

Ёмкостные датчики перемещения
Работа данного датчика зависит от того как ёмкость конденсатора изменяется относительно его геометрической установки. Такое утверждение типично для тех случаев, когда под физическим воздействием со стороны измеряемого объекта изменяется диаметр пластины, что ведет к увеличению или к уменьшению его емкости.
(2.1)

где
 — электрическая постоянная;
— электрическая постоянная;
 — относительная
диэлектрическая проницаемость;
— относительная
диэлектрическая проницаемость;
 — площадь
пластин, м2;
— площадь
пластин, м2;
 — начальный
зазор, м;
— начальный
зазор, м;
 —
перемещение, м.
—
перемещение, м.
На рисунке показано направление движения при изменении координаты х и определение значения х этого перемещения.
(2.2) конденсатора в омах.
конденсатора в омах.
 Где
Где
 —
частота питающей сети, Гц.
—
частота питающей сети, Гц.
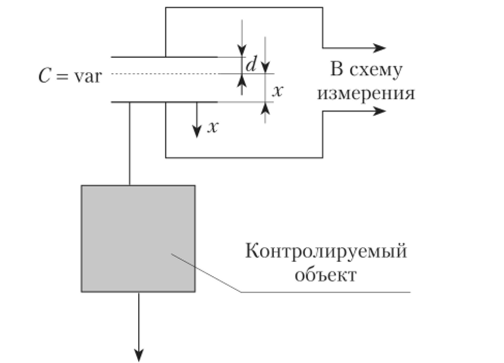 Функциональная
схема датчика показана на рисунке 1.1.
По этому рисунку видно, как интересующий
нас объект оказывает влияние на пластины
конденсатора. Поскольку накопленный
заряд конденсатора напрямую зависит
от положения одной пластины относительно
другой, определение уровня ёмкости при
известных других параметрах дает
возможность судить о величине зазора
между пластинами. Изменение емкости
можно найти несколькими методами. Один
из них заключается в том, что в течение
полного цикла перемещения объекта
необходимо вычислять его импеданс, но
при этом конденсатор должен быть
постоянно подключен в цепь питания. Не
решает нашу задачу, так как слишком
маленькая скорость измерений.
Функциональная
схема датчика показана на рисунке 1.1.
По этому рисунку видно, как интересующий
нас объект оказывает влияние на пластины
конденсатора. Поскольку накопленный
заряд конденсатора напрямую зависит
от положения одной пластины относительно
другой, определение уровня ёмкости при
известных других параметрах дает
возможность судить о величине зазора
между пластинами. Изменение емкости
можно найти несколькими методами. Один
из них заключается в том, что в течение
полного цикла перемещения объекта
необходимо вычислять его импеданс, но
при этом конденсатор должен быть
постоянно подключен в цепь питания. Не
решает нашу задачу, так как слишком
маленькая скорость измерений.
Рисунок 1.1 – Емкостной датчик линейного перемещения с изменяющейся величиной зазора
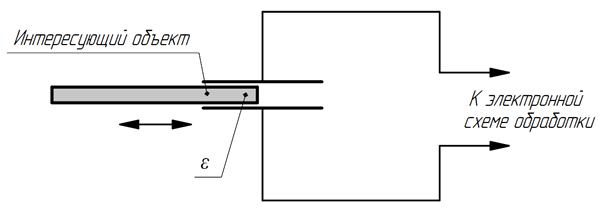
Следующей
схемой где на выходе снимется показания
электрической емкости конденсатора,
имеющая в наличии плоскостной конденсатор
с подвижным непроводящим электрический
заряд материалом. Схема такого датчика
показана на рисунке 1.2. Движение
непроводящего материала между пластинами
конденсатора также, как и в предыдущем
случае приводит к изменению емкости.
Материал неким образом монтируется на
испытуемый объект, в этом случае по
изменению емкости можно судить о том
на какое расстояние переместился объект.
Существуют и другие варианта такого
типа датчика. Если материал обладает
свойством не проводить электрический
ток, 13 то в таком случае он может служить
в качестве диэлектрической среды в
 конденсаторе.
Не решает нашу задачу, слишком низкая
частота измерений.
конденсаторе.
Не решает нашу задачу, слишком низкая
частота измерений.
Рисунок 1.2 – Емкостной датчик линейного перемещения с подвижным диэлектриком
Индуктивные датчики перемещения
Индуктивные датчики, как и емкостные, предназначены для преобразования механического перемещения в электрическую величину — напряжение или ток.
Индуктивные датчики можно разделить на две группы:
- параметрические датчики с переменной индуктивностью L;
- генераторные датчики с переменной взаимной индуктивностью М.
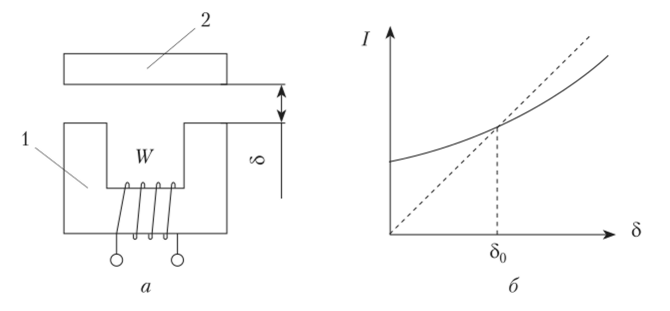
Параметрические датчики с переменной индуктивностью L. Датчики первой группы представляют собой индуктивную катушку с ферромагнитным сердечником, индуктивность L которой изменяется в зависимости от перемещения одной из подвижных деталей, в результате чего изменяется воздушный зазор в магнитопроводе индуктивной катушки (рис. 3, а).
(3.1)

 Известно,
что индуктивные катушки, имеющие
магнитный сердечник, из-за нелинейной
характеристики намагничивания стали
имеют нелинейную вольтамперную
характеристику и генерируют в цепях, в
которые они включены, высшие гармонические
тока. Поэтому на практике наиболее
широкое распространение получили
датчики с линейными характеристиками,
имеющие в магнитной цепи воздушные или,
правильнее сказать, немагнитные зазоры
(см. рис. 3, а). В этом случае магнитное
сопротивление сердечника определяется
в основном магнитным сопротивлением
зазоров, поэтому нелинейность магнитной
характеристики стали практически не
оказывает влияния на протекающий по
катушке ток, который при синусоидальном
напряжении также будет практически
синусоидальным. Индуктивные катушки с
воздушным зазором обладают практически
линейными характеристиками. При
номинальном токе индукцию в сердечнике
выбирают в пределах 0,7—1,2 Тл.
Известно,
что индуктивные катушки, имеющие
магнитный сердечник, из-за нелинейной
характеристики намагничивания стали
имеют нелинейную вольтамперную
характеристику и генерируют в цепях, в
которые они включены, высшие гармонические
тока. Поэтому на практике наиболее
широкое распространение получили
датчики с линейными характеристиками,
имеющие в магнитной цепи воздушные или,
правильнее сказать, немагнитные зазоры
(см. рис. 3, а). В этом случае магнитное
сопротивление сердечника определяется
в основном магнитным сопротивлением
зазоров, поэтому нелинейность магнитной
характеристики стали практически не
оказывает влияния на протекающий по
катушке ток, который при синусоидальном
напряжении также будет практически
синусоидальным. Индуктивные катушки с
воздушным зазором обладают практически
линейными характеристиками. При
номинальном токе индукцию в сердечнике
выбирают в пределах 0,7—1,2 Тл.
Рисунок 3 – Схема индуктивно-плоскостного преобразователя: а — конструкция; б — статическая характеристика; 1 — ферромагнитный сердечник; 2 — подвижный якорь.
Рассмотрим, как определить индуктивность L катушки с воздушным зазором. Будем считать для упрощения, что активное сопротивление катушки равно нулю. Тогда индуктивное сопротивление XL определяется по закону Ома:

(3.2) — действующие
значения напряжения, ЭДС и тока индуктивной
катушки.
— действующие
значения напряжения, ЭДС и тока индуктивной
катушки.
(3.3)

где — частота питающего напряжения.
(3.4)
Здесь  —
число витков обмотки катушки;
—
площадь поперечного сечения магнитоировода,
м2;
—
число витков обмотки катушки;
—
площадь поперечного сечения магнитоировода,
м2;
 и
и  —
максимальные значения амплитуды
—
максимальные значения амплитуды
 ,
магнитного потока, Вб, и амплитуды
индукции,
Тл, в сердечнике катушки.
,
магнитного потока, Вб, и амплитуды
индукции,
Тл, в сердечнике катушки.
(3.5)

где  — амплитуда
тока, А, который считаем синусоидальным.
— амплитуда
тока, А, который считаем синусоидальным.
(3.6) и
тока
записывается
так:
и
тока
записывается
так:

Здесь
 — длина средней линии магнитопровода
катушки. Выразим из амплитуду тока
катушки:
— длина средней линии магнитопровода
катушки. Выразим из амплитуду тока
катушки:

(3.7) —
магнитная постоянная;
—
магнитная постоянная;
 —
относительная магнитная проницаемость
стального магнитопровода.
—
относительная магнитная проницаемость
стального магнитопровода.
(3.8)

(3.9)

Здесь  и
и  — напряженность
магнитного поля в стали и в воздушном
зазоре соответственно.
— напряженность
магнитного поля в стали и в воздушном
зазоре соответственно.
(3.10)

В
выражении значение
 значительно меньше, чем значение .
Поэтому им можно пренебречь, не допуская
при этом большой погрешности.
значительно меньше, чем значение .
Поэтому им можно пренебречь, не допуская
при этом большой погрешности.
(3.11)

Подставив, получим выражение для индуктивности L катушки с воздушным зазором :

(3.12) обратно пропорциональны величине
воздушного зазора .
Ток в катушке, обратно пропорциональный
ее индуктивному сопротивлению, имеет
зависимость от зазора, близкую к линейной
(рис. 3, б).
обратно пропорциональны величине
воздушного зазора .
Ток в катушке, обратно пропорциональный
ее индуктивному сопротивлению, имеет
зависимость от зазора, близкую к линейной
(рис. 3, б).
Индуктивные датчики являются бесконтактными, так как между движущимся сердечником и обмоткой есть зазор. Благодаря этому такие датчики почти не подвержены износу. Прочный корпус позволяет эксплуатировать их в тяжелых условиях: под давлением, при высоких температурах, под водой. По принципу действия индуктивные датчики представляют собой устройства, в которых изменяется индуктивное сопротивление при изменении положения подвижной части датчика, укрепленной на перемещающемся объекте контроля.
Датчики
с переменной взаимной индукцией М
представляют собой трансформаторные
или генераторные датчики. У датчиков
этого типа обычно имеется два или более
электрических контура, между которыми
отсутствует электрическая связь и
существует магнитная связь, причем
взаимная индуктивность М изменяется в
зависимости от перемещения какой-либо
части устройства. Один из контуров
является первичным, и к нему подводится
переменное напряжение от источника
питания. Во вторичном контуре наводится
ЭДС, величина которой изменяется в
зависимости от изменения взаимной
индуктивности катушек. Выходной
координатой датчиков этого типа можно
считать взаимную индуктивность или
напряжение
 ,
снимаемое со вторичной обмотки датчика
при постоянном действующем значении
питающего напряжения
,
снимаемое со вторичной обмотки датчика
при постоянном действующем значении
питающего напряжения
 на первичной обмотке трансформатора.
на первичной обмотке трансформатора.