

ТКЛ_3
.pdfМІНІСТЕРСТВО ТРАНСПОРТУ ТА ЗВ’ЯЗКУ УКРАЇНИ
Дніпропетровський національний університет залізничного транспорту імені академіка В. Лазаряна
Кафедра «Локомотиви»
ТЕОРІЯ ТА КОНСТРУКЦІЯ ЛОКОМОТИВІВ
Методичні вказівки до курсового проектування. Розділ «Динамічне вписування тепловоза в криву»
Укладачі: Д. В. Бобирь, Є. Г. Нєчаєв,
Я.В. Болжеларський
Для студентів спеціальності 7.100501 «Рухомий склад та спеціальна техніка залізничного транспорту» спеціалізації «Виробництво, експлуатація та ремонт локомотивів» заочної форми навчання
Дніпропетровськ 2009
УДК 629. 42.01 (075.8)
Укладачі
Д. В. Бобирь, Є. Г. Нєчаєв
Рецензенти:
головний інженер служби приміских пасажирських перевезень В. С. Любка (Придніпровська залізнця),
канд. техн. наук, доц. В. М. Ляшук (ДІІТ)
Теорія та конструкція локомотивів: Методичні вказівки до курсового проектування. Розділ «Динамічне вписування тепловоза в криву» /Днiпропетр. націон. унiвер. залiзнич. трансп. ім. ак. В. Лазаряна; Уклад.: Д. В. Бобирь, Є. Г. Нєчаєв, Я.В. Болжеларський. – Дніпропетровськ, 2009. – 22 с.
Методичні вказівки містять методику виконання розрахунку і побудови тягової та те- хніко-економічних характеристик тепловоза.
Iл. 8. Табл. 1. Бiблiогр.: 5 назв.
©Бобирь Д. В. та ін., укладання, 2009
©Вид-во Дніпропетр. нац. ун-ту залізн. трансп. ім. акад. В. Лазаряна
Загальні вимоги до виконання курсового проекту
Завдання на курсовий проект з методичними вказівками включає вихідні дані для вибору і обґрунтування застосування основних елементів екіпажної частини, розрахунки на міцність елементів пружного підвішування, основних характеристик пружного підвішування проектного тепловоза, частоти коливань підресореної маси тепловоза, критичної швидкості руху та демпфування коливань.
Пояснювальна записка та креслення повинні виконуватися згідно з вимогами ЕСКД.
Виконуючи курсовий проект (КП), необхідно враховувати вимоги, що наведено у [1, 2].
Зміст курсового проекту
Пояснювальна записка окрім початкових даних повинна містити наступні розділи:
1.Розрахунок техніко-економічних показників проектного тепловоза.
2.Розробка екіпажної частини тепловоза та визначення її основних параметрів.
3.Динамічне вписування тепловоза в криву (дані методичні вказівки). Курсовий проект підлягає захисту.
Початкові дані
Основні початкові дані якщо не надані керівником курсового проекту, обираються за табл. А.1, що наведено у додатку А. Якщо для проектних розрахунків бракує даних, студент має право приймати їх самостійно, керуючись відповідними параметрами тепловоза-зразка.
Розрахункові схеми приведені в додатку Б.
1. ЗАГАЛЬНІ ВІДОМОСТІ
Рішення задач динамічного вписування передбачає визначення максимальної швидкості руху локомотива в кривій, при якій забезпечуються безпека руху і комфортабельність для обслуговуючого персоналу і пасажирів. Безпека руху оцінюється критеріями безпеки, які характеризують величини бічних зусиль на рейки та пружне відтискання рейок під дією цих зусиль. Надмірна величина бічного зусилля може привести до сповзанні колеса на
3
рейку і сходу, а велика величина відтискання – до розшивання колії. Критерієм комфортабельності є величина незгашеного прискорення αн.
Його величина не повинна бути більше 0,7 м/с. Це – максимальне прискорення, при якому людина не переживає почуття страху при входу екіпажа в криву.
При динамічному вписуванні визначаються горизонтальні зусилля, що передаються колесами локомотивного екіпажа на головки рейок. На рухомий локомотив в кривій діє множина сил, весь комплекс яких, врахувати не завжди вдається. Тому динамічне вписування виконують з деякими припущеннями, оскільки враховується тільки наступні сили:
а) горизонтальні складові сили тертя бандажів о рейки F1 − F6 ; б) відцентрова сила локомотива С;
в) горизонтальна складова ваги локомотива, що виникає від підвищення зовнішньої рейки в кривій С1;
г) бічні реакцій з боку рейок від дії упираючих в них коліс (направляючі зусилля) Y1 −Y6 ;
д) бічні тиски коліс на головки рейок Y1′−Y6′, що являють різницю між направляючими зусиллями і силами тертя бандажів о рейки;
е) повертаючи сили та моменти за наявності в екіпажі повертаючих пристроїв, а також моменти тертя в опорах.
Реакції з боку головок рейок є зовнішніми силами, що направляють рух екіпажа в кривій. Цей рух може бути представлено у вигляді безперервної суми двох рухів – поступального уздовж подовжньої осі екіпажа та обертального навколо точки, так званої центром повороту або полюсом візка Ω. Відстань від осей колісних пар до центра повороту візка називають полюсною відстанню.
Залежно від швидкості руху тепловоза в кривій візок може займати або положення найбільшого перекосу, коли перша колісна пара притиснена до зовнішній рейці, а задня – до внутрішньої (на рис. 3.1 лінія НП), або положення вільної установки, коли задня колісна пара не передає зусилля на рейки (лінія ВУ), або положення високих швидкостей (установка по хорді), коли обидві колісні пари притиснути до зовнішньої рейки (лінія ВШ). Перпендикуляри, опущені з центра кривої на лінії баз візків дають положення центрів повороту останніх.
2. СКЛАДАННЯ РІВНЯНЬ РІВНОВАГИ СИЛ І МОМЕНТІВ
Залежності направляючих зусиль Y1 = f (V ) , Y3 = f (V ) і бічного тиску Y ′= f (V ) зазвичай називають динамічним паспортом локомотива в горизон-
4

тальній площині. Для побудови цього паспорта необхідно розв’язати систему рівнянь рівноваги візка для різних її положень в кривій, обумовлених швидкістю руху локомотива.
Рис. 2.1. Можливі установки візка в кривій під час руху
Візок вважається таким, що знаходиться в рівновазі, якщо сили і моменти, прикладені до нього, врівноважуються зовнішніми силами, тобто реакціями рейок. Для переднього візка (див. рис. Б.1) реакціями рейок є направляючі зусилля Y1 і Y3 .
Спочатку викреслюється схема візка тепловоза та наносяться всі основні сили та моменти, що діють на нього. Для нанесення на схему центра повороту Ω припускається, що візок знаходиться в положенні найбільшого перекосу. Для цього положення полюсна відстань першої (направляючий) колісної пари визначається за формулою
|
х = b |
+ |
Rд |
(2σ + ) , |
(2.1) |
|
|
|
|||||
|
1 |
2 |
|
b |
|
|
|
|
|
|
|||
де b |
– база візка, м; |
|
|
|
|
|
Rд |
– радіус кривої для динамічного вписування, м; |
|
||||
2σ + – ширина колії зазорів, мм. |
|
|||||
5
Ширина колії зазорів 2σ + при динамічному вписуванні приймається мінімальною з урахуванням припустимих відхилень від номінальних розмірів. Згідно ПТЕ:
– на прямих ділянках колії і на кривих радіусом 350 м і більш
2σ =1520+−64 −(1440+−33 + 2 330−8 ) – при швидкості руху до 120 км/год; 2σ =1520+−64 −(1440+−31 + 2 330−5 ) – при швидкості від 120 до 140 км/год.
– при радіусі кривої від 349 до 300 м – |
=10 мм; |
|
|
||||||||
– при радіусі кривої 299 м і менш – =15 мм. |
|
|
|||||||||
Полюсні відстані другої і третьої колісних пар знаходяться за схемою |
|||||||||||
(див. рис. Б.1–Б.4). |
|
|
|
|
|
|
|
|
|
||
Для схем з жорстким шкворнем (див. рис. Б.1) (тепловози ТЭ7, ТЭ3, |
|||||||||||
ТЭМ2, ТЭМ5, 2ТЭ10Л, М62) рівняння рівноваги мають вигляд: |
|
|
|||||||||
−Y + C −C +Y + 2F cos α |
− 2F cos α |
3 |
=0, |
|
|
||||||
|
1 |
1 |
3 |
1 |
1 |
3 |
|
|
|
(2.2) |
|
|
|
+C1x2 |
+Y3x3 −(Mв + M тр)− 2F1r1 − 2F2 sin α2S − |
2F3r3 =0. |
|||||||
Y1x1 −Cx2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
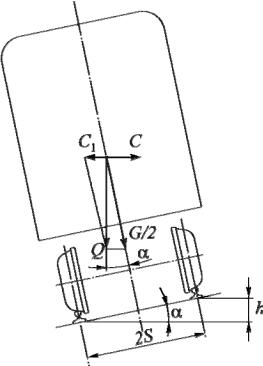
У цих рівняннях: Y1 , Y3 – направляючі зусилля від рейок, що забезпечують поворот візка в кривій; С – відцентрова сила від маси тепловоза, що припадає на візок; С1 – горизонтальна сила, що виникає від підвищення зов-
нішньої рейки на величину h в кривій (рис. 2.2); (Мп + Мтр) = М – сумар-
ний момент від повертаючих сил і сил тертя в опорно-повертаючих пристроях при повороті візка навколо центрального шкворня; F1, F2 , F3 – сили тертя в опорних точках коліс, що направлені перпендикулярно променям r1 , r2 , r3 ; S ≈0,8 м – половина відстані між колами кочення бандажів коліс.
Рівняння рівноваги для схеми з пружним зв'язком між кузовом і візками тепловозів 2ТЭ116, 2ТЭ10В(М), ТЭП60, ТЭП70 мають вигляд:
– для переднього візка тепловозів 2ТЭ116, 2ТЭ10В(М) (див. рис. Б.2)
−Y + C −C + 2F cos α |
− 2F cos α |
3 |
+Y =0, |
(2.3) |
||||
|
1 |
1 |
1 |
1 |
3 |
3 |
||
Y1x1 −Cxц +C1xц − 2F1r1 − 2F2 sin α2S − 2F3r3 − Mв − М +Y3x3 =0; |
|
|||||||
6
|
|
|
|
|
|
Рис. 2.2. |
|
|
|||||
– для переднього візка тепловоза ТЭП60 |
(див. рис. Б.3) |
|
|||||||||||
−Y + C −C + 2F cos α |
− 2F cos α |
3 |
+Y =0, |
|
|||||||||
|
1 |
|
1 |
1 |
1 |
3 |
|
|
|
3 |
(2.4) |
||
|
|
−Cxц +C1xц − 2F1r1 |
− 2F2 sin α2S − |
2F3r3 − Mв − Мтр +Y3x3 = 0; |
|||||||||
Y1x1 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– для переднього візка тепловоза ТЭП70 |
(див. рис. Б.4) |
|
|||||||||||
−Y + C −C + 2F cos α |
− 2F cos α |
3 |
+Y =0, |
(2.5) |
|||||||||
|
1 |
1 |
1 |
1 |
|
3 |
|
|
3 |
|
|||
Y1x1 −Cxц +C1xц − 2F1r1 − 2F2 sin α2S − |
2F3r3 − Mв − Мт +Y3x3 = 0. |
|
|||||||||||
3. ВИЗНАЧЕННЯ СИЛ, ЩО ВХОДЯТЬ В РІВНЯННЯ РІВНОВАГИ
Середні значення сил тертя в опорних точках коліс вважаються рівними для всіх колісних пар тепловоза. Приблизно вони можуть бути визначені за формулою
2Fi = 2Пfтр, |
(3.1) |
де2П – статичний тиск від колісної пари на рейки;
fтр = 0,25 – коефіцієнт тертя між рейками і бандажами.
Утривісних візків сучасних тепловозів вільний розбіг середньої колісної пари досягає ±14 мм на бік, тому перша складова від сили F2 , що дорівнює
7
2F2 cos α2 , на раму візка не передається. При складанні рівняння рівноваги сил ця складова не враховується, при складанні рівняння рівноваги моментів враховується тільки друга, та, що діє уздовж рейок, складова сили F2 , яка дорівнює 2F2 sin α2 .
Відцентрова сила, що припадає на візок (див. рис. 2.2)
С = |
GV 2 |
|
|
|
, |
(3.2) |
|
|
|||
|
3,62 gR |
|
|
|
д |
|
|
Сила від підвищення зовнішньої рейки (див. рис. 2.2)
С |
= G h . |
(3.3) |
1 |
2 S |
|
У формулах (3.2–3.3): G – частина ваги тепловоза, що припадає на візок, кН; g =9,81 м/с2 – прискорення вільного падіння; Rд – радіус кривої для ди-
намічного вписування, м; h – підвищення зовнішньої рейки в кривій, м. Значення cos αi , sin α2 , ri визначаються за геометричними співвідно-
шеннями.
У рівняннях (2.2–2.5) невідомими є три величини: направляючі зусилля першої Y1 і третьої Y3 колісних пар і відцентрова силаС. Для розв’язання цих рівнянь можна застосувати методи припущень або аналізу граничних умов [5].
4. ВИЗНАЧЕННЯ СУМАРНИХ МОМЕНТІВ СИЛ ТЕРТЯ ТА ПОВЕРТАЮЧИХ МОМЕНТІВ
Всі приведені в завданні локомотиви мають візкову екіпажну частину, яка складається з двох тривісних візків. Наявність візків, що мають можливість повертатися на деякий кут відносно кузова, дозволяє локомотиву успішно проходити криві ділянки колії при значній довжині його бази. Крім того, середні колісні пари візків мають вільний розбіг в рамі візка (зазвичай ±14 мм), що поліпшує проходження візка в кривих малого радіусу. Для зниження динамічних бічних зусиль на рейки крайні колісні пари мають з рамою візка пружний зв'язок або за допомогою пружинних осьових упорів (ТЭ3, ТЭ7, ТЭМ2), або за допомогою буксових повідків з гумовими амортизаторами (2ТЭ116, 2ТЭ10В,
ТЭП60, ТЭП70).
За типом зв'язку з кузовом візки можна розділити на дві групи: з жорст-
8
ким шкворнем і з пружним шкворневим пристроєм. До першої групи відносяться візки тепловозів ТЭ7, ТЭ3, ТЭМ2, ТЭ10Л, М62 та ін. У візків другої групи (тепловози 2ТЭ116, 2ТЭ10В(М), ТЭП60, ТЭП70) є пружний зв'язок з кузовом, при якому забезпечується як поворот візка відносно кузова, так і поперечне переміщення останнього відносно візка. Пружний зв'язок візків з кузовом у тепловозів різних серій має свої особливості. Ці особливості полягають в розташуванні опорно-повертаючих пристроїв на візку, їх конструкції, а також конструкції шкворневого або безшкворневого зв'язку кузова з візками.
Візки тепловозів ТЭ7, ТЭ3, 2ТЭ10Л, М62 (див. рис. Б.1) щелепні з центральним жорстким шкворнем. База візка b = 4, 2 м. Колісні пари та роликові опорно-повертаючі пристрої відносно шкворня розташовані симетрично. Радіус установки опорно-повертаючих пристроїв R =1,365 м. При повороті візка навколо шкворня за рахунок набігання роликів на похилі поверхні опорних плит створюється повертаючий момент Мв, а також, за рахунок повороту опор відносно кузова – момент тертя Мтр. У тепловоза ТЭ7 при куті
нахилу опорних плит α =3о30 Мв =31,30 кН·м і куті повороту опор β=1,5° Мтр =21,6 кН·м, сумарний момент, що перешкоджає повороту візка, у тепловоза ТЭ3 при α =2° Мв =17,95 кН·м, при β=5° Мтр =13,8 кН·м, сумарний момент М =31,75 кН·м.
У тепловоза ТЭМ2 візок відрізняється від описаної вище конструкції опорами тертя. Повертаючий момент відсутній. Після виходу тепловоза з кривій повернення візків в співвісне з кузовом положення відбувається за рахунок гребенів бандажів колісних пар. Момент тертя визначається як добуток сил тертя в опорах на відстань R від центру шкворня до осі опори. При навантаженні на опори 380 кН і коефіцієнті тертя fтр =0,1 Мтр =38 кН·м.
Візки тепловозів 2ТЭ116, 2ТЭ10В(М) (див. рис. Б.2) безщелепні з симетричним розташуванням колісних пар. База візка b =3,7 м. Кузов спирається на візок, через чотири комбіновані гумовороликові опори, що є набором семи гумових елементів діаметром 280 мм і завтовшки 35 мм з привулканізованими до них пластинами завтовшки 2 мм кожна і роликової опорою.
На рамі візка опори встановлені так, щоб ролики перекочувалися по дотичній до кола, описаного з центру шкворня радіусом, що дорівнює міжцентровій відстані опори і шкворня. Для передніх опор цей радіус R1 =1632 мм, а
9
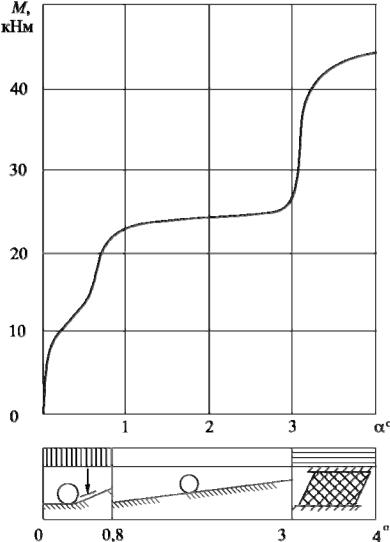
для задніх R2 =1232 мм. При повороті візка відносно кузова ролики перекочуються по похилих поверхнях опор (кут нахилу 2°), створюючи повертаючий момент Мв. Крім повертаючого моменту повороту візка перешкоджає момент тертя Мтр в рухомих деталях опор, що сполучаються. Цей момент необхідний для демпфування коливань виляння візка відносно шкворня. Експериментальна залежність сумарного моменту (М = Мв + Мтр) від кута по-
вороту візка наведено на рис. 4.1.
Рис. 4.1. Залежність сумарного моменту від кута повороту візка
Поворот візка починається після подолання початкового моменту тертя (близько 4,0 кН·м). При повороті на кут до 0,8° момент лінійно зростає до 21,0 кН·м, далі, при повороті до 3°, він досягає 24–25 кН·м. При куті повороту 3° кутова рухливість візка обмежується корпусом опори і надалі забезпе-
10