

Лабораторные / ДГМ_3_20в_6408_НуртазинИ
.docx
МИНистерство науки и высшего образования РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
отчёт
по практической работе №3
по дисциплине «Дополнительные главы математики»
Тема: Параметрическая оптимизация системы управления электромеханическим объектом со случайным возмущением
Вариант 20
Студент гр. 6408 |
|
Нуртазин И. |
|
|
|
Преподаватель |
Туркин Д. Н. |
Санкт-Петербург
2021
Цель работы:
Получение практических навыков решения задачи параметрической оптимизации систем управления электромеханическими объектами со случайными возмущениями.
Основные теоретические положения:
Рассматривается
следящая система двухмассового упругого
электромеханического объекта, на который
действует случайное возмущающее
воздействие
 с
характеристикой спектральной плотности
вида
с
характеристикой спектральной плотности
вида
 .
Управляющим
является эквивалентное синусоидальное
воздействие вида
.
Управляющим
является эквивалентное синусоидальное
воздействие вида
 .
Ошибка
слежения в этом случае представляет
собой случайный процесс, поэтому при
проектировании таких систем стремятся
обеспечить минимум средней квадратической
ошибки наведения в процессе функционирования,
то есть:
.
Ошибка
слежения в этом случае представляет
собой случайный процесс, поэтому при
проектировании таких систем стремятся
обеспечить минимум средней квадратической
ошибки наведения в процессе функционирования,
то есть:
 ,
,
где
 –
функционал
качества работы системы;
–
функционал
качества работы системы;
 –
оценка дисперсии ошибки слежения.
–
оценка дисперсии ошибки слежения.
Однако,
если в качестве критерия качества работы
системы принимается минимум
,
это всегда приводит к такому подбору
параметров системы, при которых она
будет находиться на границе устойчивости,
что практически неприемлемо. Поэтому
при решении такой задачи функционал
качества следует формировать в виде
 .
.
Следящая система состоит из двух контуров регулирвоания: контура скорости и контура положения. Считается, что быстродействие внутреннего токового контура настолько велико, что его динамическими характеристиками можно пренебречь. Кроме того, можно принебречь и влиянием обратной связи по тротиво-эдс на работу токогово контура.
Структурная схема поиска функционала приведена на рисунке 1.
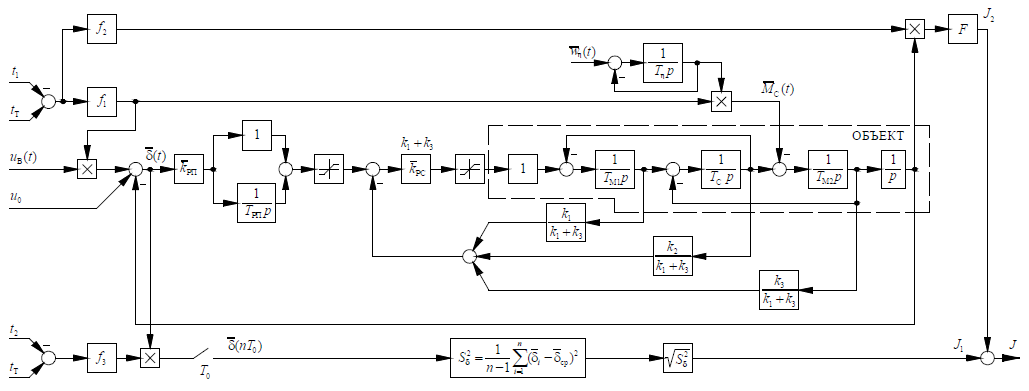
Рисунок 1 – Структурная схема поиска функционала J
Скоростная
подсистема выполняется по принципам
модальног управления. В соотвествии с
этим в работе необходимо определить
значения коэффициентов модального
регулятора
 .
.
Контур
положения настраивается за счет выбора
параметров
 и
и
 пропорционально-интегрального
регулятора.
пропорционально-интегрального
регулятора.
В работе требуется определить такие значения параметров ПИ-регулятора положения и , которые обеспечат минимум функционалу .
Численные значения параметров параметров, характеризующих объект управления для варината 20 приведены в табилице 1.
Таблица 1 – Численные значения параметров
Вариант № |
Параметры объекта управления |
||||
|
|
|
|
|
|
20 |
2.25 |
6.6 |
0.25 |
100 |
|






Ход работы:
Структурная схема оптимальной системы управления объектом приведена на рисунке 2.

Рисунок 2 – Структурная схема оптимальной системы
В представленной структурной схеме содержаться следующие подсистемы:
Subsystem – передаточная функция регулятора (рисунок 3);
Subsystem 1 – передаточная функция неизменяемой части системы (рисунок 4);
Subsystem 2 – вычисление
 (рисунок
5);
(рисунок
5);
Subsystem 3 – фильтр для формирования требуемой спектральной характеристики возмущающего воздействия (рисунок 6);
Subsystem 4 – расчет второго слагаемого функционала качества (рисунок 7);
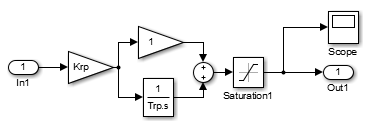
Рисунок 3 – Subsystem

Рисунок 4 – Subsystem 1
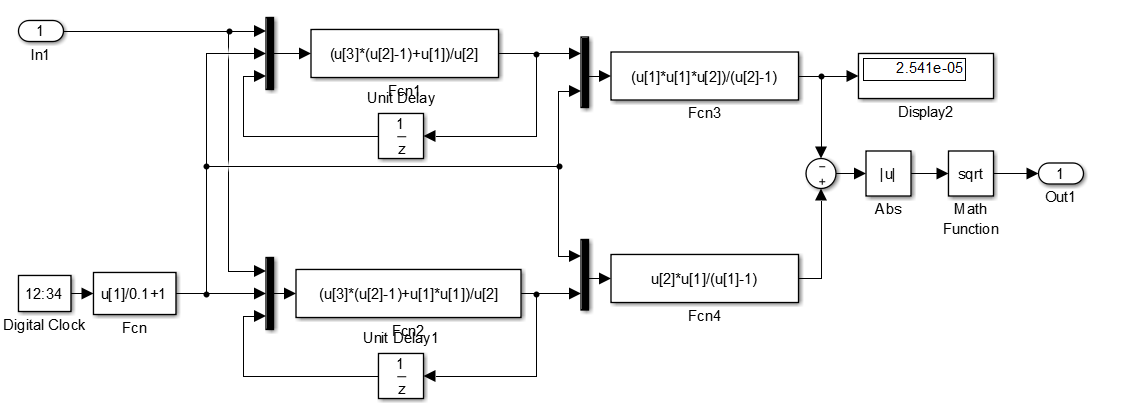
Рисунок 5 – Subsystem 2
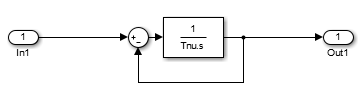
Рисунок 6 – Subsystem 3
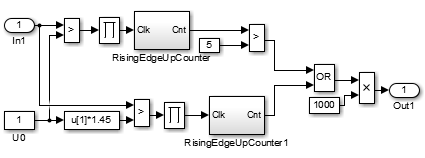
Рисунок 7 – Subsystem 4
Для определение коэффициентов выполним следующие операции:
Определение матриц A и B

Определение коэффициентов регулятора:
Характеристический полином:
 ,
,
где
 –
параметр,
характеризующий, возникновение колебаний
в системе.
–
параметр,
характеризующий, возникновение колебаний
в системе.
Для
возврата строки коэффициентов модального
регулятора воспользуемся функцией
 ,
где
,
где
 –
строка корней характеристического
полинома.
–
строка корней характеристического
полинома.
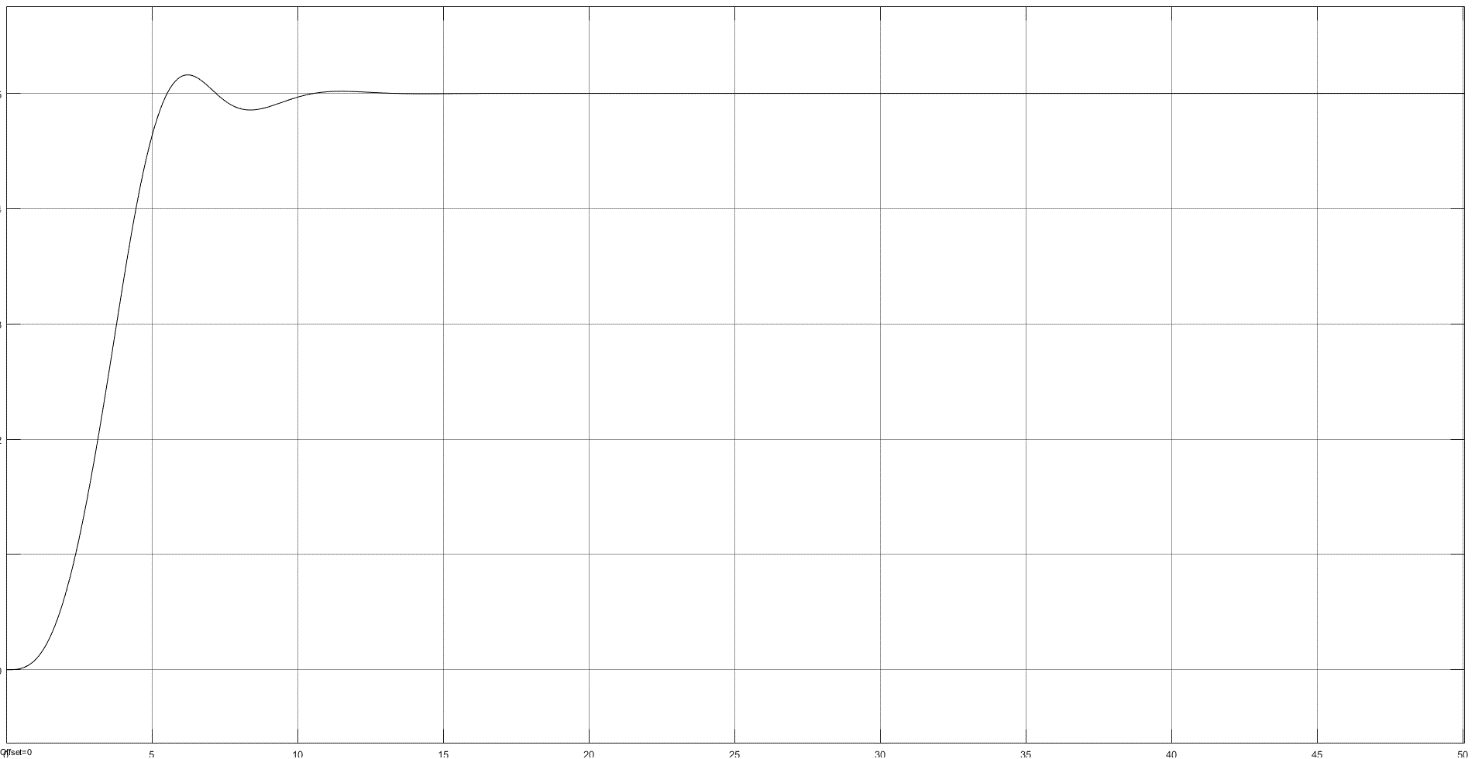
Определим методом подбора, таким образом, чтобы ограничение соответствующих переменных не приводило бы к возникновению колебаний в системе. Для определения качества подбора обратимся к подсистеме Subsystem 1 и произведем оценку осциллограмм (рисунок 8 – 11).

Рис.
8 – Осциллограмма при

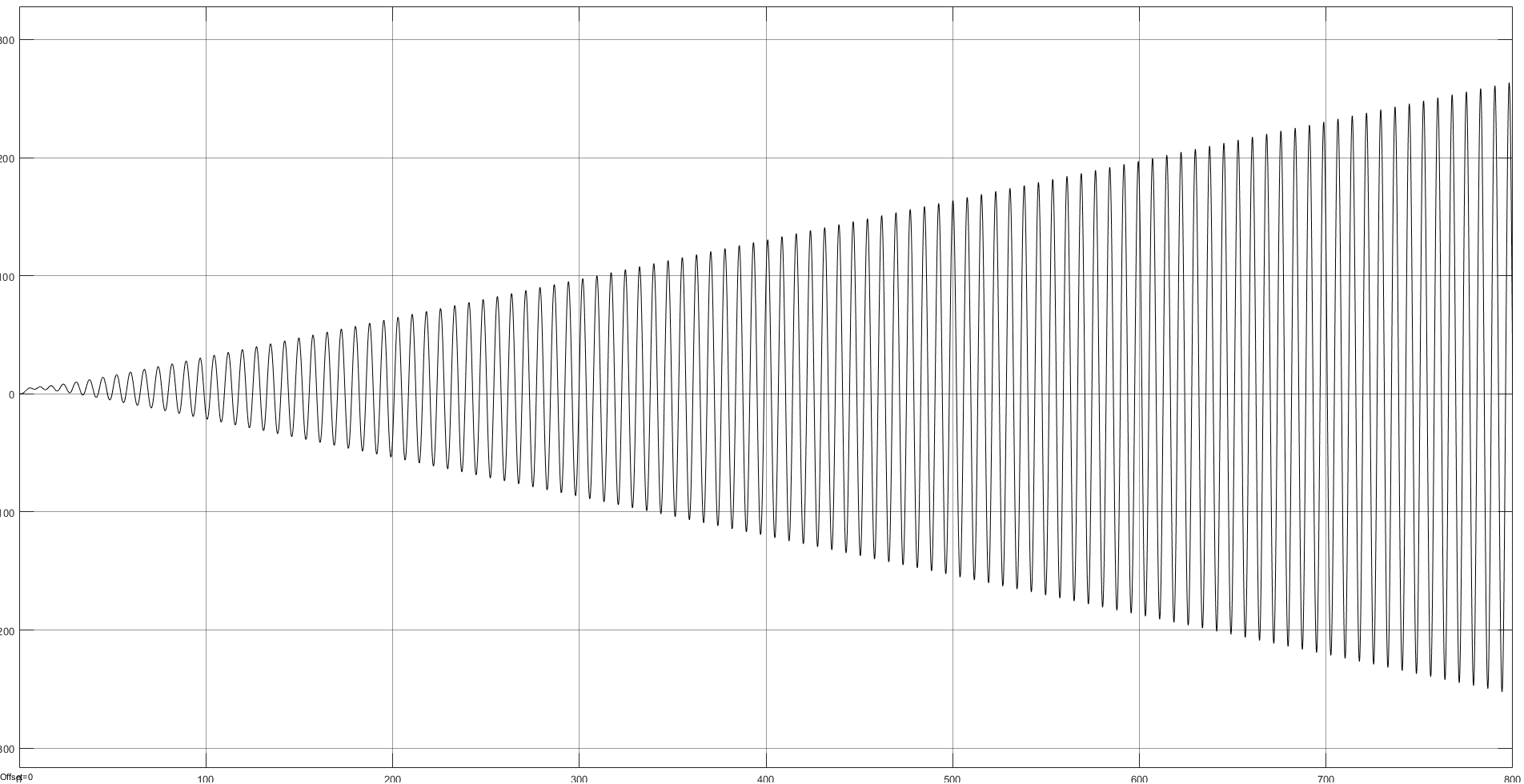
Рис.
9
– Осциллограмма при

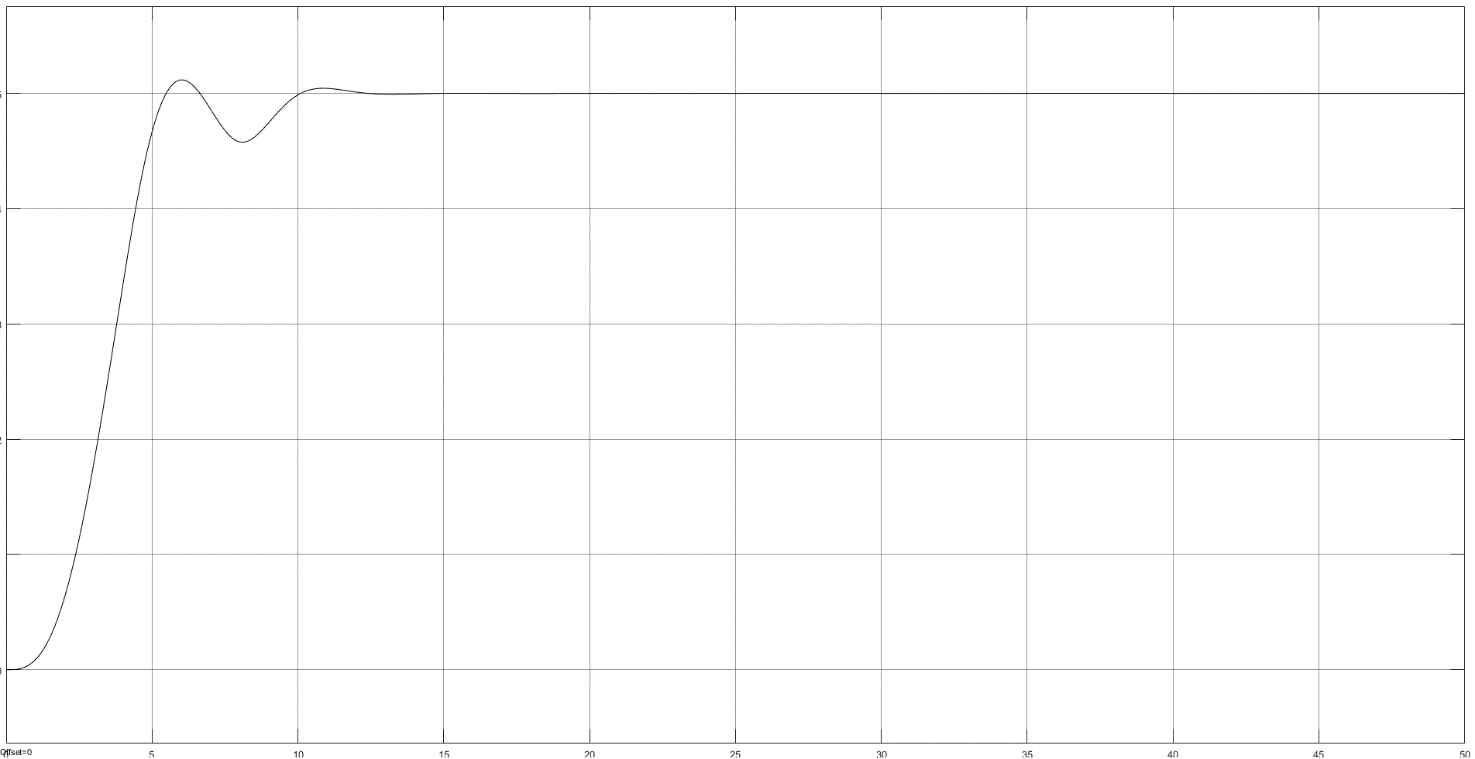
Рис.
10
– Осциллограмма при

Рисунок
11 – Осциллограмма при

Выбираем
значение
 ,
на мой взгляд оно является оптимальным
(наименьшее время перерегулирования,
наименьшая колебательность). В дальнейших
расчётах принимаем
,
на мой взгляд оно является оптимальным
(наименьшее время перерегулирования,
наименьшая колебательность). В дальнейших
расчётах принимаем
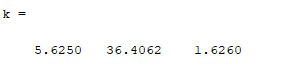
Коэффициенты
регулятора:
Поиск коэффициентов и методом ЛАФЧХ представлен на рисунке 12.
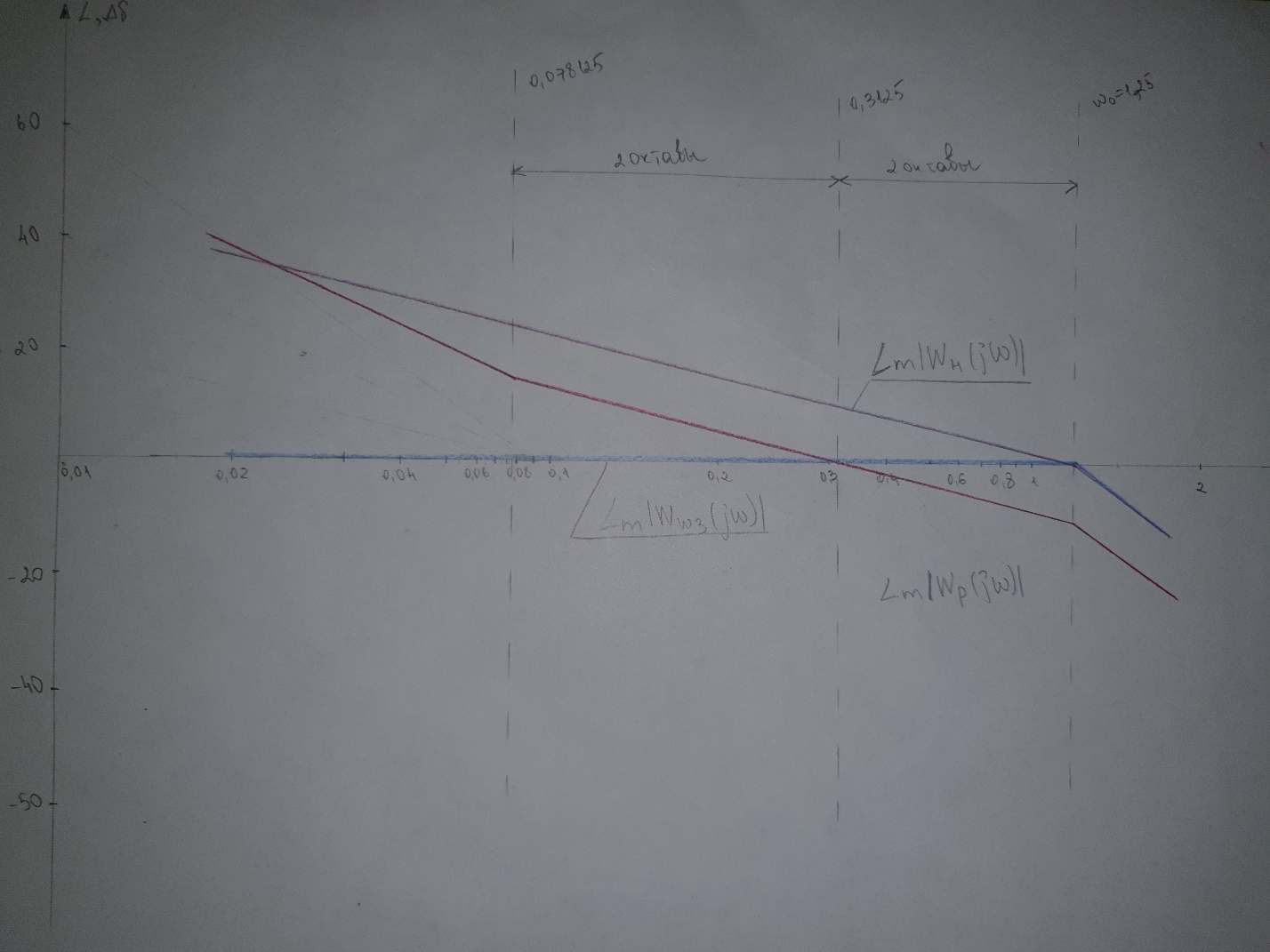
Рис. 12 – Поиск коэффициентов и
Согласно построенным характеристикам определяем коэффициенты и :
 ;
;
Далее, воспользуемся методом деформированного многогранника для минимизации функционала J.
x = minsearch(fun, x0,△x,wait, [options]),
где х – l-мерный вектор, fun – функция, которая принимает вектор x и возвращает скаляр f, х0 – вектор начальных значений варьируемых параметров, △x – вектор шагов варьирования параметров, wait – если 1 – то переход на следующую итерацию осуществляется по усмотрению пользователя, если 0 – то оптимизация происходит автоматически, options – параметры оптимизационных опций.
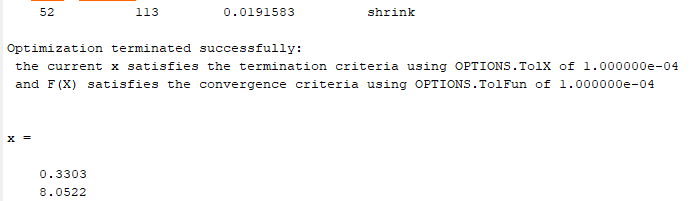
Рис. 13 – Результаты оптимизации
Выполнение поиска минимума функционала J привело к следующим результатам (таблица 2):
Таблица 2 – Результаты оптимизации
Состояние процесса |
Значения коэффициентов регулятора положения |
Значение функционала качества J |
До оптимизации |
;
|
J=0,021823 |
После оптимизации |
|
J=0,0191583 |

 ;
;
Оптимальное значение достигнуто на 52 итерации.
Выводы:
В ходе данной практической работы было получено минимальное значение средней квадратичной ошибки наведения. Были найдены коэффициенты и методом ЛАФЧХ. В ходе работы были получены их оптимальные значения с помощью метода деформированного многогранника.
Значение исходного функционала с помощью функции minsearch уменьшилось на 0,0026647.