

Kxp751v5RS
.pdfНа рис. 1.2, а показан начальный участок (n = 5000 дискрет) реализации корреляционной последовательности ξ(n) общим объемом выборки 200 000
дискрет с заданной корреляционной функцией R(τ) = σ2 sin w0τ и парамет- w0τ
рами в (1.1), (1.2): γ0 = π /100 , р = 100; на рис. 1.2, б и в соответственно представлены экспериментально определенные корреляционная функция R(n)
игистограмма распределения N(ξi) полученной последовательности.
Влабораторной работе необходимо реализовать один из моделирующих алгоритмов, представленных в приложении, по заданию преподавателя.
Лабораторная работа 2.
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК РАВНОМЕРНОЙ ВРЕМЕННОЙ ДИСКРЕТИЗАЦИИ СИГНАЛОВ
Цель работы – изучение характеристик равномерной временной дискретизации (РВД) сигналов c использованием среды интерактивного программирования MatLab.
Задание
1.Получить у преподавателя исходные требования для выполнения экспериментов по исследованию основных характеристик равномерной дискретизации.
2.Сформировать в структуре пакета прикладных программ MatLab основные блоки программной реализации имитационных исследований характеристик адаптивной дискретизации в соответствии с полученными исходными требованиями (п. 1):
−генератор измерительных сигналов,
−блок равномерной временной дискретизации,
−анализаторы характеристик дискретизации, предназначенные для оценки гистограммы распределения максимальных погрешностей аппроксимации на интервалах дискретизации и числа дискретных отсчетов за сеанс проведения эксперимента.
При программной реализации разрабатываемых блоков предусмот-
реть возможность вывода на экран дисплея фрагментов записи измерительных сигналов с указанием дискретных отсчетов и результатов анализа в виде графиков и числовых значений искомых характеристик.
11
3.Провести проверку работоспособности разработанных блоков на тестовых сигналах по указанию преподавателя (синусоидальных, линейно-изменяю- щихся, экспоненциальных и т. п.).
4.Провести экспериментальные исследования равномерной временной дискретизации сигналов при условиях, определенных в п. 1 (объем выборки при исследованиях указывается преподавателем):
4.1.Получить на экране дисплея график изображения фрагмента исходно-
го сигнала с указанием на нем дискретных отсчетов при равномерной дискретизации. Качественно оценить результаты эксперимента. Гра-
фик привести в отчете.
4.2.Экспериментально определить плотности распределения (гистограм-
мы распределения) максимальных погрешностей аппроксимации на интервалах дискретизации при равномерной временной дискретиза-
ции исследуемых сигналов.
4.3.Экспериментально определить число дискретных отсчетов при равно-
мерной временной дискретизации исследуемых сигналов.
5.Провести анализ результатов исследования равномерной дискретизации сигналов:
5.1.Построить графики экспериментальных и теоретических плотностей распределения (гистограмм распределения) максимальных погреш-
ностей аппроксимации на интервалах дискретизации при равномер-
ной временной дискретизации исследуемых сигналов.
5.2.Сделать выводы о свойствах равномерной дискретизации по точности представления сигналов и необходимому числу дискретных отсчетов.
Общие сведения и порядок выполнения работы
При равномерной дискретизации постоянный шаг t = const дискретизации выбирается из потенциально возможного экстремального изменения сигнала и допустимой погрешности εд представления (аппроксимации) сиг-
нала на интервалах дискретизации [1]. Вследствие такого выбора интервала дискретизации в подавляющем числе отсчетов равномерной дискретизации погрешность представления сигнала на интервалах будет меньше и даже су-
щественно меньше допустимого уровня εд. Такая процедура дискретизации сигнала приводит к значительной избыточности отсчетов при заданной точности представления сигнала.
12

В зависимости от модели сигнала можно выделить различные подходы к определению шага РВД. В качестве математической модели сигнала рас-
сматривается некоторая функция y(t) , непрерывная на всем интервале наблюдения и имеющая ограниченное число (n + 1) конечных и непрерывных производных.
Сигнал представлен множеством дискретных значений { y j(ti)} с посто-
янным шагом t .
Вобщем виде частота РВД зависит:
–от вида восстановления сигнала,
–критерия приближения.
При представлении сигнала между дискретными отсчетами полиномами n-го порядка в качестве аппроксимирующей функции y * (t) используются экстраполяционный полином Тейлора или интерполяционные полиномы Лагранжа и Ньютона. При этом возникает погрешность представления сигнала
ε(t) = y * (t) − y(t).
Для экстраполяционного полинома Тейлора оценка сверху погрешности
ε(t) имеет вид [1]
εm = max |
|
ε(t) |
|
≤ |
M n+1 |
|
|
(t |
− ti −1) |
n+1 |
|
, |
(2.1) |
|||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||
|
|
(n + 1)! |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
max |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
для интерполяционного полинома Лагранжа – |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
εm = max |
|
ε(t) |
|
≤ |
M n+1 |
|
|
|
∏(t − tk ) |
|
, |
|
(2.2) |
|||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||
|
|
(n + 1)! |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k =0 |
|
|
max |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
для интерполяционного полинома Ньютона – |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
M n+1 |
|
|
|
|
|
||||||||||||||||||||
εm = max |
|
ε(t) |
|
≤ |
|
t n+1 |
∏(v − k ) |
|
. |
(2.3) |
||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||
|
|
(n + 1)! |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k =0 |
|
|
|
max |
|
|||||||||||
Здесь t [ti −1, ti ], i = 1, 2, ... ; M n+1 – |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
модуль-максимум (n + 1) -й произ- |
||||||||||||||||||||||||||||||
водной в рассматриваемом интервале аппроксимации; |
|
tk – |
узлы интерполя- |
|||||||||||||||||||||||||||
ции; t – шаг дискретизации; v = t t – |
безразмерный коэффициент. |
При |
||||||||||||||||||||||||||||
равноотстоящих узлах интерполяции оценку (2.2) можно тождественно пред-
ставить в форме (2.3). Учитывая, что разность (t − ti−1 ) в (2.1) достигает мак-
симума при t = ti , а разность ti − ti −1 = t , можно упростить выражения для оценки максимальных погрешностей на интервалах дискретизации:
13
для экстраполяционных полиномов
εm ≤ |
M n+1 |
|
t |
n+1 |
, |
(2.4) |
(n + 1)! |
|
|||||
|
|
|
|
|
||
для интерполяционных полиномов
|
|
|
|
|
|
ε |
m |
≤ |
M n+1 |
С |
n |
t n+1, |
|
(2.5) |
|||||||
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
(n + 1)! |
|
|
|
|
|
|
|
||||||
где Cn = |
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
∏(v − k ) |
|
|
. Некоторые значения коэффициентов Cn приведены в |
|||||||||||||||||
|
|
k =0 |
|
max |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
табл. 2.1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
n |
|
0 |
|
|
1 |
|
|
|
2 |
|
|
3 |
|
4 |
|
|||
|
|
|
Cn |
|
|
1/ 2 |
|
|
1/ 4 |
|
|
|
|
|
|
|
1 |
|
3.6 |
|
|
|
|
|
|
|
|
|
|
2 |
3 9 |
|
|
|
|||||||||
При заданной допустимой погрешности εд аппроксимации шаг РВД определяется формулами:
для экстраполяционных полиномов
t = n+1 |
|
εд(n + 1)! |
|
, |
(2.6) |
|
|||||
|
|
M n+1 |
|
||
для интерполяционных полиномов
t = n+1 |
|
εд(n + 1)! |
|
. |
(2.7) |
|
|||||
|
|
Сn M n+1 |
|
||
Втабл. 2.2 приведены формулы (2.4)–(2.7) для широко используемых алгоритмов аппроксимации сигналов.
Вприведенных формулах в том или ином виде присутствуют оценки модуля (n + 1)-й производной сигналов. Для детерминированных сигналов такие оценки находятся обычным дифференцированием заданной модели сигнала.
|
|
|
|
|
|
|
|
|
|
|
Таблица 2.2 |
||||||
|
Погрешность |
Шаг дискретизации |
Частота дискретизации |
||||||||||||||
Вид аппроксимации |
при шаге |
t |
при заданной εд |
при заданной εд |
|||||||||||||
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Нулевая экстраполяция |
εm = M1 |
t |
t = |
|
εд |
|
|
f = |
M1 |
|
|
|
|||||
|
|
|
|
|
εд |
||||||||||||
M1 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
t 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Линейная интерполяция |
εm = |
M 2 |
t = |
|
8εд |
|
f = |
|
|
M 2 |
|
||||||
|
|
8 |
|
|
|
|
M 2 |
|
|
|
8εд |
||||||
14
Для экспериментального исследования РВД случайных сигналов в лабораторной работе используются сигналы с нормальным распределением и различными корреляционными функциями ([4], [5]), например
R(τ) = σ2x |
sin ωсрτ |
, R(τ) = σ2xe−ω02 τ2 , |
R(τ) = σ2 |
1 |
|
. |
|||||
|
|
|
|||||||||
|
ωсрτ |
|
|
|
|
|
x 1 + ω2 |
τ2 |
|||
|
|
|
|
|
|
|
|
|
0 |
|
|
При заданной R(τ) определяются корреляционная функция (n + 1)-й |
|||||||||||
производной сигнала [1], [4] |
|
|
|
|
|
|
|
|
|
||
|
Rx(n +1) (τ) = (−1) |
(n+1) d 2(n+1) R(τ) |
|
|
|
||||||
|
|
|
|
d |
2(n+1) |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
и дисперсия соответствующей производной |
|
|
|
|
|
||||||
|
σ2[x(n+1) ] = R |
x |
(n +1) (τ = 0) . |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Для упрощения вычислений некоторые корреляционные функции удобно |
|||||||||||
представить в виде ряда Тейлора (Маклорена). |
|
|
|
|
|
||||||
Поскольку закон распределения производных также остается нормаль- |
|||||||||||
ным максимальное значение производных |
ограничивается |
значениями |
|||||||||
M n+1 = 2σ[x(n+1) ] или M n+1 = 3σ[x(n+1) ] в зависимости от принятой (ука-
занной преподавателем) доверительной вероятности.
Лабораторная работа 3.
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК АДАПТИВНОЙ ВРЕМЕННОЙ ДИСКРЕТИЗАЦИИ СИГНАЛОВ
Цель работы – ознакомление с процедурой адаптивной временной дискретизации сигналов и исследование ее метрологических характеристик с использованием среды интерактивного программирования MatLab.
Задание
1.Получить у преподавателя исходные требования для выполнения экспериментов по исследованию основных характеристик адаптивной дискретизации.
2.Сформировать в структуре пакета прикладных программ MatLab основные блоки программной реализации имитационных исследований характеристик адаптивной дискретизации в соответствии с полученными исходными требованиями (п. 1):
−генератор измерительных сигналов,
−блок равномерной временной дискретизации,
15
−блок адаптивной временной дискретизации,
−анализаторы характеристик дискретизации, предназначенные для оценки гистограммы распределения максимальных на интервалах погрешностей аппроксимации, гистограммы распределения временных интервалов дискретизации, числа дискретных отсчетов за сеанс проведения эксперимента.
При программной реализации разрабатываемых блоков предусмотреть
возможность вывода на экран дисплея фрагментов записи измерительных сигналов с указанием дискретных отсчетов и результатов анализа в виде графиков и числовых значений искомых характеристик.
3.Провести проверку работоспособности разработанных блоков на тестовых сигналах по указанию преподавателя (синусоидальных, линейно-изменяю- щихся, экспоненциальных и т. п.).
4.Провести экспериментальные исследования адаптивной временной дискретизации сигналов при условиях, определенных в п. 1. Объем выборки при исследованиях указывается преподавателем:
4.1.Получить на экране дисплея два графика изображения фрагмента исходного сигнала с указанием на одном из них дискретных отсчетов при адаптивной дискретизации сигнала, а на другом – при равномерной дискретизации. Качественно оценить результаты эксперимента. Экспериментально определить плотности распределения (гистограммы распределения) максимальных погрешностей аппроксимации на интервалах дискретизации при адаптивной и равномерной временной дискретизации исследуемых сигналов.
4.2.Экспериментально определить число дискретных отсчетов при адаптивной и равномерной временной дискретизации исследуемых сигналов. Оценить коэффициенты сжатия сигналов при представлении их адаптивными отсчетами.
4.3.Экспериментально определить плотность распределения (гистограмму распределения) интервалов адаптивной дискретизации исследуемых сигналов.
5.Провести анализ результатов исследования адаптивной дискретизации сигналов:
5.1.Построить графики экспериментальных и теоретических плотностей распределения (гистограмм распределения) максимальных погрешностей
16
аппроксимации на интервалах дискретизации при адаптивной и равномерной временной дискретизации исследуемых сигналов.
5.2.Построить графики экспериментальных и теоретических плотностей распределения (гистограмм распределения) интервалов адаптивной дискретизации исследуемых сигналов.
5.3.Сравнить теоретические и экспериментально определенные коэффициенты сжатия для исследуемых сигналов.
5.4.Сделать выводы о свойствах адаптивной дискретизации по точности представления сигналов и необходимому числу дискретных отсчетов (в сравнении с равномерной временной дискретизацией).
Общие сведения и порядок выполнения работы
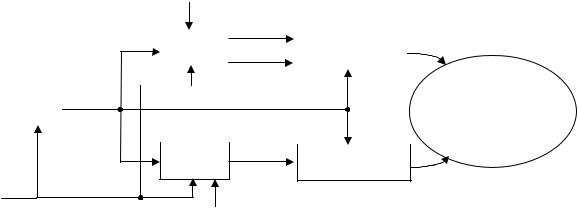
Исследование адаптивной временной дискретизации сигналов проводится на имитационной модели, реализуемой в структуре ППП Matlab. На рис. 3.1 представлена функциональная схема имитационной модели эксперимента, где ГС – генератор сигналов, включающий генераторы тестовых и измерительных сигналов; АВД, РВД – блоки, реализующие соответственно адаптивную и равномерную временную дискретизацию сигналов; блоки «Анализ АВД» и «Анализ АВД» предназначены для оценки искомых характеристик в соответствии с заданием, см. п. 2.
εд
|
|
|
|
|
x(tа j) |
|
|
|
|
|
|
|
АВД |
tа j |
Анализ АВД |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сравнительный |
||
|
x(ti) |
|
|
|
|
|
|
|
|
ГС |
|
||||||||
|
|
|
|
|
|
|
|
анализ |
|
|
|
|
|
|
x(tрk) |
|
|
|
АВД и РВД |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
РВД |
|
|
|
|
||
|
|
|
Анализ РВД |
||||||
|
|
|
|
||||||
ti
tр
Рис. 3.1. Функциональная схема имитационной модели эксперимента
Сравнительный анализ предполагает как программную реализацию оценки характеристик АВД и РВД, так и аналитическое и качественное сравнение свойств исследуемых видов дискретизации.
Лабораторную работу необходимо выполнять в следующем порядке:
1) разработать программное обеспечение для реализации отдельных функциональных блоков и всей программы в целом;
17
2)провести тестовых испытаний по проверке работоспособности отдельных блоков;
3)провести экспериментальные исследования характеристик адаптивной и равномерной дискретизации сигналов при одинаковых входных сигналах;
4)проанализировать полученные результаты имитационного моделирования.
Вопросы теории адаптивной временной дискретизации приведены в [1], [2], поэтому в настоящих методических указаниях эти вопросы не рассматриваются.
При разработке программного обеспечения необходимо воспользоваться результатами выполненных лаб. раб. 1, 2; здесь остановимся лишь на алго-
ритмах работы адаптивных временных дискретизаторов.
При адаптивной дискретизации отсчет сигнала осуществляется в момент времени, когда погрешность аппроксимации сигнала в принятом базисе и при принятом критерии приближения на интервале дискретизации достигает определенного (наперед заданного) уровня εд. Это приводит к значительному сокращению числа отсчетов сигнала по сравнению с равномерной дискретизацией при сохранении заданной точности представления сигналов.
В этом смысле адаптивная дискретизация является методом сжатия данных.
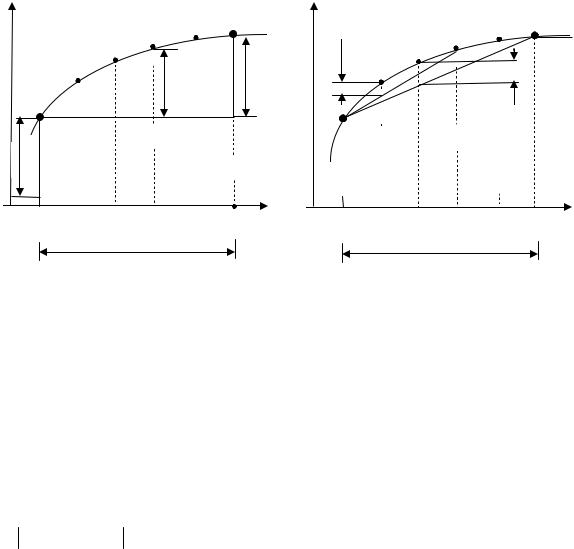
Примеры реализации алгоритмов работы блоков АВД представлены на рис. 3.2 при нулевой экстраполяции (а) и линейной интерполяции (б), где ti –
временные такты работы имитационной модели, соответствующие считыванию очередного значения входного сигнала (см. также рис. 3.1); x(t) –
входной сигнал, x(ti) – текущие дискретные значения представления входного сигнала x(t) (на рисунках представлены жирными точками); x*(t) –
аппроксимирующий (восстанавливающий) сигнал, формируемый по дискретным адаптивным отсчетам входного сигнала; x*(tаj) – дискретные значения аппроксимирующего сигнала в момент tаj времени j-го адаптивного отсчета (на рисунках представлены крупными точками); ε(ti) –
текущее значение погрешности аппроксимации; εд – допустимое
(установленное) значение погрешности аппроксимации на интервалах адаптивной дискретизации; tаj – j-й интервал адаптивной дискретизации.
18
Рассмотрим алгоритмы формирования адаптивных отсчетов и аппрок-
симирующего сигнала на приведенных примерах (рис. 3.2).
x(t), x*(t)
εд
ti– 3 tаj
|
|
|
x*(tа(j+1)) |
x(t), |
|
||||||||||
|
|
|
x*(t) |
|
|||||||||||
x(t) |
x(ti) |
|
|
|
|
|
|
ε(ti– 2) |
x(ti) |
||||||
|
|||||||||||||||
|
|
|
εд |
|
|
|
|
|
|
|
x(t) |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
ε(ti) |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
x*(t) |
|
|
|
|
|
|
|
x*(t) |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
x*(t |
аj) |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ti– 2 |
ti– 1 |
ti |
. |
ti+2 |
t |
|
ti – 3 |
ti– 2 |
ti– 1 ti |
|
|
tаj |
|
tа(j+ |
1) |
|
tаj |
|
tаj |
|
|
|
|||||||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|||
|
|
а |
|
|
|
|
|
|
б |
Рис. 3.2. Примеры реализации алгоритмов АВД
x*(tа(j+1))
εд
. ti+2 t
tа(j+1)
Нулевая экстраполяция. Пусть в момент времени ti– 3 сформирован адап-
тивный отсчет x*(tаj), причем x*(tаj) = x(ti– 3) (отметим, что индексация мо-
ментов времени для x*(t) и x(t) разная). На основании адаптивного отсчета на последующие моменты времени формируется экстаполирующий (предсказы-
вающий) полином нулевого порядка – x*(t) = x*(tаj). В каждый последующий момент времени определяется текущая погрешность нулевой экстраполяции
ε(ti ) = x * (ti ) − x(ti ) , на рис. 3.2 – в моменты времени ti– 2, ti– 1, ti, и т. д; для иллюстрации эта погрешность на рисунке показана в момент времени ti. Если текущая погрешность меньше допустимой (ε(ti) < εд), то отсчет сигнала не производится. Если ε(ti) ≥ εд, то формируется очередной адаптивный отсчет
(на рис. 3.2 – отчет x*(tа(j+1))), равный значению входного сигнала x(ti+2) в
тот же момент времени, x*(tа(j+1)) = x(ti+2). Таким образом, сформирован интервал tаj адаптивной дискретизации, внутри которого погрешность ну-
левой экстраполяции не превышает заданный уровень εд (с точностью дис-
кретного представления входного сигнала).
19
Для каждого следующего интервала процедура адаптивной дискретизации полностью повторяется, при этом за исходный отсчет принимается найденный в предыдущем интервале, для рассмотренного примера –
x*(tа(j+1)) для (j + 1)-го интервала, и т. д.
Линейная интерполяция. На каждом такте опроса входного сигнала начиная со 2-го такта от адаптивного отсчета (на рис. 3.2, б – с такта ti– 1)
формируется интерполяционный полином 1-го порядка и оценивается текущая погрешность интерполяции. Для иллюстрации на рисунке штрихами изображен такой полином x*(t) для момента времени ti
|
|
|
x(t ) − x * (t |
) |
(t − t |
) . |
|
|
|||||
|
|
x*(t) = |
i |
à j |
|
|
|
||||||
|
|
|
|
|
|||||||||
|
|
|
ti − ti−3 |
|
|
|
i−3 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
На интервале интерполяции в каждой точке отсчета определяются по- |
|||||||||||||
грешности интерполяции; для приведенного примера – |
|||||||||||||
ε(ti −2 ) = |
|
x * (ti −2 ) − x(ti −2 ) |
|
, ε(ti −1) = |
|
x * (ti −1) − x(ti −1) |
|
, |
|||||
|
|
|
|
||||||||||
и находится максимальная их |
них: |
εmax(ti) = max{ε(ti−2), ε(ti−1)} . Пусть |
|||||||||||
εmax (ti ) = ε(ti −1) , как на рисунке. Проверяется условие: если εmax (ti ) < εд, то отсчет сигнала не берется и продолжается процедура оценки текущей погрешности интерполяции для следующего момента времени (в приведенном примере для ti +1, ), и т. д. Если, как показано на рис. 3.2, б, в момент времени
ti + 2 выполняется условие εmax (ti ) > εд , то берется очередной адаптивный
отсчет сигнала x*(tа(j+1)) = x(ti+2). Таким образом, сформирован интервал tаj
адаптивной дискретизации, внутри которого погрешность линейной интер-
поляции не превышает заданный уровень εд (с точностью дискретного пред-
ставления входного сигнала). Для каждого следующего интервала процедура адаптивной дискретизации полностью повторяется.
20