

Preobr_UP
.pdf6.2. РЕВЕРСИВНЫЕ ИМПУЛЬСНЫЕ ПРЕОБРАЗОВАТЕЛИ ПОСТОЯННОГО ТОКА
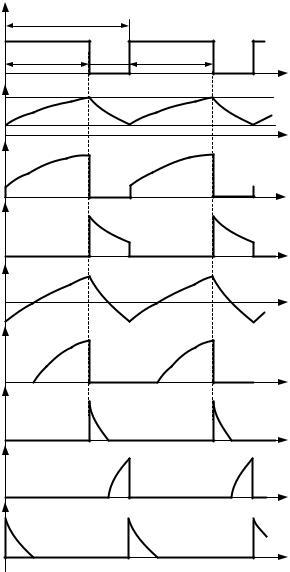
Для осуществления наряду с регулированием тока нагрузки еще и реверса служат реверсивные преобразователи. Обычно их выполняют на базе мостовой схемы(рис. 6.13), состоящей из ключей K1 - K4 и вентилей обратного тока B1 - B4 .
В схеме возможны следующие способы управления: 1. Способ симметричного управления.
2. Способ несимметричного управления.
3. Способ поочередного управления.
Симметричный способ иллюстрируется диаграммами рис. 6.13.
+ 
|
B1 |
K1 |
Zн |
K2 |
B2 |
|
Uпит |
|
|
|
|
||
|
|
|
|
|
||
|
B4 |
K4 |
E0 |
K3 |
B3 |
|
- |
|
|
а |
|
|
|
|
Uк |
|
|
|
||
|
|
|
|
|
||
|
|
Uпит |
t1 |
t2 |
t3 |
t4 |
|
|
tи1 |
tи2 |
|
tи1 |
t |
|
iн |
|
|
|
|
|
iК -К |
3 |
|
|
|
t |
|
1 |
|
|
|
|
|
|
iВ2 -В4 |
|
|
|
t |
||
|
|
|
б |
|
|
t |
|
|
|
|
|
|
|
|
|
Рис. 6.13. Реверсивный ИППТ |
|
|||
На интервале 0Kt1 открыты ключи K1 и K3 , и по нагрузке под
действием напряжения |
источника питания протекает токi |
|
. На |
интервале t1 Kt2 ключи |
K1 |
-K3 |
|
K1 и K3 закрываются, а открываются |
ключи |
||
K 2 и K 4 . Напряжение на нагрузке меняет полярность, а ток нагрузки под действием ЭДС самоиндукции протекает через вентилиB2 и B4 в
181

источник питания. Далее процессы повторяются. Среднее значение напряжения на нагрузке
Uн = |
Uпитtи1 |
- |
Uпитtи2 |
= Uпит (2γ -1), |
(6.51) |
T |
|
||||
|
|
T |
|
||
где γ = tи1 .
T
При активно-индуктивной нагрузке уравнение электромагнитных процессов при допущениях п. 6.1. имеет вид:
±U |
пит |
= i R |
+ L |
diн |
, |
|
(6.52) |
||
|
|||||||||
|
н |
н |
н |
dt |
|
|
|||
где (+) соответствует интервалу 0Kt1 , а (–) интервалу t1 Kt2 . |
|
|
|||||||
Решая (6.52) относительно iн |
и |
учитывая, что iн |
t = 0 |
= iн |
t = T , |
||||
получаем: |
|
|
|
|
|
|
|
|
|
iн1 0Kt1
iн2 t1KT
|
|
|
|
|
é |
|
|
æ |
|
- |
TRн |
|
gTRн |
ö |
|
|
Rнt |
ù |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
Uпит |
ê |
|
|
ç |
|
|
|
|
L |
|
|
e |
|
|
L |
÷ |
- |
ú |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
ê |
|
|
2è1 - e |
|
|
|
н |
|
|
н |
ø |
|
e |
Lн |
ú |
|
|||||||||||
= |
|
R |
1 |
- |
|
æ |
|
|
|
|
|
|
|
TRн |
ö |
|
|
|
|
|
(6.53) |
||||||||
|
|
ê |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ú |
|
|||||||||
|
|
|
|
н |
ê |
|
|
|
ç |
|
- e |
- |
Lн |
÷ |
|
|
|
|
|
|
ú |
|
|||||||
|
|
|
|
|
ë |
|
|
|
è1 |
|
|
|
|
|
ø |
|
|
|
|
|
|
û |
|
||||||
|
|
|
|
|
|
|
é |
|
æ |
|
- |
gTRн |
|
ö |
|
|
|
Rнt |
ù |
|
|
||||||||
|
|
|
|
|
|
|
ê |
|
ç |
|
|
|
|
|
|
÷ |
|
- |
ú |
|
|
||||||||
|
|
|
|
Uпит |
|
|
|
|
L |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
ê |
|
2èe |
|
|
|
|
н |
-1ø |
e |
|
Lн |
ú |
|
|
|||||||||||
= - |
|
R |
|
|
1 |
+ |
æ |
|
|
|
|
|
|
TRн |
ö |
|
|
|
|
, |
(6.54) |
||||||||
|
|
|
|
|
|
ê |
|
|
|
|
|
|
|
|
|
|
|
|
ú |
|
|
||||||||
|
|
|
|
н |
ê |
|
ç |
- e |
- |
|
Lн |
÷ |
|
|
|
|
|
ú |
|
|
|||||||||
|
|
|
|
|
|
|
ë |
|
è1 |
|
|
|
|
|
ø |
|
|
|
|
|
û |
|
|
||||||
|
|
|
æ |
-TRн |
|
|
- gTRн ö |
|
||||||||||
|
|
|
ç |
+ e |
L |
|
- 2e |
|
|
L |
÷ |
|
|
|||||
i |
= i |
= i |
= |
Uпит |
|
è1 |
|
н |
|
|
н |
ø |
, |
(6.55) |
||||
R |
æ |
|
|
|
|
TRн ö |
|
|||||||||||
н max |
к max |
в max |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
н |
ç |
|
|
|
- |
|
|
÷ |
|
|
|
|||
|
|
|
|
|
- e |
L |
|
|
|
|
||||||||
|
|
|
|
|
|
|
è1 |
|
н |
ø |
|
|
|
|||||
|
|
|
|
|
|
|
|
æ |
|
|
-TRн |
|
|
|
-TRн gTRн ö |
|
|
|||||||||||
|
|
|
|
|
|
|
|
ç |
|
|
|
L |
- 2e |
|
|
L |
|
|
|
L |
÷ |
|
|
|||||
i |
= i |
= i |
|
= - |
Uпит |
|
è1 + e |
|
н |
|
|
|
н e |
н |
ø |
. |
(6.56) |
|||||||||||
|
|
|
|
|
|
æ |
|
|
TRн ö |
|
|
|||||||||||||||||
н min |
к min |
в min |
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
н |
|
|
|
|
|
ç |
|
- |
|
|
|
÷ |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
||||||||||
Амплитуда пульсации тока нагрузки |
è1 |
- e |
|
|
н |
ø |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
æ |
|
|
|
- gTRн öæ |
|
-TRн - gTRн ö |
|
|
||||||||||||||||
|
|
|
|
ç |
- e |
|
L |
|
֍ |
|
|
|
|
L |
|
e |
L |
÷ |
|
|
||||||||
Diн = iн max - iн min = |
2Uпит è1 |
|
н |
|
øè1 - e |
|
|
|
н |
|
н |
ø |
. |
(6.57) |
||||||||||||||
|
R |
|
|
|
|
|
|
|
æ |
|
|
TRн ö |
|
|
|
|
|
|||||||||||
|
|
|
|
н |
|
|
|
|
|
ç |
|
- |
|
|
|
÷ |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
è1 - e |
н |
ø |
|
|
|
|
|
|
|
|
|||||
182

Амплитуда пульсаций выходного напряжения DUн = Diн Rн . Коэффициент пульсации
|
|
æ |
|
- gTRн öæ |
|
-TRн gTRн ö |
|
|||||||||||
|
|
ç |
- e |
|
L |
|
֍ |
- e |
|
|
L |
e |
L |
÷ |
|
|
||
Kп = |
DUн |
= |
2è1 |
|
н |
øè1 |
|
|
н |
н |
ø |
. |
(6.58) |
|||||
|
|
|
æ |
|
|
TRн ö |
|
|
|
|||||||||
U |
пит |
|
- |
|
|
|
|
|
||||||||||
|
|
|
ç |
L |
|
÷ |
|
|
|
|
|
|||||||
|
|
|
|
|
|
è1 |
- e |
н |
ø |
|
|
|
|
|
||||
Среднее значение тока нагрузки Iн = Uпит (2γ -1).
Rн
При работе на двигатель постоянного тока с противоЭДСE0 исходные уравнения принимают вид:
± (U |
пит |
- E |
0 |
)= i |
я |
R |
я |
+ L |
|
diя |
, |
(6.59) |
|
|
|||||||||||
|
|
|
|
|
я dt |
|
||||||
где Rя , Lя – активное сопротивление и индуктивность обмотки якоря. Из (6.59) получаем:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
é |
|
|
|
|
|
æ |
- |
|
TRя |
|
|
gTRя |
ö |
|
|
|
Rяt |
ù |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
Uпит - Е0 |
ê |
|
|
|
2 |
ç |
|
|
|
|
|
|
|
L |
|
|
|
|
e |
|
|
L |
|
÷ |
|
- |
ú |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
i |
|
|
|
ê |
|
|
|
è1 - e |
|
|
|
|
я |
|
|
|
|
я |
|
ø |
e |
Lя |
ú |
|
||||||||||||||||||||||||||||||||||||||||
= |
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
1 |
- |
|
|
|
|
|
æ |
|
|
|
|
|
|
|
TRя |
ö |
|
|
|
|
|
|
|
ú |
, |
||||||||||||||||||||||||
я1 |
0Kt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ê |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
я |
|
|
ê |
|
|
|
|
|
|
|
|
ç |
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
ú |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Lя |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ë |
|
|
|
|
|
|
|
|
è1 - e |
|
|
|
|
|
|
|
|
|
|
|
ø |
|
|
|
|
|
|
|
|
|
|
|
û |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
é |
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
|
|
- |
gTRя |
|
|
ö |
|
|
|
|
Rяt |
ù |
|||||||||||||||||||||||
|
|
|
|
|
|
Uпит |
|
ê |
|
|
|
|
E0 |
|
ö |
ç |
|
|
|
|
|
L |
|
|
- |
÷ |
- |
ú |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
i |
|
= - |
êæ1 |
- |
+ |
2èe |
|
|
|
|
|
|
я |
1ø |
e |
|
|
Lя |
ú , |
|||||||||||||||||||||||||||||||||||||||||||||
t |
|
|
|
|
|
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
TRя |
|
ö |
|
||||||||||||||||||||||||||||||||||||||||||
я2 |
KT |
|
|
|
|
|
R |
|
|
êç |
|
|
U |
|
|
|
|
æ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ú |
|||||||||||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
я |
|
|
è |
|
|
|
|
|
пит |
ø |
ç |
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ê |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- e |
|
|
Lя |
|
|
|
|
|
|
|
|
|
|
ú |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ë |
|
|
|
|
|
|
|
|
|
|
|
|
|
è1 |
|
|
|
|
|
|
ø |
|
|
|
|
|
|
|
|
|
û |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
|
|
|
-TRя |
|
|
- gTRя ö |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
U |
|
|
|
ç |
|
+ e |
|
|
L |
|
|
- 2e |
|
|
|
L |
|
|
|
÷ |
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
i |
= |
пит |
è1 |
|
|
|
|
я |
|
|
|
|
|
|
|
я |
ø |
- |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 , |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
я max |
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
æ |
|
|
|
|
|
|
|
|
|
TRя |
ö |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
я |
|
|
|
|
|
|
ç |
|
|
|
|
|
|
|
- |
|
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
я |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è1 |
- e |
|
|
я |
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
|
|
|
|
|
-TRя |
|
|
|
|
|
|
-TRя gTRя ö |
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
ç |
|
- e |
|
L |
|
- 2e |
|
L |
|
|
|
|
|
|
|
L |
|
|
|
÷ |
|
|
|
|
E |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
пит |
|
è1 |
|
|
|
я |
|
|
|
|
|
я e |
|
я |
|
|
ø |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
i |
= - |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
0 |
. |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
|
|
|
|
|
TRя |
ö |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
я min |
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
я |
|
|
|
|
|
|
|
ç |
|
- |
|
|
|
|
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
я |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è1 |
- e |
|
|
|
я |
|
|
|
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Амплитуда пульсации тока якоря
(6.60)
(6.61)
(6.62)
(6.63)
|
æ |
|
- gTRя öæ |
|
-TRя gTRя ö |
|
||||||||||
|
ç |
- e |
|
L |
|
֍ |
|
|
|
L |
e |
L |
÷ |
|
||
Diя = iя max - iя min = |
2Uпит è1 |
|
я |
øè1 - e |
я |
я |
ø |
. (6.64) |
||||||||
R |
|
|
|
æ |
|
|
|
TRя |
ö |
|
|
|
||||
|
я |
|
ç |
|
|
- |
|
÷ |
|
|
|
|
||||
|
|
|
- e |
L |
|
|
|
|
|
|||||||
|
|
|
|
|
è1 |
|
я |
ø |
|
|
|
|
||||
183
Среднее значение тока якоря
|
|
æ |
|
E0 |
ö |
|
I я = |
Uпит ç |
2γ -1 - |
÷ |
|
||
|
ç |
|
÷. |
(6.65) |
||
Rя |
|
|||||
|
è |
|
Uпит ø |
|
||
Коэффициент пульсации выходного напряжения
|
|
|
|
|
|
|
|
æ |
|
- gTRя öæ |
|
-TRя gTRя ö |
|
||||||||
|
DU |
|
|
Di R |
ç |
- e |
|
L |
|
֍ |
- e |
|
|
L |
e |
L |
÷ |
|
|||
|
н |
|
2è1 |
|
я |
øè1 |
|
|
я |
я |
ø |
|
|||||||||
kп = |
|
|
= |
|
я я |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
. (6.66) |
|
U |
|
|
U |
|
|
|
æ |
|
|
TRя ö |
|
|
|
||||||||
|
пит |
пит |
|
|
- |
|
|
|
|
||||||||||||
|
|
|
|
|
ç |
L |
|
÷ |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
è1 |
- e |
я |
ø |
|
|
|
|
||||
Недостатком |
способа симметричного |
управления |
является |
|
изменение полярности выходного напряжения и высокий коэффициент |
||||
пульсаций, требующий |
повышенной |
установленной |
мощности |
|
выходных фильтров. |
|
|
|
|
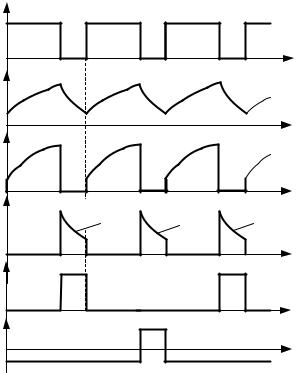
Несимметричный способ управления (рис. 6.14) характеризуется тем, что в одном плече моста силовые ключи работают в противофазе, например, K1 и K 4 , в другом плече один ключ постоянно замкнут ( K3 ),
а второй разомкнут ( K 2 ). Тогда на интервале 0Kt1 |
в случае |
активно- |
индуктивной нагрузки через ключи K1 и K3 |
протекает |
ток от |
источника питания, а в индуктивной нагрузке запасается энергия. На интервале t1 Kt2 ключ K1 закрыт, а открыт ключ K 4 , и под действием ЭДС самоиндукции в индуктивности нагрузки ток будет протекать через постоянно открытый ключ K3 и вентиль B4 , минуя цепь источника питания. Далее процесс повторяется.
Если преобразователь нагружен на двигатель постоянного тока, то на интервале 0Kt1 ток протекает от источника питания в якорную цепь
двигателя |
через |
замкнутые |
ключиK |
и |
K |
3 |
, |
преодолевая |
|||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
противоЭДС E0 . При этом в индуктивности якорной обмотки двигателя |
|||||||||||||
накапливается энергия. В точке t1 |
ключ K1 размыкается, а замыкается |
||||||||||||
ключ K 4 , и |
под действием |
ЭДС |
самоиндукции |
якорной |
обмотки |
ток |
|||||||
|
|
|
|
|
|
|
|
¢ |
|
|
|
|
|
будет протекать в прежнем направлении до точкиt2 , пока не иссякнет |
|||||||||||||
запасенная |
энергия. |
При |
|
этом |
ток |
протекает через |
ключK |
и |
|||||
вентиль B4 . |
|
¢ |
|
|
|
|
|
|
|
|
|
3 |
|
В точке |
ток якорной |
цепи |
|
меняет |
направление на |
||||||||
t2 |
|
||||||||||||
противоположное и на участке t2¢ - t2 будет протекать через ключ K 4 и
вентиль В3 под действием ЭДС якорной обмотки E0 . При этом энергия снова запасается в индуктивности якорной обмотки, и когда в точке t2 размыкается ключ K 4 , а замыкается снова ключ K1 , ток от источника
184
питания протекать |
не |
¢ |
, т. |
к. ЭДС самоиндукции |
сможет до точкиt |
||||
|
|
3 |
|
|
якорной обмотки, складываясь с ЭДСE0 , превышает напряжение |
||||
источника Uпит , и |
ток |
будет протекать через |
вентилиB1 и B3 через |
|
источник питания. При этом поток энергии направлен из электрической машины в источник питания.
|
Uк |
T |
|
|
|
|
||
|
|
|
tи |
|
tп |
tи |
|
|
|
iн |
t1 |
t2 |
|
t3 |
t4 t |
||
|
|
|
|
|
|
|||
iК -К |
3 |
|
|
|
|
t |
||
|
|
|
|
|
||||
1 |
|
|
|
|
|
|
|
|
iK3 -В4 |
|
|
|
|
t |
|||
|
|
|
|
|
||||
|
iн |
|
|
|
|
t |
||
|
|
|
|
|
|
|||
|
|
|
t¢ |
|
t¢ |
t¢ |
t¢ |
t |
iК -К |
|
1 |
|
2 |
3 |
4 |
|
|
3 |
|
|
|
|
|
|||
1 |
|
|
|
|
|
|
||
iK3 -В4 |
|
|
|
|
t |
|||
iK 4 -В3 |
|
|
|
|
t |
|||
|
|
|
|
|
||||
iB -В |
|
|
|
|
|
|
t |
|
1 |
3 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
t |
Рис. 6.14. Несимметричный способ управления реверсивным ИППТ
Из диаграммы рис. 6.14 следует, что при несимметричном способе управление имеет место неравномерная загрузка по току силовых элементов схемы.
Поскольку напряжение на нагрузке имеет вид однополярных импульсов, то коэффициент пульсаций выходного напряжения в этом случае определяется по(6.12), что значительно меньше, чем в случае
185
симметричного управления. Для осуществления реверса необходимо |
|||||||||||||||||
поменять |
местами |
законы |
управления ключами |
плечей |
моста: ключи |
||||||||||||
K 2 и K3 |
открывать и закрывать |
в |
противофазе; ключ |
K1 |
все |
время |
|||||||||||
закрыт, ключ K 4 |
все время открыт. |
|
|
|
|
|
|
|
|
|
|
||||||
При поочередном способе управления(рис. 6.15) |
ключи |
одной |
|||||||||||||||
диагонали моста все время разомкнуты(например, K 2 и K 4 ), а ключи |
|||||||||||||||||
второй диагонали K1 и K3 |
переключаются с частотой, вдвое меньшей |
||||||||||||||||
частоты импульсов выходного напряжения. |
|
|
|
|
|
|
|
|
|||||||||
|
|
Uн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t1 |
t2 |
|
t3 |
t4 |
t5 |
|
|
|
t |
|
|
|
||
|
|
iн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iК -К |
3 |
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iK-В |
iK |
3 |
-В |
4 |
iK -В |
2 |
iK |
3 |
-В |
t |
|
|
|
|||
|
|
|
|
|
|
1 |
|
|
4 |
|
|
|
|||||
|
UK1 |
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
UK3 |
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.15. Поочередный способ управления реверсивным ИППТ |
|
||||||||||||||||
Так, на участке 0Kt1 открыты ключи K1 и K3 и по нагрузке от источника питания протекает ток iн . В точке t1 выключается ключ K1 , а ключ K3 продолжает находиться в открытом состоянии до точкиt3 .
На интервале t1 Kt2 ток нагрузки под действием ЭДС самоиндукции протекает через ключ K3 и вентиль B4 . В точке t2 снова включается ключ K1 , и ток нагрузки снова протекает за счет напряжения источника
питания Uпит на интервале t2 Kt3 . В точке t3 размыкается ключ K3 |
, |
|
а ключ K1 продолжает находиться в открытом состоянии. Ток нагрузки |
||
под действием ЭДС самоиндукции протекает через вентильB |
и |
|
2 |
|
|
ключ K1 на интервале t3 Kt4 , а в точке t4 снова включается ключ K3 |
, |
|
186

и весь процесс повторяется. Выходное напряжение при этом способе управления имеет вид однополярных импульсов и его коэффициент пульсаций определяется по (6.12). Электромагнитные процессы в этом случае полностью идентичны рассмотренным в п. 4.1 при исследовании преобразователя с последовательным ключевым элементом, и поэтому расчетные выражения (6.4)–(6.11) могут быть использованы для выбора элементов силовой части при работе на активно-индуктивную нагрузку,
а (6.15)–(6.23) – при работе на двигатель постоянного тока. |
|
||||||
|
Для осуществления реверса при поочередном способе управления |
||||||
необходимо |
ключи K1 |
и K3 |
разомкнуть, |
а поочередно |
управлять |
||
ключами K 2 и K 4 . |
|
|
|
|
|
||
|
Из рассмотренных способов управления следует, что способы |
||||||
симметричного |
и |
несимметричного |
управления |
обеспечивают |
|||
двухсторонний обмен энергией между источником питания и нагрузкой, |
|||||||
а способ поочередного управления такой возможности не обеспечивает. |
|||||||
Во |
всех |
рассмотренных |
схемах |
импульсных |
преобразователей |
||
постоянного |
тока |
в |
качестве силовых |
ключей используются либо |
|||
полностью управляемые вентили(транзисторы, двухоперационные тиристоры), либо однооперационные тиристоры-вентили с неполной управляемостью, но снабженные специальными коммутационными узлами, обеспечивающими выключение тиристора в любой момент времени. Различные способы осуществления коммутации тиристоров
рассмотрены в п. 4.2. |
|
|
|
|
|
|
|
|
|
||
В зависимости |
от |
типа |
коммутационного |
,узлаприменяемого |
|||||||
в тиристорных |
преобразователях |
постоянного , |
различаюттока |
||||||||
одноступенчатую |
и |
|
двухступенчатую |
|
коммутацию. В |
схемах |
|||||
с одноступенчатой коммутацией |
используют |
принципы |
запирания |
||||||||
тиристоров |
при |
помощи |
последовательного |
или |
параллельного |
||||||
LС-контура (рис. 4.12, 4.13), и |
поэтому |
длительность |
импульсов |
||||||||
напряжения |
постоянна, |
определяется |
параметрами |
коммутирующего |
|||||||
контура и регулироваться не может. |
|
|
|
|
|
|
|
||||
Регулирование выходного напряжения в этих схемах может |
|||||||||||
осуществляться |
только |
частотно-импульсным |
способом( tи = const; |
||||||||
T = 1 = var ). В схемах с двухступенчатой коммутацией для запирания f
силового тиристора используется специальный коммутационный ключ (схемы рис. 4.14–4.16), и поэтому здесь могут применятся все три способа регулирования выходного напряжения.
187
Контрольные вопросы
1.Поясните принцип работы простейшего импульсного преобразователя постоянного тока (ИППТ).
2.Особенности работы ИППТ на двигательную нагрузку.
3.Поясните процесс рекуперативного торможения двигателя в нереверсивном ИППТ.
4.ИППТ повышающего типа. Принцип действия
5.Многофазные ИППТ. Особенности работы.
6.Особенности ИППТ с трансформаторной связью.
7.ИППТ повышающе-понижающего типа.
8.Схема Кука и ее основные особенности.
9.Схема преобразователя токаSEPIC и ее основные особенно-
сти.
10.ИППТ с трансформаторной развязкой входа и выхода. Прямоходовой преобразователь. Основные особенности.
11.Обратноходовой преобразователь. Основные особенности.
12.Объясните принцип симметричного управления реверсивным
ИППТ.
13.Объясните принцип несимметричного управления реверсивным ИППТ.
14.Объясните принцип поочередного управления реверсивным
ИППТ.
188
ГЛАВА 7. ИМПУЛЬСНЫЕ РЕГУЛЯТОРЫ ПЕРЕМЕННОГО ТОКА
Для |
|
регулирования |
и |
стабилизации |
переменного |
тока |
||||
используются различные типы регуляторов, стабилизаторов, |
среди |
|
||||||||
которых наибольшее распространение получили электромеханические, |
|
|||||||||
электромагнитные и магнитно-полупроводниковые. |
|
|
|
|
||||||
В |
рамках |
данного |
курса |
будет |
уделено |
внимание |
только |
|||
регуляторам |
магнитно-полупроводникового |
|
,типакак |
|
наиболее |
|
||||
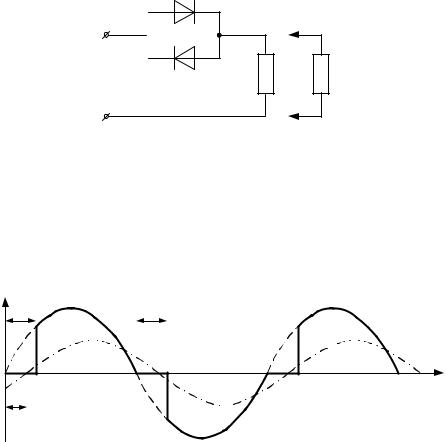
перспективным по целому ряду показателей. Простейшая |
схема |
|
||||||||
регулятора |
|
переменного |
тока |
представляет |
собой |
два -встречно |
||||
параллельных тиристора, включенных последовательно в цепь нагрузки |
|
|||||||||
(рис. 7.1). |
|
|
|
|
|
|
|
|
|
|
T1 

 T2
T2
Uc |
Rн Zн |
Рис. 7.1. Регулятор переменного тока на основе встречно-параллельных тиристоров
Тогда, открывая тиристоры T1 и T2 со сдвигом на уголa относительно точек естественной коммутации (0, π, 2π, и т. д.) (рис. 7.2), можно регулировать величину напряжения на нагрузке в пределах от нуля до максимального значения, определяемого напряжением питающей сети Uc .
Uн |
a |
|
a |
|
|
|
p |
2p |
|
|
j |
Uс |
Uн(1 ) |
q |
Рис. 7.2. Диаграмма работы регулятора переменного тока |
||||
|
|
при активной нагрузке |
|
|
Недостатком такого способа регулирования является плохая форма напряжения на нагрузке и фазовый сдвиг первой гармоники на угол j , определяемый углом управления a . Если нагрузка регулятора
189
чисто |
активная, |
то |
ток |
нагрузки |
в |
точности |
повторяет |
кривую |
|||||
напряжения (рис. 7.2). |
|
|
|
|
|
|
|
|
|
|
|
||
Если же нагрузка имеет активно-индуктивный характер, то ток |
|
||||||||||||
нагрузки |
изменяется |
по |
|
закону(2.82). |
При |
этом |
регулирование |
||||||
|
|
|
|
|
|
|
|
|
|
æ ω L |
ö |
|
|
оказывается возможным при условии: j < a < p , где f = arctg ç |
R н |
÷ . |
|
||||||||||
Это условие становится очевидным из рис. 7.3. |
è |
н |
ø |
|
|||||||||
|
|
|
|
||||||||||
|
Uн |
a |
|
i |
|
a |
|
l |
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
2p |
|
q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
|
|
|
j |
|
|
|
|
|
|
|
Рис. 7.3. Диаграмма работы регулятора переменного тока |
|
|
|||||||||||
|
|
при активно-индуктивной нагрузке |
|
|
|
|
|||||||
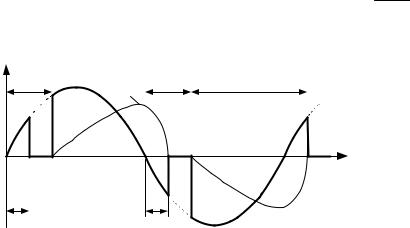
Ток нагрузки затягивается за точку естественной коммутации на угол φ и, следовательно, угол a не может быть меньше этой величины, так как очередной тиристор просто не сможет открыться. Если вместо тиристоров T1 и T2 использовать полностью управляемые ключи, либо снабдить эти тиристоры узлами принудительной коммутации, то тогда можно регулировать не только их момент включения, но и момент выключения, определяемый углом . βВ этом случае открываются дополнительные возможности регулятора, иллюстрируемые на рис. 7.4.
Вслучае а (рис. 7.4) a > 0 ; b = 0 . Очевидно, что первая гармоника напряжения будет иметь сдвиг в сторону отставания относительно -на пряжения питающей сети Uc .
Вслучае б (рис. 7.4) a = 0 ; b > 0 . Здесь фазовый сдвиг будет в сторону опережения Uc .
Вслучае в и г (рис. 7.4) если a = b , то фазовый сдвиг первой гармоники отсутствует. Если же a ¹ b, то фазовый сдвиг будет либо
отстающим, либо опережающим в зависимости от соотношения этих углов.
В случае д (рис. 7.4) можно реализовать способ широтноимпульсного регулирования.
190