

ПИД-регулятор
.docxФедеральное государственное автономное образовательное учреждение
высшего образования
«ТЮМЕНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
Физико-технический институт
Кафедра Механики многофазных систем
Домашнее задание по дисциплине «Экспериментальные методы исследований»
Тема: «ПИД-регулятор»
Тюмень
2019
Выполнила:
студентка 2 курса Айткужинова З.Ф.

ПИД-регулятор
 ПИД-регулятор
относится к регуляторам
непрерывного типа.
Аббревиатура «ПИД» расшифровывается
как «пропорционально-интегрально-дифференциальный»
(регулятор) — эти три слова полностью
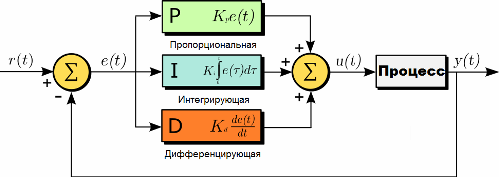
описывают принцип его действия. Общая
структурная схема управления выглядит
так:
ПИД-регулятор
относится к регуляторам
непрерывного типа.
Аббревиатура «ПИД» расшифровывается
как «пропорционально-интегрально-дифференциальный»
(регулятор) — эти три слова полностью
описывают принцип его действия. Общая
структурная схема управления выглядит
так:
На вход регулятора подаётся измеренная датчиком физическая величина (температура, влажность и т.д.), регулятор в соответствии со своим алгоритмом (реализующим функцию преобразования) выдаёт управляющее воздействие. Это вызывает изменение регулируемой величины (например, температуры или влажности). На следующем шаге регулятор снова делает замер регулируемого параметра и сравнивает эту величину с заданной, вычисляя ошибку регулирования. Новое управляющее воздействие формируется с учётом ошибки регулирования на каждом шаге. Значение величины, которое нужно поддерживать, задаётся пользователем.
 Функция
преобразования ПИД-регулятора выглядит
следующим образом:
Функция
преобразования ПИД-регулятора выглядит
следующим образом:
где E — ошибка регулирования (разница между заданным значением регулируемой величины и фактическим)
В этой формуле есть три составляющие: интегральная пропорциональная и дифференциальная. Каждая из них имеет соответствующий коэффициент (Кn, Кu, Кd). Чем больше коэффициент, тем больший вклад данная составляющая вносит в работу регулятора. Теперь разберёмся за что отвечает каждая из них.
Интегральная
Интегральная составляющая необходима, чтобы учитывать предыдущий опыт работы регулятора и делать управление всё точнее и точнее со временем. Как известно, интеграл — это сумма. Регулятор суммирует все предыдущие значения ошибки регулирования и делает на них поправку. Как только система выйдет на заданный режим (например, достигнет заданной температуры) ошибка регулирования будет близка к нулю и интегральная часть со временем будет всё меньше влиять на работу регулятора. Говоря простым языком, интегральная составляющая стремиться исправить ошибки регулирования за предыдущий период.
Дифференциальная
Эта составляющая берёт производную от измеряемой величины. Физический смысл производной - это скорость изменения физической величины. Например, чем быстрее растёт (или падает) температура в системе, тем больше будет соответствующая производная. Дифференциальная составляющая позволяет регулятору по-разному реагировать на резкие и плавные изменения регулируемой величины в системе, тем самым избегая «раскачивания» этой величины.
Принцип действия ПИД-регулятора
Интегральный сильфон и переменное ограничение позволяет обеспечить интегральное регулирование. Два дифференциальных сильфона и другое переменное ограничение дает возможность регулятору осуществлять дифференциальное регулирование.
Если выход увеличивается, то входной сильфон и нижний дифференциальный сильфон расширяются. Верхний дифференциальный сильфон расширяется позднее из-за переменного ограничения. Балансир поворачивается, и выход немедленно повышается.
 Когда
входной сигнал полностью перетечет в
верхний дифференциальный сильфон, этот
сильфон приложит силу, которая уничтожит
силу, приложенную нижним дифференциальным
сильфоном. На этой точке дифференциальное
регулирование прекращается. В то же
время, когда это происходит, сильфон
обратной связи расширяется в результате
изменения выхода. Изменение выхода
подается на интегральный сильфон,
который вызывает силу, стремящуюся
удержать клапан ближе к соплу. Это
действие держит выход на высоком уровне
в течение времени, когда переменная
процесса не равна установке. Выход будет
продолжать увеличиваться до тех пор,
пока переменная процесса не вернется
в заданному значению установки.
Когда
входной сигнал полностью перетечет в
верхний дифференциальный сильфон, этот
сильфон приложит силу, которая уничтожит
силу, приложенную нижним дифференциальным
сильфоном. На этой точке дифференциальное
регулирование прекращается. В то же
время, когда это происходит, сильфон
обратной связи расширяется в результате
изменения выхода. Изменение выхода
подается на интегральный сильфон,
который вызывает силу, стремящуюся
удержать клапан ближе к соплу. Это
действие держит выход на высоком уровне
в течение времени, когда переменная
процесса не равна установке. Выход будет
продолжать увеличиваться до тех пор,
пока переменная процесса не вернется
в заданному значению установки.
Основные принципы
Все
виды автоматической настройки используют
три принципиально важных этапа:
идентификация, расчёт параметров
регулятора, настройка регулятора. Часто
конечный этап включает этап подстройки
(заключительная оптимизация настройки).
Оптимизация настройки необходима в
связи с тем, что методы расчёта параметров
регулятора по формулам не учитывают
нелинейности объекта, в частности,
всегда присутствующую нелинейность
типа «ограничение», а идентификация
параметров объекта выполняется с
некоторой погрешностью. Подстройка
регулятора может быть поисковой (без
идентификации объекта, путём поиска
оптимальных параметров) и беспоисковой
(с идентификацией). Поисковая идентификация
базируется обычно на правилах (см. раздел
«Ручная настройки ПИД‑регулятора,
основанная на правилах») или на
итерационных алгоритмах поиска минимума
критериальной функции. Наиболее
распространён поиск оптимальных
параметров с помощью градиентного
метода: находят производные от
критериальной функции по пара‑ метрам
ПИД‑регулятора, которые являются
компонентами век‑ тора градиента, а
далее производится изменение параметров
в соответствии с направлением градиента.
Важно подчеркнуть, что несмотря на
наличие автоматической подстройки,
контроллер может не дать требуемого
качества регулирования по причинам, не
зависящим от качества заложенных в него
алгоритмов. Например, объект управления
может быть плохо спроектирован (зависимые
контуры регулирования, большая задержка,
высокий порядок объекта); объект может
быть нелинейным; датчики могут быть
расположены не в том месте, где нужно,
и иметь плохой контакт с объектом,
уровень помех в канале измерения может
быть недопустимо большим; разрешающая
способность датчика может быть
недостаточно высокой; источник входного
воздействия на объект может иметь
слишком большую инерционность или
гистерезис; могут быть также ошибки в
монтаже системы, плохое заземление,
обрывы проводников и т.д. Поэтому, прежде
чем начинать автоматическую настройку,
необходимо убедиться в отсутствии пере‑
численных проблем. Например, если
вследствие износа механической системы
появился непредусмотренный проектом
гистерезис и поэтому система находится
в режиме колебаний, под‑ стройка
регулятора может не дать желаемого
результата, пока не устранена причина
проблемы. 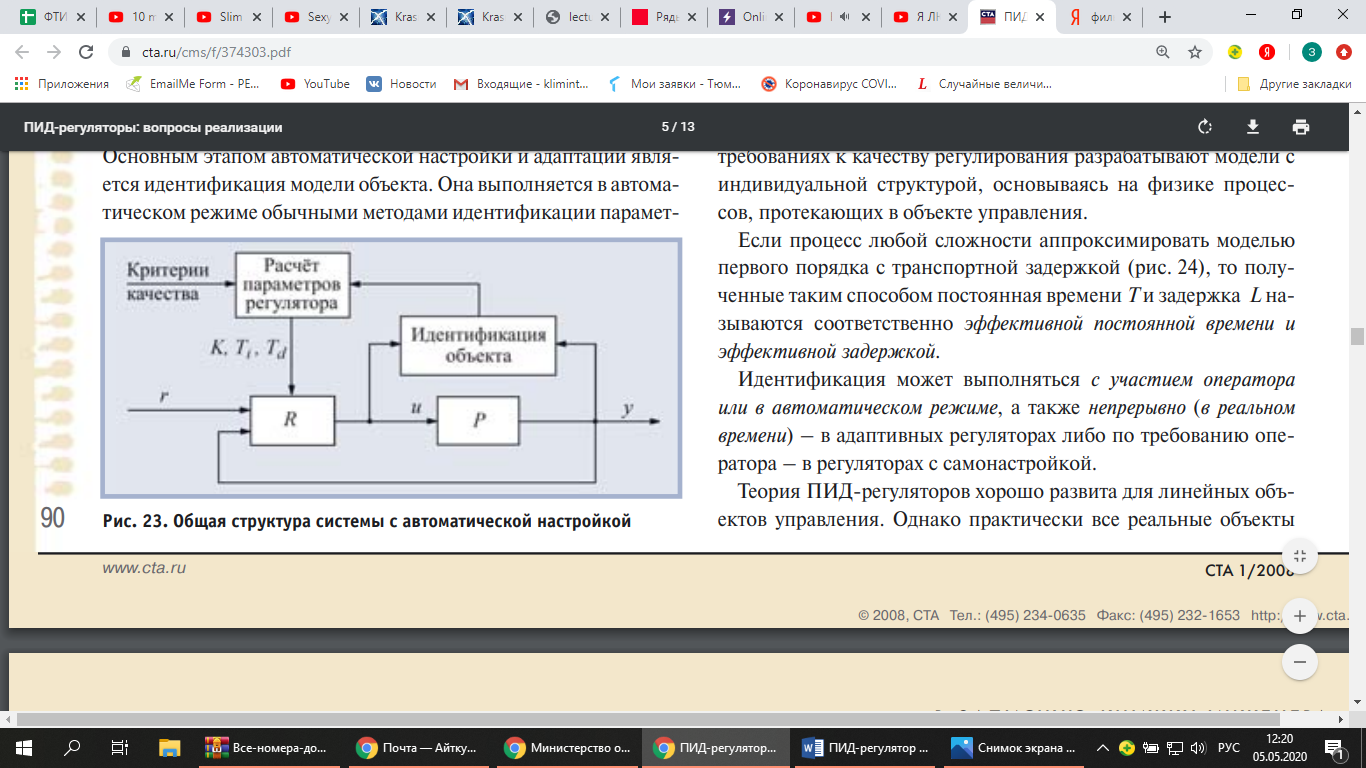 Структурная
схема самонастраивающейся системы
приведена на рисунке.
Структурная
схема самонастраивающейся системы
приведена на рисунке.
Автонастройка практически не имеет никаких особенностей по сравнению с описанными ранее методами, за исключением того, что она выполняется в автоматическом режиме. Основным этапом автоматической настройки и адаптации является идентификация модели объекта. Она выполняется в автоматическом режиме обычными методами идентификации параметров моделей объектов управления. Автоматическая настройка может выполняться и без идентификации объекта, основываясь на правилах или поисковых методах.