

Вектора / Решение задач
.doc
Векторы ![]() лежат
в одной плоскости и образуют попарно
друг с другом углы 2π/3.
Разложить вектор
по
векторам
и
лежат
в одной плоскости и образуют попарно
друг с другом углы 2π/3.
Разложить вектор
по
векторам
и ![]() ,
,
Если
![]()
![]() .
.
Решение.

Найдем единичные векторы, направленные, как и векторы и
(см.
рисунок):
![]()
![]() или
или ![]()
![]() .
.
Тогда
![]() и
и ![]()
 .
.
Следовательно,
вектор ![]() -
единичный.
-
единичный.
Так
как ![]() ,
то угол между векторами
и
равен
180°,
,
то угол между векторами
и
равен
180°,
т. е. эти векторы противоположно направлены;
поэтому
![]()
![]() .
.
Задача 15.
Найти равнодействующую
двух сил ![]() и
и ![]() ,
модули которых равны
,
модули которых равны
F1 = 5, F2 = 7, угол между ними θ = 60°. Определить также углы α и β, образуемые равнодействующей с силами и .
Решение.

По формуле
![]()
![]() (теорема косинусов
для треугольника)
(теорема косинусов
для треугольника)
находим
![]()
![]()
Или
![]()
![]()
Углы ![]() и
и ![]() находим
из треугольника ABC,
пользуясь теоремой синусов
находим
из треугольника ABC,
пользуясь теоремой синусов
(![]()
![]() ):
):
![]()
![]()
![]()
Но
![]()
![]()
![]()
и тогда





![]()
![]()
![]()
![]()
![]()
Контроль: (![]()
![]() ).
).
Задача 16.
На точку действуют
три силы
,
и ![]() ,
проекции которых на оси прямоугольной
системы координат таковы:
,
проекции которых на оси прямоугольной
системы координат таковы:
|
|
|
|
X |
2 |
4 |
-5 |
Y |
1 |
-3 |
4 |
Z |
5 |
1 |
2 |
Найти величину и направление равнодействующей.
Решение.
Равнодействующая
![]()
![]() .
Обозначим проекции равнодействующей
через X, Y, Z,
а проекции сил
,
,
-
соответственно
через X1, Y1, Z1, X2, Y2, Z2 и X3, Y3, Z3.
.
Обозначим проекции равнодействующей
через X, Y, Z,
а проекции сил
,
,
-
соответственно
через X1, Y1, Z1, X2, Y2, Z2 и X3, Y3, Z3.
По формулам: проекция суммы векторов на какую-нибудь ось равна алгебраической сумме проекций этих векторов на ту же ось
ax = a1x + a2x + a3x + ... + anx; ay = a1y + a2y + a3y + ... + any; az = a1z + a2z + a3z + ... + anz.
Имеем
X = X1 + X2 + X3; X = 1, Y = Y1 + Y2 + Y3; Y = 2, Z = Z1 + Z2 + Z3; Z = 8.
По формуле длины вектора
![]()
![]()
величина
равнодействующая R будет
равна корню квадратному из суммы
квадратов проекций ![]() на
координатные оси:
на
координатные оси:
![]()
![]()
![]()
![]()
По формулам
![]()
![]()
![]()
![]()
![]()
![]()

находим направляющие косинусы равнодействующей
![]()
![]()
![]()
![]()
![]()
![]()
Задача 17.
Дана
сила ![]()
![]() и
точка ее приложения A(2,
-1, 3). Найти момент силы относительно
начала координат и углы, составляемые
им с координатными осями.
и
точка ее приложения A(2,
-1, 3). Найти момент силы относительно
начала координат и углы, составляемые
им с координатными осями.
Решение.
Момент
силы относительно начала координат
равен векторному произведению
радиуса-вектора точки A приложения
силы на силу ![]() ,
,
т.
е. ![]()
![]() .
.
Если вектор имеет начало в начале координат,
а его конец A имеет координаты x, y и z, то тогда его проекции на координатные оси равны координатам его конца:
ax = x; ay = y; az = z.
В этом случае вектор называется радиусом-вектором точки A.
Радиус-вектор
точки обозначается обыкновенно через
![]() (см.
рисунок):
(см.
рисунок):
![]()
![]()
![]()
а модуль радиуса-вектора точки A(x, y, z) вычисляется по формуле
![]()
![]()
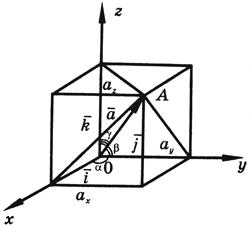
Проекция радиуса-вектора точки A на координатные оси равны координатам точки A :
rx = x = 2; ry = y = -1; rz = z = 3;
![]()
![]()
Проекции X, Y, Z силы на координатные оси нам также известны из условия задачи:
X = 3; Y = 4; Z = -2,
Выражение векторного
произведения
![]() через
проекции векторов
и
на
координатные оси прямоугольной системы
координат дается формулой
через
проекции векторов
и
на
координатные оси прямоугольной системы
координат дается формулой
и тогда для нашего случая
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Отсюда
mx = -10; my = 13; mz = 11;
и модуль момента
![]()
![]()
![]()
![]()
Направляющие
косинусы вектора ![]() равны
равны
![]()
![]()
![]()
![]()
![]()
а углы, составляемые моментом силы с координатными осями, следующие:
![]()
![]()
![]()
Контроль:
должно быть ![]()
![]()
![]() .
.
У
нас ![]()
![]()
![]() .
.