

ФУЛЛ_ЛЕК_Шилер
.pdfРасчетная схема динамической модели системы
|
|
|
|
|
|
|
«экипаж – путь». |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
Главный вид |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
ZКуз |
Куз |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
ОКуз |
|
YКуз |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
z |
z |
|
|
|
|
|
|
|
Y |
z |
|
|
|
|
|
|
|
Куз |
|
|
ZТ |
|
|
|
T |
|
|
||||
hКуз |
|
CКуз |
F |
|
|
|
|
|
|
CКуз |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
T |
|
FКуз |
|
|
|
||
|
|
|
|
|
Куз |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
CКузy |
|
ОT |
C y |
YT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Куз |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
CБz 1; Бz1 |
|
|
|
b1 |
|
|
|
b2 |
|
|
CБz 2 ; Бz2 |
|||||
hТ |
C |
y |
; |
y |
|
|
|
|
zкп |
|
|
|
|
|
y |
|
y |
|
Б1 |
Б1 |
|
|
|
|
αкп yкп |
|
|
|
CБ 2 |
; Б2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
z |
|
|
|
|
|
|
mкпп |
|
z2 |
|
|
|
r1 |
|
|
|
|
1 |
|
|
|
|
Окп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δ2 |
|
|
|
|
|||
|
|
|
η1 |
|
δ |
s1 |
αп |
zп |
|
|
η2 |
|
|
||||
|
|
|
|
|
1 |
|
s2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
hп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
Cy |
; y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
п |
|
П 2 |
П2 |
|
y |
|
y |
|
|
|
|
|
O |
|
yп |
|
|
|
|
|
|
|
CП1; П1 |
|
|
|
z |
z |
п |
z |
|
z |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
CП1; П1 |
|
|
|
CП 2 ; П2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
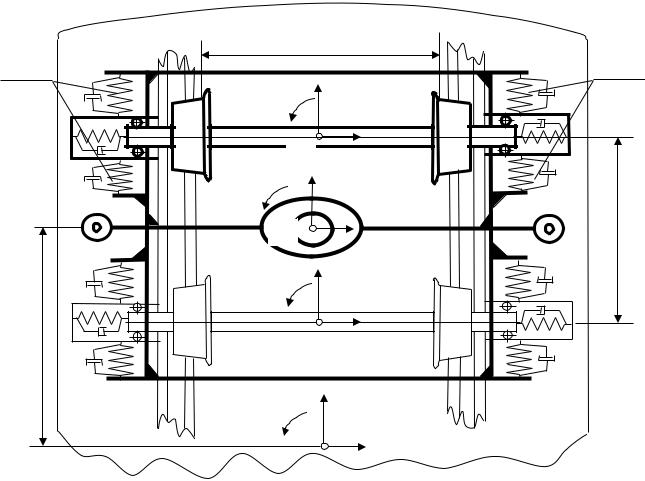
Расчетная схема динамической модели системы
«экипаж – путь».
Вид в плане.
C x |
; |
Б1 |
|
x |
|
Б1 |
|
u |
|
u |
К |
CБx |
2 ; |
|
|
|
Бx 2
Ψкп |
хкп1 |
1 |
|
Oкп |
yкп1 |
Ψт |
хт |
|
Oт |
b |
|
yт |
Ψкп |
хкп2 |
2 |
|
|
Oкп2 yп2 |
Ψк |
хк |
|
|
|
yк |
Oк
Дифференциальное уравнение движения относительно координаты Z – вертикальное движения.
z |
{2 (C z |
C z ) z |
|
А С z |
(( y y ) |
|
|
|
(z2 z1 ) |
y |
|
) 2 Г |
|
|
y |
|
|
|||||||||||||||||||||||||
КП |
КП |
|
КП |
КП |
КП |
|||||||||||||||||||||||||||||||||||||
КП |
|
|
|
|
П |
|
Б |
|
|
|
|
|
|
|
|
П |
|
|
1 |
2 |
|
|
|
|
S0 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z (2z |
КП |
B (z |
01 |
z |
02 |
z |
z |
2 |
)) 2 z z |
КП |
В [С z |
(z z |
2 |
z |
01 |
z |
02 |
) |
|
|
||||||||||||||||||||||
|
П |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
Б |
|
|
|
П |
1 |
|
|
|
|
|
|
|
||||||||||||||
C z |
( |
|
|
) ( |
z2 z1 |
) m |
|
( |
z1 |
z2 |
)]} / (m |
|
|
|
m |
|
) 0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
2 |
|
n |
|
|
КП |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
П |
1 |
|
|
|
|
2S0 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Дифференциальное уравнение движения относительно координаты α – боковая качка.
|
|
|
|
|
|
|
z |
|
|
2 |
|
|
|
z |
|
|
2 |
|
|
|
z |
(2S0 |
|
y |
|
|
|
y |
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
y |
|
2 |
|
|
|
y |
y |
КП |
||||||||||||
КП {(2CП |
|
S0 |
|
2СБ |
n0 |
А СП |
( 1 |
2 |
) 1 |
2 ) СП |
hКП |
(Q1П |
Q2 П )) |
||||||||||||||||||||||||||||||||||||||||||||||||||
[2 S |
|
C z |
А( 2 С z |
( y |
y ) С z |
(z z |
|
z |
|
|
|
z |
|
|
z2 z1 |
( y |
y )) |
|
|||||||||||||||||||||||||||||||||||||||||||||
0 |
2 |
01 |
02 |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
П |
|
|
1 |
|
2 |
|
|
|
|
П |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
S0 |
|
|
|
|
1 |
2 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
C y |
h |
|
|
|
|
(Q y |
Q y |
)] y |
|
|
|
|
Г С z ( |
z2 z1 |
) y |
2 |
|
А С z ( y |
y ) z |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
КП |
КП |
|
|
|
КП |
КП |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
П |
|
|
|
1П |
|
|
2 П |
|
|
|
|
|
|
|
П |
|
|
|
|
S0 |
|
|
|
|
|
|
|
|
|
|
|
|
П |
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 Г С z |
[ y |
КП |
z |
КП |
|
КП |
|
|
y 2 |
0,5 ( y y ) |
КП |
y |
КП |
] h2 |
|
[2 z |
2 z |
(4.6.33); |
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
КП |
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
КП |
|
|
Б |
|
|
|
П |
||||||||||||||||||||||
|
y |
|
|
|
|
y |
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
y |
|
y |
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
y |
|
|
|
|
y |
|
||||||||||
П |
(Q1П Q2 П )] КП |
П |
hКП (Q1П |
Q2 П ) yКП |
П |
hКП ( 2 |
Q2 П |
|
|
1 Q1П ) |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
2 S 2 F |
|
sign |
|
2 h |
|
|
|
К |
|
|
|
2 К h |
КП |
y |
|
|
|
|
|
2 K h2 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КП |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
КП |
КП |
|
|
|
|
|
|
|
КП |
|
|
|
|
|
|
|
|
|
|
КП |
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
0 |
|
|
|
КП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КП |
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
B [С В |
(s |
|
|
(z |
|
z z |
|
|
z |
|
) ( y |
|
y ) ( |
z1 z2 |
) (z |
|
z ) ( y y ) |
|
|
||||||||||||||||||||||||||||||||||||||||||||
0 |
|
2 |
02 |
01 |
|
|
2 |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
П |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
2 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z2 z1 |
( y |
2 |
y 2 ) z |
|
|
|
y z |
|
y С y h |
|
|
|
( y |
|
|
Q y |
y |
Q y |
) |
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
01 |
02 |
КП |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2s0 |
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
2 |
П |
|
|
|
2 |
|
|
|
|
2 П |
|
|
1 |
|
|
1П |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
J nX |
|
(z |
|
z |
|
))]} / (J |
X |
|
J X ) 0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
КП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
2s0 |
|
|
2 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дифференциальное уравнение движения относительно координаты Y – боковой относ.
|
|
|
y |
y |
|
|
y |
|
|
|
|
|
y |
|
|
C z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
yКП |
{С |
П |
(Q1П |
Q2П ) 2 C |
Б А |
[ |
|
|
|
|
|
|
(z1 |
z2 z01 |
z02 )] yКП |
А [CП |
(z1 z2 |
z01 z02 |
||||||||||||||||||||||||||
|
s0 |
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
( y |
y ) P С y |
h |
|
|
(Q y |
|
Q y |
|
|
)] |
|
|
А C z |
( |
z |
2 |
z |
1 |
( y |
y ) |
) z |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
(4.6.34); |
|||||||||||||||||||||||||||||
КП |
|
|
|
КП |
|
|
|
|
|
|
|
|
КП |
|
||||||||||||||||||||||||||||||
|
|
2 |
|
1 |
|
об |
|
|
|
П |
|
1П |
|
|
|
2П |
|
|
|
|
П |
|
|
|
|
|
s0 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
C z |
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
y |
y |
|
|
y |
|
|
|
y |
|
|
|
|
|
y |
y |
|
|
|
|
|
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Г (СП |
zКП |
КП |
|
|
|
|
|
zКП yКП ) |
(2 |
Б |
|
П (Q1П |
Q2П )) yКП П hКП (Q1П |
Q2П ) |
КП |
|||||||||||||||||||||||||||||
|
s0 |
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
y |
y |
y |
|
y |
|
|
|
y |
|
|
|
|
|
|
|
|
|
2 K |
|
|
|
|
|
|
|
|
|
|
z |
z2 z1 |
|
|
|
|
|
|
|||||||
|
П |
|
Q2П ) 2 |
K КП |
|
|
|
|
|
|
|
|
hКП |
|
|
|
|
П ( |
|
|
|
|
) (z1 |
z2 z01 z02 |
||||||||||||||||||||
( 1 |
Q1П 2 |
VКП |
( yКП |
КП ) B [C |
2s0 |
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
( y |
y )) |
|
CПz |
( y y ) (z |
|
z |
|
|
) С y |
y |
Q y |
С y |
y Q y |
]} / m |
|
|
0; |
|
|
|
||||||||||||||||||||||||
|
|
|
|
01 |
02 |
КП |
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
2 |
|
1 |
|
2s |
|
|
2 |
|
|
1 |
|
|
|
|
|
|
|
|
П |
|
1 |
1П |
|
|
П |
2 |
2П |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дифференциальное уравнение движения относительно координаты ψ – извилистого движения.
|
Х |
2 |
|
2 K b0 |
|
2 К b0 |
|
КП |
|
|
КП {2 Б |
b0 КП |
|
2 |
КП |
|
|
( yКП |
hКП КП ) |
||
VКП |
VКП |
|
||||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
(4.6.35). |
2 b2 |
C X |
В |
К b0 КП |
|
( y y )}/ J Z |
0 |
|
|
|
||||||
0 |
Б КП |
|
VКП |
2 1 |
КП |
|
|
|
|
|
|
|
|
|
|
Омский государственный университет путей сообщения (ОмГУПС, (ОмИИТ))
ООО «Гибкие транспортные системы»
Перспективная конструкция колесной пары вагонной тележки.
Ген. директор ООО «Гибкие транспортные системы», доцент ОмГУПС, к.т.н. Шилер Валерий Викторович
Омск 2013
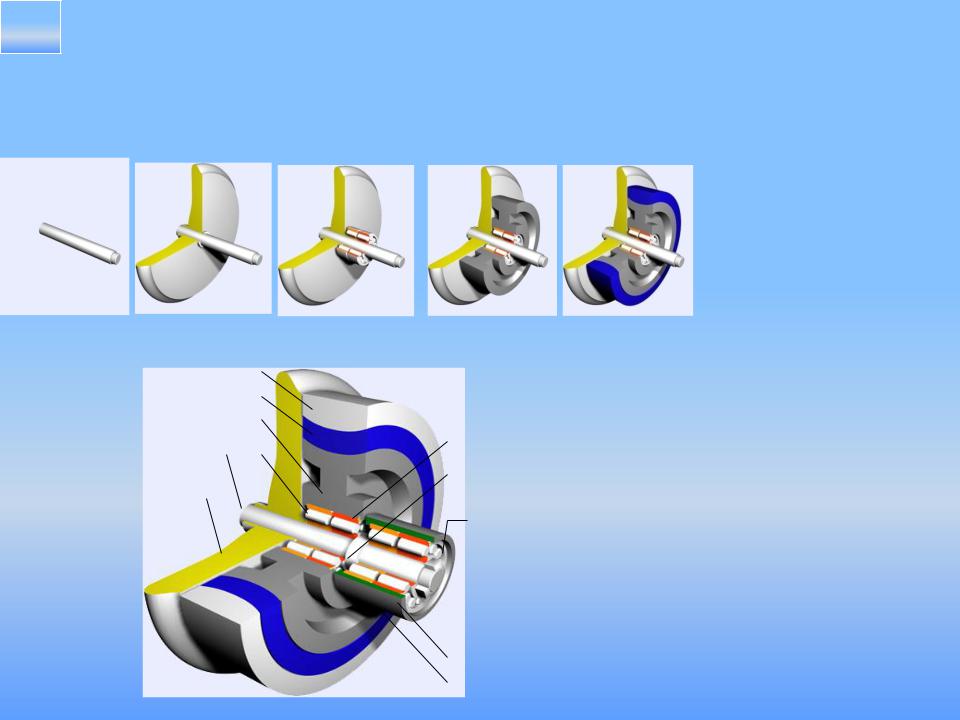
2Колесо с подрессоренным бандажом и независимым вращением поверхностей, контактирующих с головкой рельса.
6
5
4
1 3
2
7
8
12
 10 9
10 9
11
1.Ось колёсной пары
2.Дисковый гребень
3.Подшипники колеса
4.Диск колеса
5.Упругий элемент
6.Бандаж упругий
7.Кольцо стопорное
8.Втулка подшипников
промежуточная
9.Подшипники буксовые
10.Гайка стопорная
11.Корпус буксы
12.Крышка буксы
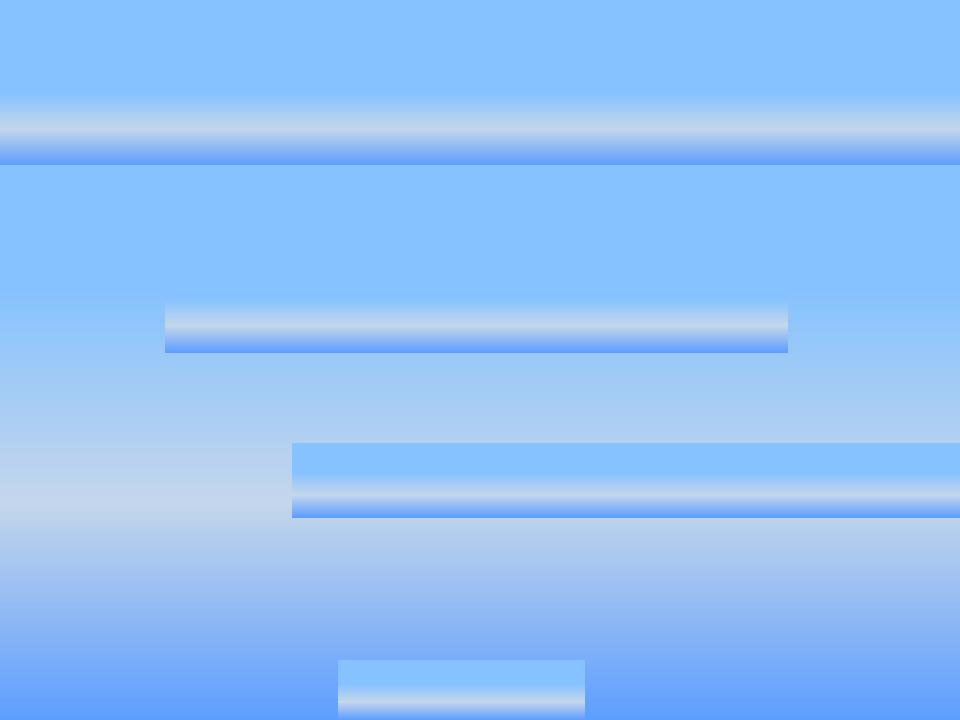
3 |
«Гибкое колесо» ж.-д. колесной пары |
3 1 11
|
5 |
7 |
|
|
|
|
13 |
|
|
10 |
4 |
|
|
|
8 |
|
12 |
|
|
2 6 9
Обозначения:
1.Бандаж упругий гибкого колеса
2.Втулка подшипников промежуточная
3.Гребень колеса дисковый.
4.Гайка осевая стопорная
5.Диск колеса
6.Корпус буксы
7.Крышка буксы
8.Ось колесной пары.
9.Подшипники буксовые
10.Кольцо запорное
11.Прокладка упругая
12.Болты крепления крышки буксы
13.Подшипники диска гибкого колеса
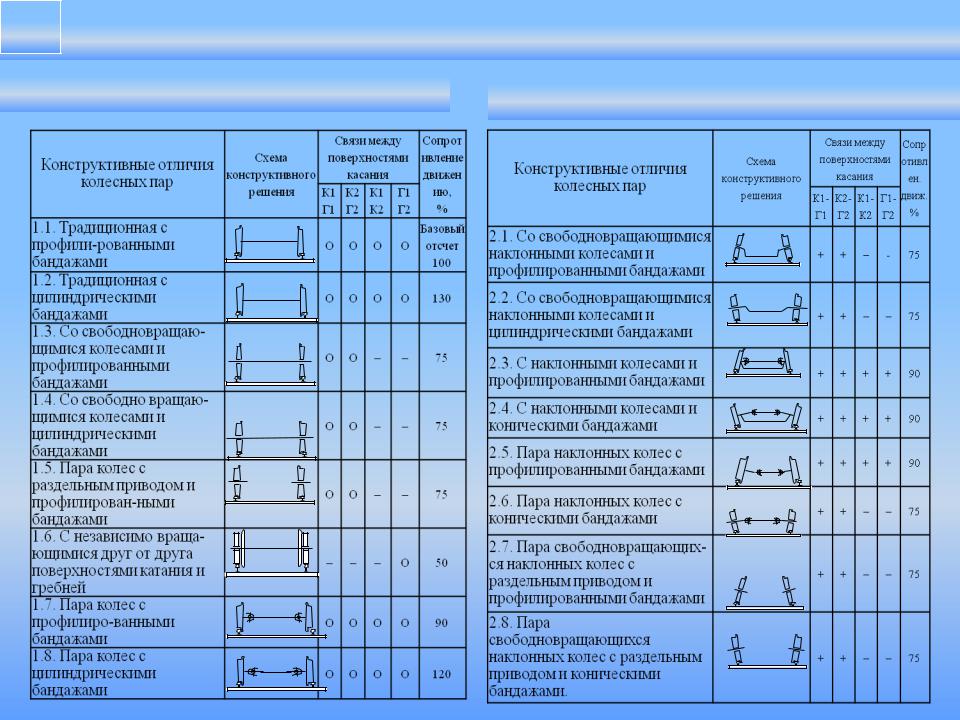
4 |
Классификация конструкций колесных пар |
|
Колесные |
пары с горизонтальным |
Колесные пары с наклонным положением |
|
|
|
положением осей вращения колес. |
осей вращения колес. |
|