

Система автоматического управления Митенков Ф.М., Чирков В.А
..pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «НИЖЕГОРОДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ им. Р.Е. АЛЕКСЕЕВА»
Ф. М. Митенков, В. А. Чирков
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Рекомендовано Ученым советом Нижегородского государственного технического университета им. Р.Е. Алексеева в качестве учебного пособия
для студентов по специальности 14.05.01 «Ядерные реакторы и материалы»; для бакалавров по направлению 14.03.02 «Ядерные физика и технологии»
Нижний Новгород 2015
УДК 621.039.52
Митенков Ф. М., Чирков В. А.
Система автоматического управления.: учеб. пособие / Ф. М. Митенков, В. И. Чирков; Нижегород. гос. техн. ун-т им. Р.Е. Алексеева. Нижний Новгород, 2015. – 159 с.
Рассматриваются особенности реактора как объекта управления и его простейшие математические модели; описываются основные принципиальные схемы управления, регулирования и защиты реактора; излагаются вопросы выбора эффективности и быстродействия органов регулирования, компенсации избыточной реактивности и аварийной защиты.
Предназначено для студентов, обучающихся по специальности 14.05.01 «Ядерные реакторы и материалы»; для бакалавров по направлению 14.03.02 «Ядерные физика и технологии».
Библиогр.: 24 назв.
УДК 621.039.52
©Нижегородский государственный технический университет им. Р. Е. Алексеева, 2015
©Митенков Ф. М., Чирков В. А., 2015
1
ОГЛАВЛЕНИЕ
Глава I. Общие сведения из теории автоматического управления................... |
4 |
|
§ 1-1. |
Основные понятия теории автоматического управления ....................... |
4 |
§ 1-2. |
Принципы управления и регулирования ....................................................................... |
7 |
§ 1-3. |
Функциональные схемы ............................................................................................................ |
9 |
§ 1-4. |
Классификация автоматических систем ..................................................................... |
10 |
§ 1-5. |
Этапы создания автоматических систем .................................................................... |
12 |
§ 1-6. |
Исследование автоматических систем ......................................................................... |
13 |
§ 1-7. |
Характеристика звеньев линейных (линеаризованных) систем ................ |
15 |
§ 1-8. |
Структурные схемы линейных систем......................................................................... |
18 |
§ 1-9. |
Характеристики качества САУ.......................................................................................... |
21 |
§ 1-10. Устойчивость линейных систем..................................................................................... |
24 |
|
Глава II. Ядерная энергетическая установка как объект управления........... |
29 |
|
§ 2-1. |
Принципиальная схема и состав оборудования ЯЭУ........................................ |
29 |
§ 2-2. |
Реактор................................................................................................................................................. |
32 |
§ 2-3. |
Парогенератор................................................................................................................................ |
34 |
Глава III. Кинетика ядерного реактора ................................................................ |
37 |
|
§ 3-1. |
Основные характеристики самоподдерживающейся реакции |
|
|
деления ............................................................................................................................................... |
37 |
§ 3-2. |
Запаздывающие нейтроны .................................................................................................... |
41 |
§ 3-3. |
Уравнение кинетики реактора............................................................................................ |
44 |
§ 3-4. |
Кинетика при постоянной реактивности .................................................................... |
48 |
§ 3-5. |
Одна группа запаздывающих нейтронов.................................................................... |
52 |
§ 3-6. |
Линейное изменение реактивности ................................................................................ |
56 |
§ 3-7. |
Решение уравнений кинетики в различных приближениях.......................... |
58 |
Глава IV. |
Обратные связи в реакторе ................................................................... |
62 |
§ 4-1. |
Общие сведения ............................................................................................................................ |
62 |
§ 4-2. |
Температурные обратные связи ........................................................................................ |
63 |
§ 4-3. |
Температура элементов активной зоны реактора в нестационарных |
|
|
режимах.............................................................................................................................................. |
73 |
§ 4-4. |
Мощностной коэффициент реактивности ................................................................. |
75 |
§ 4-5. |
Нестационарное отравление ................................................................................................ |
77 |
Глава V. Режимы реактора ...................................................................................... |
80 |
|
§ 5-1. |
Подкритический режим........................................................................................................... |
80 |
§ 5-2. |
Критический и надкритический режимы ................................................................... |
86 |
§ 5-3. |
Условия вывода реактора в критический режим.................................................. |
87 |
Глава VI. |
Органы управления реактора .............................................................. |
89 |
§ 6-1. |
Органы регулирования ............................................................................................................ |
89 |
§ 6-2. |
Органы компенсации избыточной реактивности ................................................. |
92 |
§ 6-3. |
Органы аварийной защиты реактора ............................................................................. |
95 |
Глава VII. Измерение контролируемых и регулируемых параметров .......... |
98 |
|
§ 7-1. |
Объем измерений и требования к средствам измерений ................................ |
98 |
§ 7-2. |
Ионизационная камера .......................................................................................................... |
100 |
Глава VIII. Системы управления, регулирования и защиты реактора....... |
105 |
|
§ 8-1. |
Система автоматического пуска ..................................................................................... |
105 |
§ 8-2. |
Система автоматического регулирования мощности...................................... |
107 |
§ 8-3. |
Система автоматического разогрева............................................................................ |
111 |
§ 8-4. |
Система аварийной защиты реактора ......................................................................... |
113 |
Глава IX. Теплообмен в активной зоне и его регулирование......................... |
117 |
|
|
2 |
|
§ 9-1. |
Теплообмен в активной зоне ............................................................................................. |
118 |
|
§ 9-2. |
Теплообмен в неустановившихся режимах ............................................................ |
122 |
|
§ 9-3. |
Управление теплоотводом в реакторе ........................................................................ |
127 |
|
§ 9-4. |
Аварийное расхолаживание реактора......................................................................... |
132 |
|
Глава X. Регулирование давления в реакторе................................................... |
138 |
||
§ 10-1. Способы компенсации изменения объема теплоносителя........................ |
138 |
||
Глава XI. Регулирование теплообмена в парогенераторах (ПГ) ................... |
143 |
||
§ 11-1. |
Особенности теплообмена в ПГ различных типов......................................... |
143 |
|
§ 11-2. |
Регулирование теплообмена в ПГ прямоточного типа................................ |
145 |
|
§ 11-3. |
Регулирование расхода теплообмена в ПГ с МПЦ (ПГ с постоянным |
||
|
|
уровнем)........................................................................................................................................ |
147 |
§ 11-4. |
Взаимосвязь систем управления ППУ и ПТУ.................................................... |
152 |
|
Библиографический список................................................................................... |
156 |
||
3
ГЛАВА I
ОБЩИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ.
Работающие системы, машины или агрегаты, вообще говоря, всегда подвергаются плановым или неплановым воздействиям, которые приводят или могут привести к изменению первоначального режима работы. Поэтому их нормальная эксплуатация невозможна без принятия специальных мер, обеспечивающих необходимую согласованность в работе составных частей при заданном режиме работы или плановом его изменении, а так же компенсацию неплановых воздействий, возмущающих в недопустимых пределах заданный режим работы системы.
Исследование общих закономерностей, определяющих необходимые и достаточные условия создания управляемых систем, машин, агрегатов является предметом общей теории управления. Важнейшей составной частью ее является теория автоматического управления, т.е. управления без участия человека.
Методы исследования, развитые теорией автоматического управления, имеют достаточно общий характер и могут быть использованы применительно к различным системам, независимо от природы физических процессов, лежащих в основе действия этих систем. Ниже приводятся и кратко поясняются основные понятия, определения, принципы и методические приемы, используемые при построении и исследовании систем автоматического управления.
§ 1-1. Основные понятия теории автоматического управления.
Управляемым или регулируемым объектом называется машина, агрегат (в общем случае система), в которых протекают физические процессы, подлежащие регулированию.
Изменения физического процесса, лежащего в основе действия данного агрегата, обуславливают изменения режима работы последнего. Поскольку любой физический процесс можно охарактеризовать с требуемой в практике точностью с помощью ограниченного набора физических величин, т.е. можно заключить, что и режим работы регулируемого объекта так же описывается ограниченным числом параметров. Следовательно, поддержание заданного режима работы объекта регулирования физически сводится к поддержанию заданных значений характеризующих режим параметров. Поэтому указанные параметры и получили название управляемых (регулируемых или выходных) величин (Y ).
Например, установившийся режим работы энергетического во- до-водяного реактора в полной мере определяется следующими 4 параметрами:
Мощность реактора, расход, давление и температура (на входе или выходе из реактора) теплоносителя 1-го контура. Устройство, обеспечивающее без вмешательства человека поддержание заданного значения регулируемой величины или плановое ее изменение, называется автоматическим регулятором.
4
Очевидно, что автоматический регулятор выполняет свои функции, оказывая воздействие непосредственно на объект управления.
Совокупность объекта управления и автоматического регулятора называют системой автоматического управления (регулирования).
Всю совокупность возможных воздействий на объект управления принято делить на следующие группы:
-контролируемые, т.е. измеряемые в процессе работы объекта, возмущения ( Z ) ;
-неконтролируемые внешние возмущения (F );
-управляющие (входные) воздействия ( X ) .
Разработка системы управления невозможна без всестороннего изучения статических и динамических характеристик объекта, его реакций на внешние воздействия. С этой целью формулируется математическая модель объекта, которая представляет из себя систему дифференциальных и алгебраических уравнений, определяющих зависимость выходных переменных ( Y ) от внешних воздействий ( Z, F, X ), являющихся функциями времени.
Статические зависимости объекта можно получить, исследуя математическую модель объекта при условии, что все временные производные равны нулю, Т.е. в предположении отсутствия или постоянства внешних воздействий.
Основной целью исследования статических зависимостей является получение в явном виде статической характеристики Y = Ф ( X ). Различают статические характеристики:
- |
монотонные, когда |
|
|
не изменяет знака во всем диапазоне изменения |
|
|
|||||
X; |
|
|
|
|
|
- |
экстремальные, когда |
|
|
изменяет знак при изменении X. |
|
|
|
||||
Вряде случаев имеющихся знаний относительно объекта может оказаться недостаточно для формулирования математической модели требуемой точности.
Вэтом случае проводятся специальные эксперименты для восполнения в той или иной форме недостающей части знаний об объекте.
Экспериментальное получение статических характеристик достаточно широко используется в инженерной практике.
Всякая реальная физическая система обладает очень большим числом степеней свободы. Поэтому в общем случае дифференциальные уравнения, составлявшие ее математическую модель, будут уравнениями в частных производных.
Всвязи со сложностью исследования таких уравнений на практике широко используются упрощающие предположения, которые формулируются в зависимости от целей исследования системы. Упрощение обычно достигается путем сокращения числа степеней свободы системы и за счет упрощения зави-
5
симостей, описывающих взаимосвязь параметров системы с учетом внешних воздействий.
Существенное уменьшение числа степеней свободы позволяет перейти от уравнений в частных производных к обыкновенным дифференциальным уравнениям.
Принято называть объекты, описываемые уравнениями в частных производных, объектами с распределенными параметрами, а обыкновенными дифференциальными уравнениями - объектами с сосредоточенными параметрами.
Характер взаимозависимостей параметров систем определяет тип дифференциальных уравнений: линейные и нелинейные.
Если объект управления описывается линейными дифференциальными уравнениями, его принято называть линейным. Различают устойчивые, неустойчивые и нейтральные объекты управления. Объект называют устойчивым, если после прекращения внешнего воздействия он вновь приходит к установившемуся равновесному состоянию в соответствии с его статическими характеристиками. ,
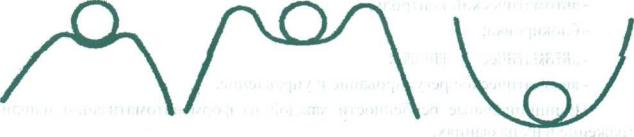
В неустойчивом объекте после прекращения внешнего воздействия выходные переменные продолжают изменяться и объект не приходит к установившемуся равновесному состоянию. Нейтральными объектами называются такие объекты, которые после прекращения внешнего воздействия приходят в новое произвольное состояние равновесия, отличающееся от исходного и зависящее от произведенного внешнего воздействия. Следует
а) |
б) |
в) |
Рис. 1.1. Примеры устойчивости: |
а), "в малом" б), "в большом" в), "в целом" |
заметить, что "нелинейные" объекты управления (объекты с нелинейными статическими характеристиками), а так же линейные объекты с изменяющимися во времени параметрами, вообще говоря, могут находиться в любом из перечисленных выше состояний в зависимости от режима работы и характера, величины внешних воздействий.
Существуют практически важные понятия устойчивости "в малом", "в большом" и "в целом".
Объект называется устойчивым "в малом", если он остается устойчивым при сколь угодно малых внешних воздействиях.
Объекты, устойчивые "в большом” характерны тем, что они сохраняют устойчивое равновесие и при конечных внешних воздействиях при условии, что последние не превышают некоторых предельных значений.
6
Если объект остается устойчивым при любых величинах внешних воздействий, то говорят, что он устойчив "в целом". На рис. 1.1 приведены примеры, иллюстрирующие перечисленные виды устойчивости для случая качения шара по криволинейной поверхности при наличии сил трения и тяжести.
§ 1-2. Принципы управления и регулирования.
Управление и регулирование любым физическим процессом, независимо от того осуществляется ли оно вручную, т.е. непосредственно человеком или автоматически, предполагает:
измерение тем или иным способом значения выходной (управляемой) переменной;
сравнения измеренной выходной величины с заданным ее значением;
в случае недопустимого рассогласования заданного и фактического значений выходной переменной оказывается воздействие на протекание управляемого процесса с целью уменьшения рассогласования до приемлемой величины.
Различные виды управления по существу отличаются степенью автоматизации перечисленных выше этапов регулирования. Различают следующие формы автоматизации:
технологическая сигнализация,
дистанционное управление;
автоматический контроль;
блокировка;
автоматическая защита;
автоматическое регулирование и управление.
Принципиальные особенности каждой из форм автоматизации нашли отражение в их названиях.
Наиболее полная и совершенная форма автоматизации достигается при автоматическом регулировании и управлении, когда участие человека в процессе управления полностью исключено. Кроме того, если при других формах автоматизации используемые автоматические устройства выполняют одноразовые функции, следуя строго определенной, жесткой программе, то функционирование автоматических систем управления возможно только при использовании достаточного объема информации об управляемых процессах в объектах управления.
В целом работа автоматических систем определяется характером и величиной контролируемых и неконтролируемых воздействий. Заданное значение выходной переменной может быть либо постоянным, либо изменяющимся во времени.
Процесс поддержания заданного значения выходной переменной без участия человека называется автоматическим регулированием. Таким образом,
7
автоматическое регулирование сводится к компенсации возмущающих воздействий с требуемой точностью. Процесс изменения по некоторому заданному закону выходной переменной объекта без участия человека называется автоматическим управлением. Следовательно, для автоматического управления характерно изменение по заданному закону задающего сигнала, который система автоматического управления должна воспроизводить, "отрабатывать" с заданной точностью.
Совокупность предписаний, в соответствии с которой формируется управляющее воздействие на объект, называется законом (алгоритмом) регулирования или управления.
Известны линейные и нелинейные законы управления. В случае линейного закона управлении автоматический регулятор вырабатывает воздействующий сигнал, который пропорционален входной переменной.
К нелинейным законам управления прибегают во многих случаях для получения заданных качеств автоматической системы, а в тех случаях, когда в регуляторе имеются логические элементы или другие существенно нелинейные элементы, то нелинейный закон управления является вынужденным.
Принципиальной особенностью современных автоматических систем управления является использование обратной связи (принцип обратной связи), когда на вход автоматического регулятора подается сигнал, соответствующий отклонению выходной переменной. Если этот сигнал пропорционален отклонению выходной переменной, то обратная связь называется жесткой.
При гибкой обратной связи сигнал, подаваемый на вход регулятора, вырабатывается не только при отклонении выходной переменной от заданного значения, но и при появлении ее производной. Следствием использования обратных связей является то, что образуется замкнутый управляющий контур, по которому управляющее воздействие передается вдоль контура только во вполне определенном направлении.
В зависимости от особенностей формирования сигнала обратной связи различают следующие виды систем управления (регулирования):
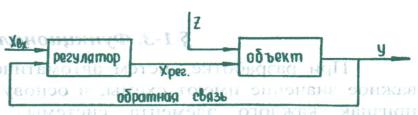
системы управления, работающие по принципу отклонения (в этом случае на вход регулятора подается сигнал, соответствующий рассогласованию заданного и фактического значений выходной величины - сигнал ошибки), см.
рис. 1.2;
Рис. 1.2. Условное изображение системы регулирования по принципу отклонения XРЕГ - воздействия на объект
8
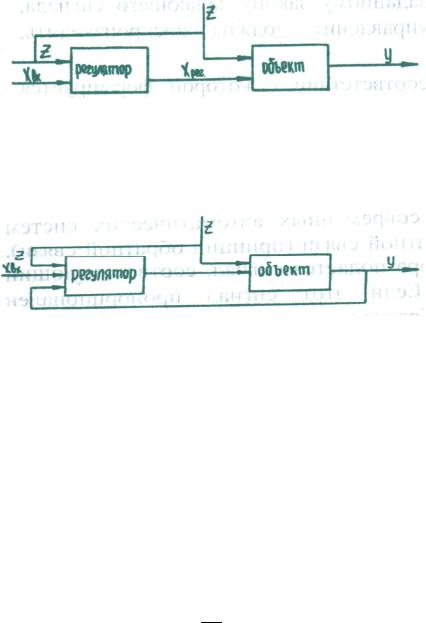
системы управления (регулирования), работающие по принципу компенсации возмущения (поддержание заданной выходной величины, обеспечивается за счет регулирующего воздействия компенсирующего влияние возмущающих воздействий), см. рис. 1.3;
Рис. 1.3. Условное изображение системы управления по принципу компенсации
системы управления (регулирования), работающие по комбинированному принципу регулирования, т.е. с использованием и принципа отклонения, и принципа компенсации возмущения (см. рис. 1.4).
Рис. 1.4. Условное изображение системы управления с комбинированным принципом регулирования
Одним из наиболее важных вопросов при создании автоматических систем управления является обеспечение необходимой точности поддержания выходных переменных в установившихся (статических) режимах и минимального перерегулирования в переходных (нестационарных) режимах.
По виду статических характеристик систем У = Ф ( X ), соответствующих установившимся режимам работы (отсутствуют временные изменения переменных), различают статическое и астатическое регулирование и управление в зависимости от величины ошибки регулирования, которую принято характеризовать так называемой степенью неравномерности или статизмом системы согласно соотношению:
YФ, YЗ - фактическое и заданное значения выходной переменной при максимальном нагружении системы.
Если , то регулирование или управление называется астатическим, если , то статическим.
§ 1-3. Функциональные схемы.
При разработке систем автоматического управления и регулирования важное значение имеют схемы, в основу которых положен функциональный признак каждого элемента системы. Такие схемы получили название функциональных. По функциональному признаку среди основных элементов систем
9