

Тема 13. Промышленные сети и интерфейсы
13.5.CAN.
13.6.Profibus.
13.7.Modbus.
1
13.5.CAN
•CAN (Controller Area Network) комплекс стандартов для построения распределенных промышленных сетей, c последовательной передачей данных в реальном времени с очень высокой степенью
надежности и защищенности.
2
13.5.CAN
•Центральное место в CAN занимает протокол
канального уровня модели OSI.
•Первоначально разработан для автомобильной промышленности.
3
13.5. CAN
•Свойства CAN :
–каждому сообщению (а не устройству) устанавливается свой приоритет;
–гарантированная величина паузы между двумя актами обмена;
4
13.5.CAN
–гибкость конфигурирования и возможность модернизации системы;
–широковещательный прием сообщений с синхронизацией времени;
5
13.5.CAN
–непротиворечивость данных на уровне всей системы;
–допустимость нескольких ведущих устройств в сети ("многомастерная сеть");
–способность к обнаружению ошибок и сигнализации об их наличии;
6
13.5.CAN
–автоматический повтор передачи сообщений, доставленных с ошибкой, сразу, как только сеть станет свободной;
–автоматическое различение сбоев и отказов с возможностью автоматического отключения отказавших модулей.
7
13.5.CAN
–Кабель витой пары в сети CAN должен иметь общий (третий) провод
–На обоих концах витой пары должны быть согласующие резисторы, сопротивление которых равно волновому сопротивлению кабеля.
–Максимальная длина кабеля составляет 1 км.
8

13.5. CAN
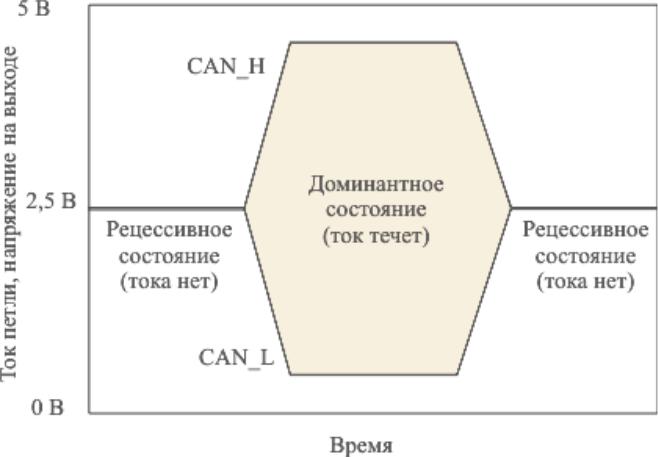
• При подаче уровня логического нуля на вход (вход является инвертирующим) оба транзистора выходного каскада передатчика открываются
9

13.5. CAN
• через нагрузку (два резистора по 120 Ом) течет ток, создающий в линии состояние, соответствующее
логической единице.
10
13.5. CAN
• При этом потенциал вывода CAN_H всегда будет выше, чем вывода CAN_L
11

13.5. CAN
• Логическая единица всегда доминирует над логическим нулем.
12

13.5. CAN
• в CAN используется понятие " доминантное состояние" (доминирующее) состояние линии для обозначения состояния линии с током
13

13.5. CAN
• и понятие "рецессивное состояние" как противоположное доминантному
14

13.5. CAN
• если передатчик посылает в линию рецессивное состояние, а в ней при этом остается доминантное, значит линия занята
15

13.5. CAN
• Доступ получает тот узел сети, который может предоставить ей доминантный уровень сигнала.
16

13.5. CAN
• Узлы с рецессивным уровнем покидают линию и ждут следующего случая.
17
13.5. CAN
18
13.5.CAN
–В CAN сети ни один из узлов не имеет адреса.
–Сообщения посылаются "всем", но содержат идентификатор, который описывает смысл посылаемых данных.
–Сообщение принимается узлом, если его идентификатор проходит через фильтр сообщений, имеющийся в каждом узле.
19
13.5.CAN
–Передавать сообщения могут все устройства.
–Но каждое сообщение имеет свой приоритет при получении доступа к шине.
–Передачу может осуществить только одно устройство - то, которое содержит сообщение с наивысшим приоритетом.
20
13.5.CAN
–Если два или более устройств обнаружили, что линия свободна и начали передачу сообщений одновременно, то возникший конфликт разрешается путем побитного сравнения идентификатора передаваемого сообщения с состоянием линии.
21
13.5.CAN
–В процессе арбитража (урегулирования конфликта) каждое устройство сравнивает логический уровень передаваемого бита с логическим уровнем на шине.
–Если эти уровни одинаковы, устройства продолжают передавать следующий бит идентификатора.
22
13.5.CAN
–Если приемник устройства показывает, что на шине доминантный уровень, а передатчик в это же время передает рецессивный уровень, то устройство сразу прекращает передачу данного сообщения.
23