

Лабораторные / ДГМ_2_20в_6408_НуртазинИ
.docxМИНистерство науки и высшего образования РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
отчёт
по практической работе №2
по дисциплине «Дополнительные главы математики»
Тема: Разработка стохастической оптимальной системы управления двухмассовым
упругим объектом
Вариант 24
Студент гр. 6408 |
|
Нуртазин И. |
|
|
|
Преподаватель |
Туркин Д. Н. |
Санкт-Петербург
2021
Цель работы: разработка линейных оптимальных стохастических систем управления.
Содержание:
Разрабатывается оптимальная система управления двухмассовым электромеханическим объектом, математическое описание которого в виде нормированной структурной схемы представлено на рис. 1 на выходную переменную объекта, как показано на схеме действует момент статических сопротивлений Mc. Его изменение соответствует экспоненциальному случайному процессу, имеющему характеристику спектральной плотности вида
![]() .
.

Рис.1.
Следовательно, такой процесс может быть сформирован на выходе линейной системы первого порядка, возбуждаемой белым шумом wη , интенсивности vη , которая описывается как
![]()
Единственной переменной, доступной измерению, является скорость вращения двигателя, причем в измерениях, реализуемых с помощью тахогенератора, присутствует помеха, аддитивно наложенная на полезный сигнал. Сигнал помехи является случайной величиной и может быть сформирован на выходе линейной системы, возбуждаемой белым шумом ωμ с интенсивностью νμ т.е
![]()
Для
заданного объекта требуется разработать
систему управления, оптимальную с точки
зрения минимизации критерия![]() ,
а, следовательно, необходимо спроектировать
оптимальное наблюдающее устройство и
оптимальный регулятор.
,
а, следовательно, необходимо спроектировать
оптимальное наблюдающее устройство и
оптимальный регулятор.
Табл 1. Параметры варианта
Вариант№ |
Параметры объекта управления |
||||||||
ρяц |
Тяц |
Tm1 |
Tc |
Tm2 |
Tη |
Tμ |
|
|
|
20 |
0,26 |
0,037 |
2,25 |
6,6 |
0,26 |
10 |
3,4 |
6,8·10-3 |
0.210·10-8 |


Структурная схема оптимальной системы управления рассматриваемым объектом приведена ниже на рисунке 2.

Рис.2. Структурная схема оптимальной системы управления
Расчет коэффициентов регулятора выполняется с помощью специальных функций в среде MATLAB. Ниже будет представлены основные этапы выполнения работы, а так же код программы.
Основное представление системы выполняется на описании
![]() ,
,
где Х – n мерный вектор состояний системы, u – м мерный вектор управления (входов), матрица А – размером n x n, B – m x n, D – l x n , G – матрица возмущений действующих на переменные вектора входных переменных размером 1 x n, wη – белый шум. где n - размерность системы, l – колличество выходов, u колличество входов, n>l.
Ниже представлены матрицы А, B, G, D.
 =
=


Поскольку в минимизируемом функционале качества два весовых коэффициента ρ1 и ρ2, для определения однозначного решения необходимо предварительно выполнить несколько вариантов расчета параметров регулятора, приняв ρ 1=1 и варьируя ρ 2 в широких пределах, например: ρ2=0.1; 0.05; 0.025; 0.01. Выбор диапазона и степени дискретизации для весового коэффициента ρ2 выполняется на начальном этапе разработки оптимального регулятора произвольно. В дальнейшем может потребоваться корректировка выбранных значений. Рассчитав коэффициенты оптимального регулятора, соответствующие всем выбранным значениям ρ 2, из полученного набора оптимальных решений необходимо выбрать единственное, которое будет приемлемым при практической реализации, следовательно, в первую очередь, по энергетическим возможностям объекта управления. Делается это из следующих соображений. Если стремиться к оптимальной системе, в которой бы мгновенные значения тока якоря двигателя не превышали 1,6 номинального значения, следует выбрать такое значение ρ 2, чтобы в системе, замкнутой через соответствующую этому ρ 2 строку оптимальных коэффициентов K = [ k1 k2 k3 k4 k5] , при отработке MC (t) выполнялось неравенство
σi < 0.53 или Di < 0.28
где σi - среднее квадратическое значение тока или его стандарт; Di - дисперсия тока. По началу примем ρ2=0.025, далее составим таблицу для всего ряда ρ2, и выберем наиболее подходящее.
Синтез оптимального регулятора в MATLAB осуществляется с помощью функции lqr(A,B,Q,R).
По условию задачи измерению доступна только скорость вращения двигателя, поэтому замыкание обратных связей системы следует производить через наблюдающее устройство. Для определения коэффициентов наблюдателя может быть использована функция kalman(P,Qn,Rn), P - ss модель, Qn - интенсивность шума на входе Rn - интенсивность шума, действующего на измеряемую переменную.
Функция [kest,L]= kalman(P, Qn, Rn) вернет модель фильтра Калмана, и так же матрицу коэффициентов наблюдателя L. Для описания Pss модели потребуются дополнительные матрицы: C’D, H.

Матрицы D и H:
D=[0]
H=[0]
Получив таким образом коэффициенты оптимального регулятора и коэффициенты фильтра Калмана, на их основе надо сформировать ЛКГ-регулятор с помощью функции F=lqgreg(kest,K).
Для получения системы стабилизации скорости, состоящей из объекта управления, наблюдающего устройства и оптимального регулятора, необходимо замкнуть заданный объект управления через полученный ЛКГ-регулятор.
Для начала необходимо создать ss-модель объекта в виде:
sys=ss(A,B,C1,D).
Затем следует выполнить функцию clsys=feedback(sys,F,+1), которая возвращает модель замкнутой системы clsys и определяет положительную обратную связь (параметр “+1”):
Следующим
этапом необходимо решить уравнения
Ляпунова
![]() ,
. Для
решении уравнения Ляпунова в MATLAB
используется функция
,
. Для
решении уравнения Ляпунова в MATLAB
используется функция
X=lyap(Az,Vz)
Матрица Az находится с помощью функции [Az]=ssdata(clsys). Матрица Vz определяется как Vz=Gz*V*Gzt. Где V матрица определитель, Gz=[G,0;0,L*1/Tμ], Gzt – транспонированная матрица Gz.
V=
[ ].
].
Рассчитав необходимые матрицы Vz и Az с помощью функции lyap найдем матрицу X. (X=lyap(Az,Vz)).
Первые пять диагональных элементов полученной матрицы являются дисперсиями переменных вектора состояния. Далее представлены значения дисперсий переменных вектора состояния для всех ρ2
Дисперсия переменных |
ρ2=0,05 |
ρ2=0,025 |
ρ2=0,01 |
ρ2=0,005 |
ρ2=0,0025 |
Dx1 |
0.0442 |
0,0715 |
0,1286 |
0,1933 |
0.2819 |
Dx2 |
0,0029 |
0,0039 |
0,0054 |
0,0068 |
0.0084 |
Dx3 |
4,046e-04 |
4,046e-04 |
4,049е-04 |
4,05е-04 |
4.0485e-04 |
Dx4 |
9,858e-04 |
8,146e-04 |
6,389e-04 |
5,358е-04 |
4.5222e-04 |
При ρ2=0.0025 значение дисперсии превышает условие (Di < 0.28). Возьмём пороговое значение в ρ2=0.003. В таблице ниже будут представлены значения дисперсии для ρ2=0.003.
Дисперсия переменных |
ρ2=0,003 |
Dx1 |
0.0256 |
Dx2 |
0.008 |
Dx3 |
4.0493e-04 |
Dx4 |
4.7255e-04 |
Состовляем структурную модель в Simulink.

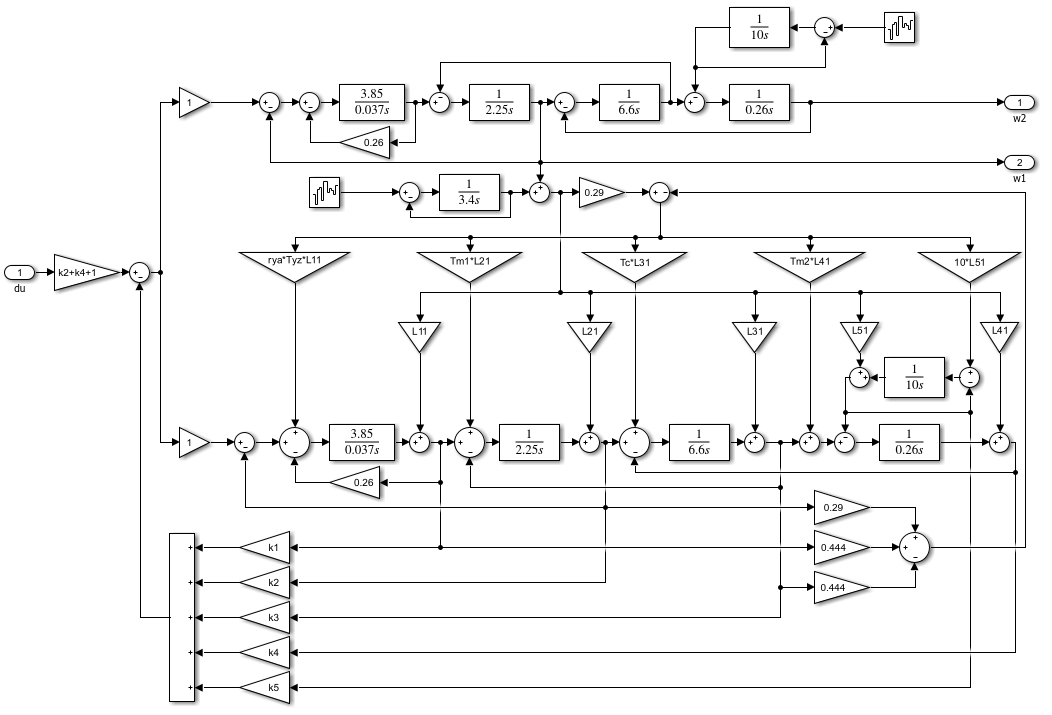
Рис.3. Структурная схема с подсистемой
Из исходных материалов я воспользовался функцией set_par, которая записывала коэффициенты K и L.
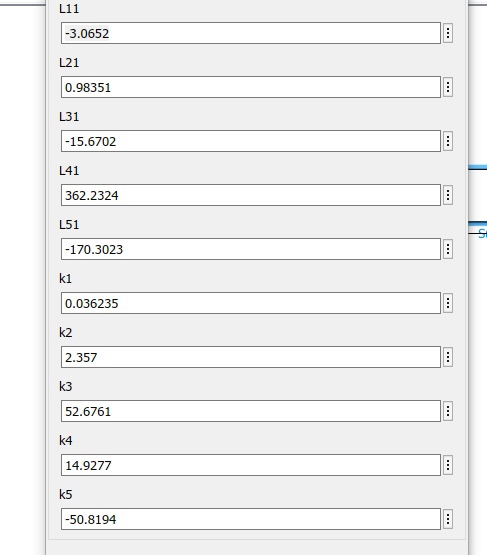
Рис.4. Параметры подсистемы
На осциллографе изображена реакция системы на скачкообразное изменение управляющего воздействия.

Рис.5. Переходные процессы.
Черный – реакция объекта с регулятором; синий – реакция объекта без регулятора; оранжевый – единичное ступенчатое воздействие.
Выводы:
По итогам работы была разработана оптимальная система управления двухмассовым электромеханическим объектом, расчет параметров системы был выполнен в среде MATLAB, а с помощью пакета Simulink получена схема объекта и регулятора, с помощью которой удалось симулировать процесс и построить графики переходного процесса.
Корректировка регулятора влияет на быстродействие системы, уменьшает амплитуду колебаний и время реакции. Как итог - электропривод уменьшает износ, и легче переносит посторонние воздействия.
Код программы:
clear,clc,
format long;
rya=0.26;
Tyz=0.037;
Tm1=2.25;
Tc=6.6;
Tm2=0.26;
Tn=10;
Tmy=3.4;
Myn=6.8*10^(-3);
Mmy=0.210*10^(-8);
Gm=[1/Tmy];
A=[-1/Tyz,-1/(rya*Tyz),0,0,0;1/Tm1,0,-1/Tm1,0,0;0,1/Tc,0,-1/Tc,0;0,0,1/Tm2,...
0,-1/Tm2;0,0,0,0,-1/Tn];
B=[1/(rya*Tyz);0;0;0;0];
G=[0;0;0;0;1/Tn];
D=[0];
H=[0];
Q=[0,0,0,0,0;0,0,0,0,0;0,0,0,0,0;0,0,0,1,0;0,0,0,0,0];
R=[0.025];
K=lqr(A,B,Q,R);
C1=[1/Tm1,1/Tmy,-1/Tm1,0,0];
P=ss(A,[B G],C1,[D H]);
[kest,L]=kalman(P,Myn,Mmy);
F=lqgreg(kest,K);
sys=ss(A,B,C1,D);
clsys=feedback(sys,F,+1);
Gzt={-G' [0, 0, 0, 0, 0];[0, 0, 0, 0, 0] -(Gm*L)'};
Gzt=cell2mat(Gzt);
Gz=Gzt';
V=[Myn,0;0,Mmy]
Vz=Gz*V*Gzt;
Az=ssdata(clsys);
X=lyap(Az,Vz);
L=[L;K'];
set_par(L)
Функция set_par
function rez=set_par(x);
set_param('Lab2/Subsystem','L11',num2str(x(1)),'L21',num2str(x(2)),'L31',num2str(x(3)),'L41',num2str(x(4)),'L51',num2str(x(5)));
set_param('Lab2/Subsystem','k1',num2str(x(6)),'k2',num2str(x(7)),'k3',num2str(x(8)),'k4',num2str(x(9)),'k5',num2str(x(10)));
sim ('Lab2');