 0; 1, 0, f, 0, 0, 0];
B=[0, a15, a16; b14, b15, b16; 0, 0, 0; d14, d15, d16; 0, 0, 0; 0, 0, 0];
C=eye(6);
D=[0, 0, 0;0, 0, 0;0, 0, 0;0, 0, 0;0, 0, 0;0, 0, 0];
S1=ss(A,B,C,D);
P1=[-0.2;-0.3; -0.5-0.2j;-0.5+0.2j;-0.4-0.4j;-0.4+0.4j];
P2=[-1.7; -0.9; -1-0.2j; -1+0.2j; -0.4-0.4j; -0.4+0.4j];
B1=[B(:,1),B(:,2)];
K1=-place(A,B1,P1);
K2=-place(A,B1,P2);
set(S1,'B',[B(:,3),B(:,1),B(:,2)]);
S2=ss(K1);
S3=ss(K2);
S11=lft(S1,S2,2,6);
S22=lft(S1,S3,2,6);
set(S11,'C', [0, 0, 0, 0, 1, 0], 'D',[0]);
set(S22,'C', [0, 0, 0, 0, 1, 0], 'D',[0]);
P = pole(S22);
pzplot(tf(S22))
grid on
figure(1);
step(S11,30);
figure(2)
step(S22,30)
figure(3);
step(S11,30);
hold on
step(S22,30)
Практическая работа №3
Решить задачу параметрического синтеза для математической модели
подводного аппарата
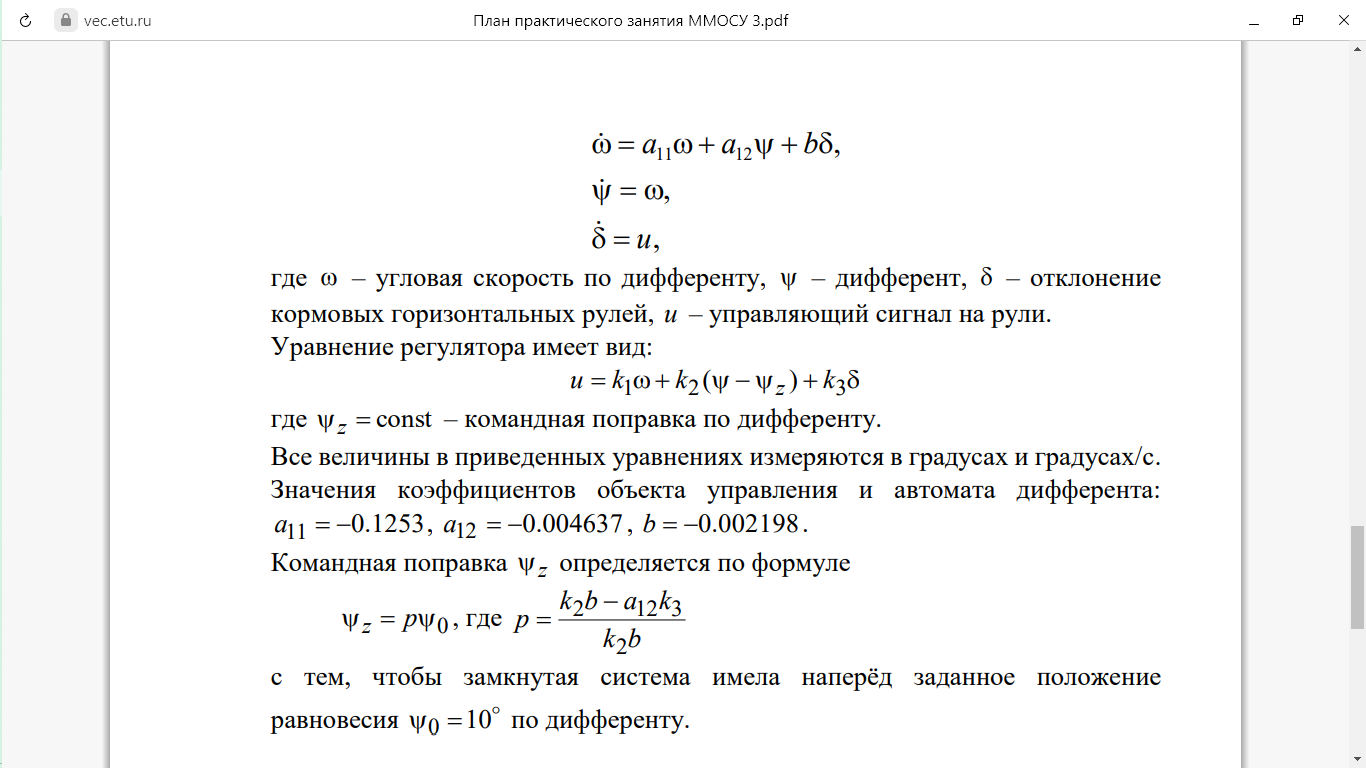
где
ω – угловая скорость по дифференту,
ψ – дифферент,
δ – отклонение кормовых горизонтальных рулей,
u – управляющий сигнал на рули.
Уравнение регулятора имеет вид:
где
ψz = const – командная поправка по дифференту.
Все величины в приведенных уравнениях измеряются в градусах и градусах/с.
Значения коэффициентов объекта управления и автомата дифферента:
a11 = 0.1253, a12 = 0.004637 , b = 0.002198.
Командная поправка ψz определяется по формуле
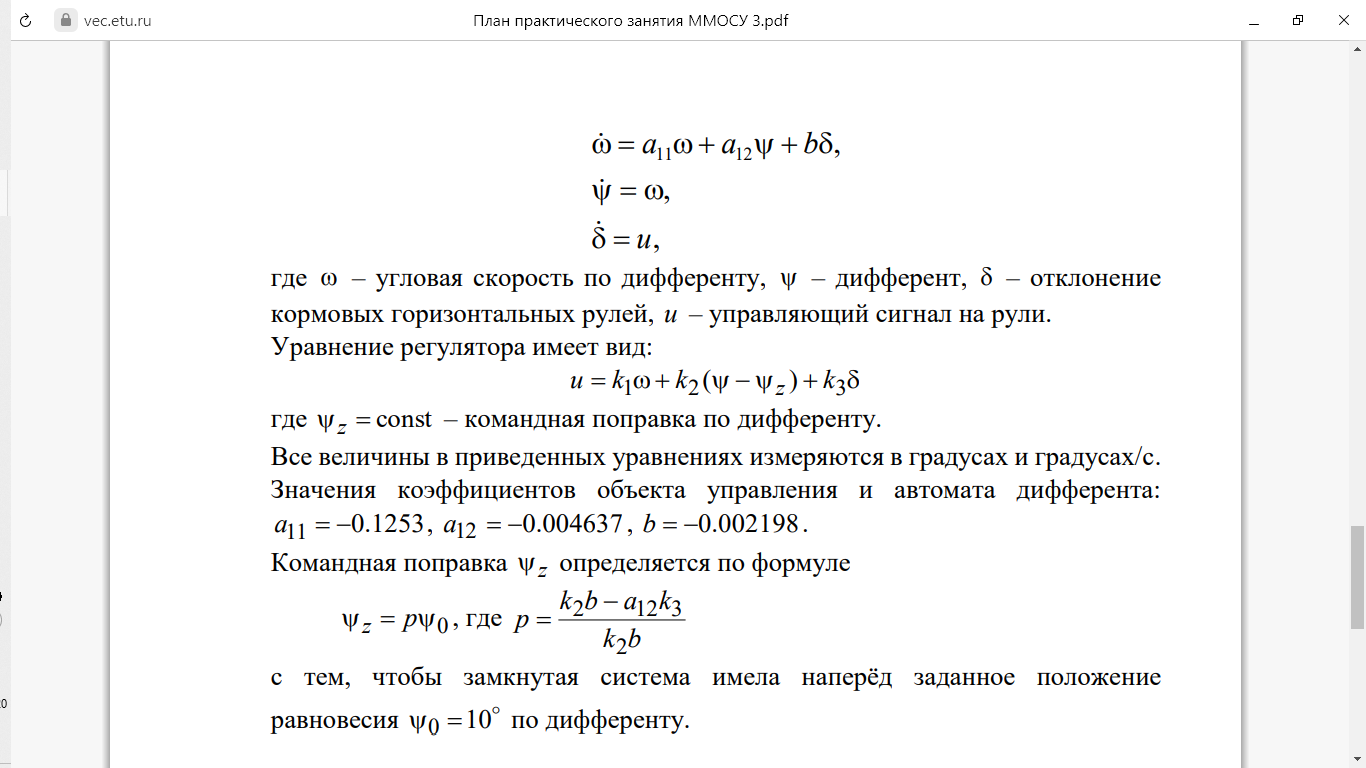
с тем, чтобы замкнутая система имела наперёд заданное положение
равновесия по дифференту.
Скрипт:
clear,clc
a11=-0.1253;
a12=-0.004637;
b=-0.002198;
k1=-20;
k2=-1;
k3=-10;
Модель:
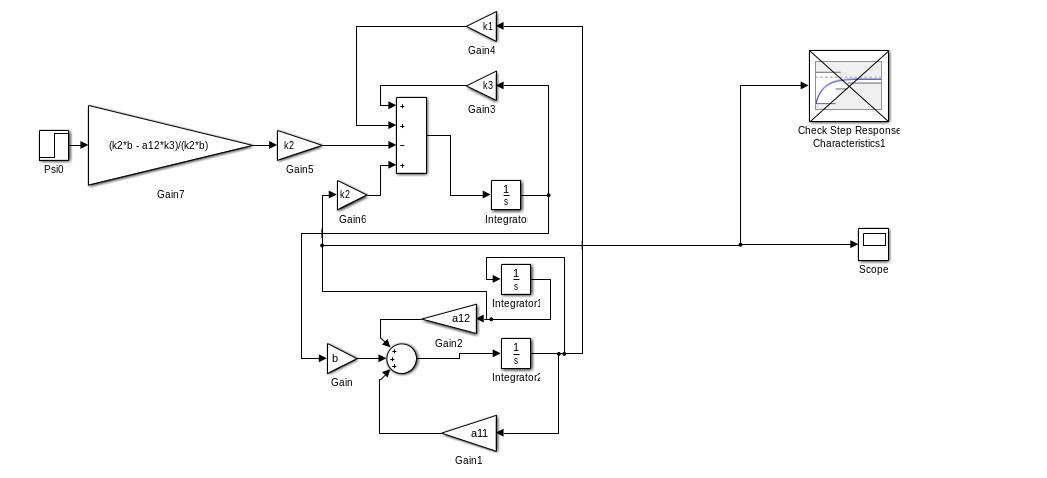
Результат:
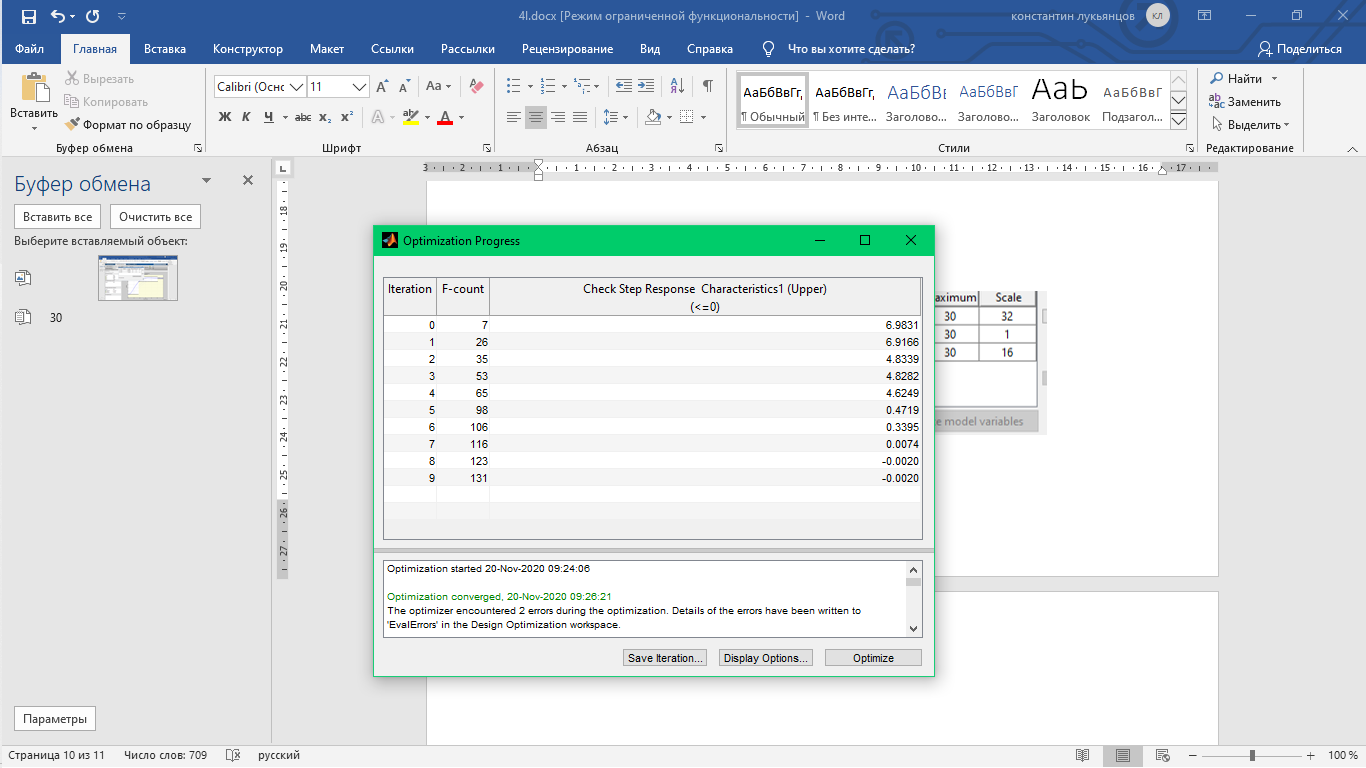
Полученные в процессе работы коэффициенты: