

Var_zavd_Excel
.pdfМетодичні вказівки до виконання та оформлення індивідуального завдання з дисципліни
“Обчислювальна техніка і програмування” на тему “Розрахунок кріплення кран-балки з використанням
програми Excel” .

Варіанти завдань і вхідні дані
для виконання індивідуального завдання “Розрахунок кріплення кран-балки з використанням програми Excel” з дисципліни “Обчислювальна техніка і програмування”
Умова задачі. Відомі параметри кран балки (стріли баштового крана підвісного моста, консолі тощо). Довжина балки - L м., відстань від точки опори до точки підвішування вантажу -Z м., координата кріплення – А м. і кут нахилу підвісного каната відносно балки α (в градусах), вага вантажу, який піднімається, G н. (ньютон).
Потрібно визначити:
•значення реакцій X та Y в точці опори О кран балки і зусилля P в підвісному канаті при заданих (фіксованих) значеннях координат і куті нахилу каната (для усіх варіантів завдання);
•значення реакцій X або Y в точці опори О кран балки або силу P у підвісному канаті в залежності від розташування вантажу на балці крана, точки кріплення каната або кута нахилу каната (див. свій варіант задачі і розрахункової схеми);
•сформувати вектор значень для функцій X або Y або P у відповідності до номера задачі та розрахунковою схемою (див. рис.1,рис.2) і вивести його в табличній формі;
•знайти максимальне і мінімальне значення досліджуваної функції;
•побудувати графік функції.
Варіанти розрахункової схеми подані на рис.1 і рис.2
|
|
|
P |
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
0 |
|
α |
Psin(α) |
|
X |
|
0 |
|
α |
Psin(α) |
|
|
|
|
|
|
||||||
|
A |
|
Pcos(α) |
G |
|
|
Y |
Z |
G |
Pcos(α) |
|
|
|
|
|
|
|
||||||
Y |
Z |
|
|
|
|
A=L |
|
|
|||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Рис.1 |
|
|
|
|
|
Рис.2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
Варіанти завдань та дані для обчислень подані в таблиці 1.
1.Пояснювальну записку оформити в окремому зошиті або на листах формату А4. 2.Зіт повинен включати такі розділи:
▫зміст;
▫постановку задачі і рисунок розрахункової конструкції (див. свій варіант);
▫систему алгебраїчних рівнянь, що описують рівновагу механічної системи;
▫розрахункові співвідношення і чисельне розв’язання для заданих (фіксованих) значень координат з врахуванням розмірностей вхідних даних (для заданого варіанта);
▫дослідження заданої функції (визначається № задачі):
-діапазон і крок зміни аргументу;
-масиви значень аргументу і заданої функції;
-максимальне і мінімальне значення сили;
▫результати в табличній і графічній формі;
▫аналіз результатів (висновки);.
Варіант завдання вибирається студентом за його порядковим номером у журналі групи з наступної таблиці
|
|
|
|
|
|
|
Таблиця1. |
|
|
|
|
|
|
|
|
№,№ |
А |
Z |
L |
α |
G |
№ |
Діапазон зміни |
варіант / рис. |
(м) |
(м) |
(м) |
(градуси) |
(Н) |
задачі |
параметра |
1/ рис.1 |
1.5 |
3.0 |
5.0 |
8 |
500 |
№1 |
0 <Zi ≤ A |
2 / рис.1 |
1.7 |
3.4 |
5.5 |
12 |
600 |
№4 |
A ≤Ai ≤ L |
3 / рис.2 |
6.0 |
3.8 |
6.0 |
10 |
700 |
№3 |
0 <Zi ≤ L |
4 / рис.1 |
2.1 |
4.2 |
7.0 |
14 |
800 |
№6 |
A ≤Ai ≤ L |
5 / рис.1 |
2.3 |
4.6 |
7.5 |
16 |
900 |
№3 |
0 <Zi ≤ A |
6 / рис.1 |
2.5 |
5.0 |
8.0 |
18 |
1000 |
№2 |
A <Zi ≤ L |
7 / рис.1 |
2.7 |
5.4 |
9.0 |
20 |
1100 |
№5 |
A ≤Ai ≤ Z |
8 / рис.2 |
10.0 |
6.2 |
10.0 |
24 |
1300 |
№1 |
0 <Zi ≤ L |
9 / рис.2 |
11.0 |
7.0 |
11.0 |
28 |
1500 |
№3 |
0 <Zi ≤ Z |
10 / рис.1 |
3.7 |
7.4 |
12.0 |
30 |
1600 |
№7 |
α ≤αi ≤ 60 |
11 / рис.2 |
14.5 |
7.0 |
14.5 |
25 |
1700 |
№1 |
0 <Zi ≤ Z |
12 / рис.1 |
4.1 |
8.2 |
13.0 |
34 |
1800 |
№8 |
α ≤αi ≤ 60 |
13 / рис.1 |
4.3 |
8.6 |
13.5 |
36 |
1900 |
№6 |
A ≤Ai ≤ Z |
14 / рис.1 |
4.4 |
8.8 |
14.0 |
38 |
2200 |
№2 |
0 <Zi ≤ L |
15 / рис.2 |
14.5 |
8.5 |
14.5 |
36 |
2100 |
№7 |
α ≤αi ≤ 60 |
16 / рис.1 |
4.0 |
8.0 |
15.0 |
34 |
2000 |
№1 |
0 <Zi ≤ L |
17 / рис.2 |
12.5 |
7.5 |
12.5 |
32 |
1900 |
№8 |
α ≤αi ≤ 60 |
18 / рис.1 |
3.6 |
7.2 |
12.0 |
30 |
1800 |
№1 |
A ≤Zi ≤ L |
19 / рис.1 |
3.4 |
6.8 |
11.0 |
50 |
1700 |
№2 |
0 <Zi ≤ A |
20 / рис.1 |
3.2 |
6.4 |
10.0 |
28 |
1600 |
№4 |
A <Ai ≤ Z |
21 / рис.1 |
3.0 |
6.0 |
9.5 |
26 |
1500 |
№5 |
A ≤Ai ≤ L |
22 / рис.1 |
2.8 |
5.6 |
9.0 |
24 |
1400 |
№2 |
0 <Zi ≤ L |
23 / рис.1 |
2.6 |
5.2 |
8.0 |
22 |
1300 |
№3 |
A ≤Zi ≤ L |
24 / рис.1 |
2.4 |
4.8 |
7.5 |
20 |
1200 |
№6 |
0 <Ai ≤ Z |
25 / рис.1 |
2.2 |
4.4 |
7.0 |
18 |
1100 |
№2 |
0 <Zi ≤ Z |
26 / рис.1 |
2.0 |
4.0 |
6.5 |
16 |
1000 |
№4 |
0 <Ai ≤ Z |
27 / рис.1 |
1.8 |
3.6 |
6.0 |
14 |
900 |
№5 |
0 <Ai ≤ Z |
28 / рис.1 |
1.6 |
3.2 |
5.0 |
12 |
800 |
№3 |
0 <Zi ≤ L |
29 / рис.1 |
3.5 |
7.2 |
11.0 |
25 |
1650 |
№7 |
α ≤αi ≤ 55 |
30 / рис.2 |
12.8 |
7.0 |
12.8 |
28 |
1900 |
№1 |
0 <Zi ≤ Z |
Умови задач №1-№8, для яких у таблиці 1 приведені діапазони зміни параметра, приведені на наступній сторінці.
ЗАДАЧА № 1
Для заданого кута нахилу каната знайти значення горизонтальної сили X в залежності від заданого діапазону зміни точки підвішування вантажу. Вивести таблицю значень і побудувати графік функції X = f (Zi).
ЗАДАЧА № 2
Для заданого кута нахилу каната знайти значення сили, що виникає в канаті, в залежності від заданого діапазону зміни точки підвішування вантажу. Вивести таблицю значень і побудувати графік функції P = f (Zi)
ЗАДАЧА № 3
Для заданого кута нахилу каната знайти значення вертикальної сили в залежності від заданого діапазону зміни точки підвішування вантажу. Вивести таблицю значень і побудувати графік функції Y = f(Zi) .
ЗАДАЧА № 4
Для заданого кута нахилу каната і координати вантажу знайти значення горизонтальної сили в залежності від заданого діапазону зміни точки кріплення каната. Вивести таблицю значень і побудувати графік функції X = f (Ai).
ЗАДАЧА № 5
Для заданого кута нахилу каната і координати вантажу знайти значення сили, що виникає в канаті в залежності від заданого діапазону зміни точки кріплення каната. Вивести таблицю значень і побудувати графік функції P = f (Ai)
ЗАДАЧА № 6
Для заданого кута нахилу каната і координати вантажу знайти значення вертикальної сили в залежності від заданого діапазону зміни точки кріплення каната. Вивести таблицю значень і побудувати графік функції Y = f (Ai).
ЗАДАЧА № 7
Для заданої координати вантажу знайти значення горизонтальної сили в залежності від діапазону зміни кута нахилу каната. Вивести таблицю значень і побудувати графік функції
X = f(αi).
ЗАДАЧА № 8
Для заданої координати кріплення каната знайти значення сили, що виникає в канаті в залежності від діапазону зміни кута нахилу каната. Вивести таблицю значень і побудувати графік
функції P = f(αi).
Методичні вказівки для виконання індивідуального завдання
1. Постановка задачі
1.1 Система рівнянь, що описує задану конструкцію
Сума моментів діючих сил відносно базової точки 0 дорівнює
P sin(α) A = G Z
Сума проекцій сил на вісь Х дорівнює
X − P cos(α) = 0
Сума проекцій сил на вісь Y дорівнює
Y+ P sin(α) = G
1.2.Аналітичний розв’язок системи лінійних алгебраїчних рівнянь.
З першого рівняння знаходимо зусилля P в канаті: |
|
||||||
P = G |
|
Z |
|
|
. |
(1) |
|
Asinα |
|||||||
|
|
|
|||||
З другого рівняння знаходимо величину реакції опори Х : |
|
||||||
X = G |
Z cosα . |
(2) |
|||||
|
Asinα |
|
|||||
З третього рівняння після підстановки P і перетворення, знаходимо величину реакції опори |
|||||||
Y : |
|
|
Z |
|
|
||
Y = G |
|
|
|
|
|||
1 |
− |
|
|
. |
(3) |
||
A |
|||||||
|
|
|
|
|
|||
1.3. Розв’язок системи рівнянь матричним методом
Система 3-х алгебраїчних рівнянь:
a11 x1 + |
a12 x2 + |
|
a21 x1 + |
a21 x2 |
+ |
a311 x1 + a31 x2 |
+ |
|
a13 x3 = b1 a21 x3 = b2 a31 x3 = b3
в матричній формі записується наступною рівністю:
A X = B
де A – матриця коефіцієнтів при невідомих; X – вектор невідомих (вектор розв’язку); B – вектор правих частин рівняння.
a |
a |
a |
|
11 |
12 |
13 |
|
A = a21 |
a22 |
a23 |
|
|
a32 |
|
|
a31 |
a33 |
||
x |
|
b |
|
1 |
|
1 |
|
X = x2 |
|
B = b2 |
|
|
|
|
|
x3 |
|
b3 |
|
Для отримання вектора невідомих достатньо виконати множення |
оберненої матриці |
коефіцієнтів на матрицю стовпець правих частин: |
|
X = A−1 B |
(4) |
Отримання оберненої матриці і технологія множення квадратної матриці на матрицю стовпець розглядаються у відповідних розділах вищої математики. В середовищі додатку Excel ми будемо використовувати вбудовані функції МУМНОЖ і МОБР.

1.4. Підготовка матриць системи рівнянь |
|
|
|
|
Запишемо відповідні матриці системи лінійних рівнянь з невідомими x1 = X, |
x2 = Y і x3 = P ): |
|||
|
0 |
0 |
Asin(α) |
|
Матриця коефіцієнтів при невідомих: |
|
0 |
|
|
1 |
−cos(α) . |
|
||
|
0 |
1 |
sin(α) |
|
|
|
|
|
|
|
G Z |
|
|
|
Матриця стовпець правих частин рівнянь: |
|
0 |
. |
|
|
|
G |
|
|
|
|
|
|
|
|
X |
|
|
|
Матриця стовпець шуканих зусиль: |
|
|
. |
(5) |
Y |
||||
|
P |
|
|
|
|
|
|
|
|
1.5. Деякі рекомендації для розв’язку системи засобами Excel .
Перед тим, як скористатися вбудованими функціями Excel, необхідно продумати зовнішній вигляд таблиці (кількість і назви рядків і стовпців), тоді ввести усі вхідні дані. Крім того необхідно перевести в радіани заданий кут нахилу каната.
Формати комірок, вибраних для розв’язку системи рівнянь повинні бути числовими, а комірки і стовпці суміжними. Для користувача початківця не рекомендується набирати адреси комірок з клавіатури (часто забувається перехід з розкладки UK на розкладку EN)
При введенні матричних функцій МУМНОЖ і МОБР рекомендується скористатися Майстром функцій, який викликається інструментальною кнопкою  стандартної панелі
стандартної панелі
інструментів.
При введенні матричної функції МУМНОЖ необхідно виділити весь діапазон комірок, в яких буде розташований вектор розв’язку, тоді для отримання вектора розв’язку (5), необхідно у верхню комірку цього діапазону ввести формулу матричного множення (4).
Ввід формул з матричними операціями завжди завершується одночасним натисканням трьох клавіш Сtr + Shift і Enter (після такого завершення матрична формула обрамляється фігурними дужками ).
2. Дослідження сили.
(виконання цього розділу залежить від номера варіанта і номера задачі)
У кожному варіанті передбачається розв’язання, а потім дослідження однієї з трьох сил (X, Y або P), при цьому вони представляються як функції одного параметра f(A) , f(Z) або f(α) , а значення параметра задано діапазоном.
2.1 Обчислення досліджуваних функцій
Для проведення дослідження представимо шукані параметри як функції від змінної
величини – координати розташування вантажу на кран-балці - |
Z |
(для задач №1,№2 і №3). |
|||||
Аналогічно можна задати функції від координати закріплення каната A (для задач №4, №5 і №6 ) |
|||||||
і від кута нахилу каната (скосу) до кран-балки - α (для задач №7 і №8 ). |
|||||||
Для задач №1,№2 і №3 |
вирази функцій будуть мати вигляд: |
|
|
|
|||
|
Z |
|
Z cosα |
|
|
Z |
|
P(Z ) = G |
|
, X (Z ) = G |
|
, Y (Z ) = G 1 |
− |
|
. |
Asinα |
Asinα |
|
|||||
|
|
|
|
A |
|||
Для задач №4, №5 і №6 в якості аргументу цих функцій буде точка кріплення каната - A, а для задач №7 і №8 кут нахилу каната α.
2.2 Задання діапазону аргумента.
Розглянемо приклад задання діапазону зміни координати вантажу - Z, у якому буде визначатися значення однієї з функцій (див. свою задачу). Ці точки розташуємо через рівні проміжки.
Для прикладу, координату розміщення вантажу змінюємо в діапазоні від 0 до L м. із кроком зміни 1 м.
Кількість точок N в заданому діапазоні, можна підрахувати, якщо попередньо задати діапазон і крок зміни координати вантажу:
Zmin = 0; Zmax |
= L; ∆z =1, |
N = |
(Zmax − Zmin ) |
+1. |
|
|
|||||
|
|
|
|
∆z |
|
Таким чином, при L = 10 змінна Z приймає N = 11 значень з вказаного діапазону. |
|||||
Для отримання діапазону значень аргумента, необхідно спочатку в комірку робочого |
|||||
аркуша Excel ввести |
значення |
Zmin , |
тоді обчислити наступне його значення, тобто записати |
||
формулу обчислення |
Zmin + ∆z |
нижче у комірку наступного рядка і методом “перетягування” |
|||
скопіювати цю формулу вниз у діапазон комірок. Останнім значенням діапазону повинна бути величина Zmax .
2.3 Обчислення діапазону значень функції.
Після задання діапазону зміни аргументу (у нашому випадку координати вантажу) можна приступати до обчислення значень функції в точках заданого діапазону. Для цього в комірку, суміжну з початковим значенням аргументу необхідно увести формулу заданої функції і методом “протягування” скопіювати її у діапазон.
Якщо у формулі присутні параметри, що під час копіювання не повинні змінювати свої адреси (наприклад, адреса комірки, що містить значення кута) необхідно користуватися абсолютною адресацією.
2.4. Аналіз результатів обчислень.
2.4.1 Пошук екстремальних значень діючих сил
Скористаємося вбудованими функціями Excel і знайдемо максимальні і мінімальні значення досліджуваної функції (залежить від номера задачі). Для цього слід скористатися функціями МАКС для пошуку максимального значення і МИН для пошуку мінімального елемента. У нашому випадку вибірка може відбуватися з діапазонів значень функції X(Z), P(Z) або Y(Z), обчислених для відповідних аргументів. Тому, через дискретність кроку ∆Z знайдені екстремальні значення можуть іноді не відповідати фактичним.
Перед тим, як скористатися цими функціями проаналізуємо їх поведінку в заданих
діапазонах. Функції X (Z ) = G |
Z cosα |
і P(Z ) = G |
Z |
|
можуть приймати тільки додатні |
|||
Asinα |
Asinα |
|||||||
|
|
|
|
|
||||
значення тому що cosα і sinα для заданого кута (діапазону) мають додатні значення. |
||||||||
|
Z |
|
|
|
|
|||
Функція Y (Z ) = G 1 − |
|
|
може приймати як додатні, |
так і від’ємні значення. Знак цієї |
||||
|
|
|||||||
|
A |
|
|
|
|
|||
функції залежить від вибору напрямку вектора сили Y.
Ці відомості нам необхідні для того, щоб зробити правильні висновки про найбільші і найменші значення сил, які виникають в опорі О та канаті (рис1, рис 2.). Так, якщо найбільші значення сил X і P можна знайти визначаючи екстремуми функцій X(Z) і P(Z), то для сили Y, функція Y(Z) якої має області додатних і від’ємних значень, слід шукати екстремуми в кожній з них і, крім цього, точку зміни її знаку. Пошук екстремумів для цієї функції у всьому діапазоні може привести до неправильних висновків, щодо максимального значення реакції опори О.
2.4.2. Пошук екстремального значень вертикального зусилля.
Для пошуку максимального значення необхідно знайти спочатку максимум додатних значень за допомогою функції МАКС(діапазон), а потім застосувати складену функцію ABS(МИН(діапазон)) тому що вона має область як додатних так і від’ємних значень.
У зв'язку з тим, що функція Y(Z) має області додатних і від’ємних значень, особливий інтерес викликає координата вантажу, при якій вертикальне зусилля дорівнює нулю.
|
|
|
Z |
|
З аналізу функції |
Y (Z ) = G 1 |
− |
|
випливає, що вертикальна складова сили |
|
||||
|
|
|
A |
|
перетворюється в нуль, коли координата вантажу збігається координатою точки кріплення каната, тобто мінімум модуля цієї функції дорівнює нулю.
У діапазоні значень Y(Z) може бути відсутнє нульове значення. Це пояснюється невдалим (не продуманим) кроком ∆Z.
3 Графіки досліджуваних функцій та їх аналіз
Крім перегляду діапазону чисел, по суті одновимірних масивів, можна візуалізувати їх, побудувавши графіки (графік) заданих (заданої) функції. Для одновимірного масиву зручно скористатися двовимірним графіком у декартових координатах.
3.1. Побудова графіка фунцйії .
Швидку побудову двовимірного графіка функції можна одержати за допомогою Майстра діаграм за чотири кроки. Перед викликом майстра доцільно виділити діапазони значень аргументу і функції. Тут варто пам'ятати, що за умовчанням Excel перший діапазон сприймає як аргумент функції, а другий як значення функції. Тому, якщо буде порушений цей порядок, доведеться уважно працювати на другому кроці Майстра діаграм.
На першому кроці вибираємо тип діаграми – Точкова, вид – із значеннями з’єднаними згладжуючими лініями. Далі, якщо правильно були задані діапазони, другий крок (Джерело даних) може бути формальним. На третьому кроці введіть назви осей і графіка. На останньому кроці рекомендується вибрати побудову графіка на окремому аркуші. Після появи графіка на екрані, варто уважно переглянути його вміст. Можливо, доведеться прибрати легенду, відформатувати осі або виправити помилки. Для того, щоб внести зміни в побудовану діаграму необхідно ввести покажчик мишки в область діаграми і правою кнопкою викликати контекстне меню і вибрати у ньому потрібний пункт (як правило, у пункті Параметри діаграми можна знайти відповідь на питання, які при цьому виникають).
3.2. Аналіз графічних результатів |
|
|
|
|
|
|||||
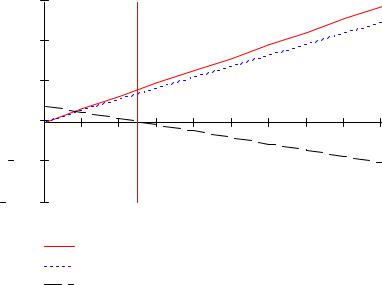
Як приклад, для зручності аналізу нижче приведено суміщений графік трьох сил |
||||||||||
. 4 |
|
|
Суміщений графік функцій |
|
|
|||||
|
|
|
|
|
|
|
|
|
||
1.5 10 |
|
|
|
|
|
|
|
|
|
|
. 4 |
|
2.5 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
1 |
10 |
|
|
|
|
|
|
|
|
|
5000 |
|
|
|
|
|
|
|
|
|
|
Сила |
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
5000 |
|
|
|
|
|
|
|
|
|
|
. |
4 |
|
|
|
|
|
|
|
|
|
1 10 |
|
|
|
|
|
|
|
|
|
|
Координата вантажу
Функція P(Z)
Функція X(Z)
Функція Y(Z)
Рис 3.
На поданих вище графіках спостерігається загальна для усіх функцій закономірність - зростання зусиль (чим далі від початку кран балки, тим більше зусилля). Горизонтальні зусилля і зусилля, що виникають у канаті мають тільки додатні значення тобто вони збігаються з напрямками, обраними нами на етапі постановки задачі (див.рис.1). Зусилля в канаті перевищують будь-яке інше досліджуване зусилля.
Вертикальне зусилля змінює свій знак у точці закріплення каната ( A = 2.5 m.). Правіше цієї точки починається область, у якій напрямок зусилля не збігається з напрямком ваги вантажу.
Найбільш сприятлива зона роботи тельфера знаходиться між початком балки і точкою кріплення каната (у цій зоні максимальні зусилля співмірні з вагою вантажу).
Особливий інтерес викликають кути нахилу каната в діапазоні 0 і 90 градусів. При 0 градусів - наші функції прямують до безмежності, тобто горизонтальна сила і сила в канаті досягають максимальних значень (конструкція не витримає такого навантаження - вона зруйнується!).
Якщо кут нахилу каната дорівнює 90 градусів (у нашій розрахунковій конструкції така ситуація не реальна), тоді знаменники наших функцій приймають максимально можливі значення і варто очікувати мінімального зусилля в канаті, а горизонтальне зусилля зникне взагалі.
Горизонтальне зусилля завжди менше зусиль у канаті тому що в чисельнику цій функції знаходиться cos(α), значення якого з ростом кута зменшується.
Очевидно, що вибір кута нахилу каната є одним з основних параметрів у заданій конструкції. Так, при α = 45o функції sinα і cosα приймають рівні значення і для нього складові сили в канаті стають рівними.
У завданні передбачені варіанти, у яких координата вантажу вважається постійною, а точка кріплення каната змінюється в заданому діапазоні. Так у задачах №№ 4, 5 і 6 нижня точка кріплення каната приймає різні значення, але верхня межа залишається постійною, а в задачах №7 і №8 точка кріплення каната вважається постійною як і координата вантажу, але кут нахилу каната слід змінювати в заданому діапазоні.
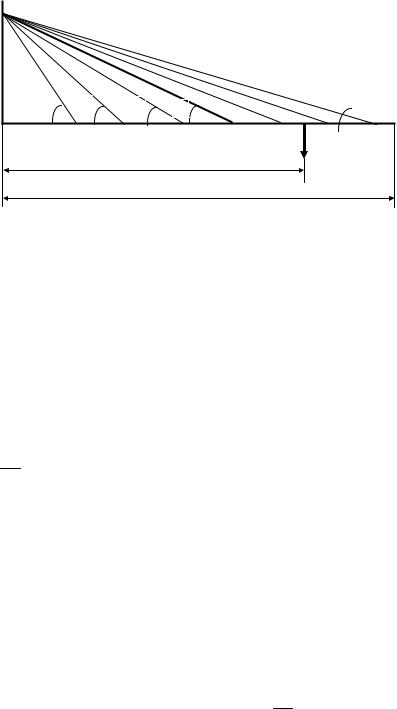
4. Рекомендації для розв’язку задач №4, №5, №6, №7 і №8.
Особливістю цих задач є те, що верхня точка кріплення каната залишається нерухомою, а координата нижньої точки кріплення змінюється відповідно до заданого варіанта (див. рис.4).
kvt |
|
|
|
|
|
αi-1 |
αi |
αi+1 |
α |
|
αn-1 |
|
Ai-1 |
Ai |
Ai+1 |
A |
An-1 |
|
|
Z |
|
|
G |
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
Рис4 |
|
|
Кут нахилу каната залежить від координати Аi, тому для кожного чергового обчислення
заданої функції: |
X ( Ai ) = G |
Z |
|
cos(αi ) (горизонтальна сила) або |
P( Ai ) = G |
Z |
|
|
sin(αi |
) Ai |
sin(αi |
) Ai |
|||||
|
|
|
|
(зусилля в канаті) необхідно передбачити обчислення αi .
Для заданого кута нахилу каната знаходимо координату верхньої точки кріплення каната
тобто довжину другого катета: kvt = A tan(αрад. ) , де А – |
координата нижньої точки кріплення |
каната (вона повинна відповідати варіанту). |
|
Для обчислення кута відповідній координаті Аi |
необхідно щоразу обчислювати αi : |
αi = arctan kvt .
Ai
Якщо виключити αi з формул для P(Ai ) та X ( Ai ) , тоді досліджувані функції будуть мати такий вигляд:
|
Z |
|
|
|
|
Z |
|
|
|
|
|
|
||
P(Ai ) = G |
|
|
, |
X (Ai ) = G |
|
|
kvt |
) , . |
||||||
|
|
|
|
|
|
|
|
cos(arctg |
|
|
||||
|
|
|
|
|
|
A |
||||||||
|
|
|
|
|
|
|
||||||||
|
kvt |
|
|
kvt |
|
i |
|
|||||||
|
sin(arctg |
|
|
) Ai |
|
|
sin(arctg |
|
|
) Ai |
|
|
|
|
|
|
A |
|
|
|
A |
|
|
|
|
||||
|
|
i |
|
|
|
i |
|
|
|
|
||||
Для обчислення кута нахилу каната можна скористатися іншими тригонометричними залежностями, а з метою спрощення запису цих виразів можна ввести додаткові змінні. Студенту дається можливість самостійно виконати необхідні перетворення і спрощення і переконатися, що
функція X (A) приймає однакові значення рівні G Z .
kvt
Попередній аналіз функції P(A) дозволяє зробити висновок про характер її зміни: а) вона є неперервною монотонно спадаючою функцією;
б) наявність тригонометричних функцій свідчить про нелінійну залежність, викликану зміною кута нахилу каната;
в) екстремальні значення слід очікувати на границях заданого інтервалу зміни аргумента. На рис.4 подані очікувані графіки досліджуваних функцій.