

4918
.pdf31
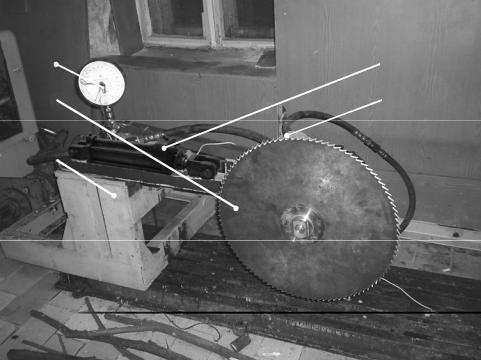
7.2. Оборудование, применяемое в экспериментальных исследованиях
Для лабораторных исследований используется натурный образец манипулятора ЛВ-210-01, смонтированный на раму сварной конструкции из швеллеров № 10. Манипулятор состоит из стрелы с удлинителем (рис.7.1), поворотной колонны, механизма поворота. Гидросистема манипулятора подключена к насосной станции, а дополнительный демпфер с помощью гибких трубопроводов подсоединен к поршневой и штоковой полостям гидроцилиндра механизма подъема стрелы. В трубопроводы демпфера подключен датчик давления рабочей жидкости фирмы Danfoss.
Рис. 7.1. Общий вид манипулятора ЛВ-210-01 с контрольно-измерительной аппаратурой и демпфером
Изменения давления в подводящей гидромагистрали отслеживаются датчиком, который снабжён демпфирующим устройством для предотвращения его выхода из строя при гидравлическом ударе.
32
7.3. Методика проведения экспериментальных исследований
При проведении лабораторного эксперимента выделены 4 этапа работы манипулятора: 1 - включение; 2 - начало подъёма; 3 - окончание подъема; 4 - начало опускания; 5 - окончание опускания.
Измерение давления и поворота стрелы проводится при следующих схемах испытания:
а) в поршневую и штоковую полости гидроцилиндра механизма подъёма устанавливались поочередно дроссели диаметром 1; 2; 3; 4; 5; 6 мм.
б) изменялись объёмы полостей демпфера, соединенные с поршневой и штоковой полостями, соответствующие диаметрам 20; 30; 40; 50; 60 мм.
7.4. Методика планирования полнофакторного эксперимента при двухфакторной оптимизации параметров демпфера
Предварительный анализ привел к заключению, что на эффективность демпфирования наибольшее влияние оказывают следующие конструктивные параметры:
-диаметры дросселирующих каналов dК (или отдельно диаметры дросселирующих каналов поршневой и штоковой части демпфера dКП и dКШ);
-соотношение диаметров запираемых полостей dП / dШ;
-масштабный коэффициент (размер) демпфера K.
Оптимизация параметров демпфера по критерию минимального давления рабочей жидкости осуществляется помощью метода планирования полнофакторного эксперимента (ПФЭ).
На основании априорного исследования с учетом теоретических и экспериментальных данных были отобраны для изучения следующие факторы:
Х1 - диаметр дросселирующего канала демпфера dК; Х2 - диаметр полости демпфера dп.
При составлении плана эксперимента были намечены интервалы варьирования и уровни факторов в соответствии с теоретическими исследованиями (табл. 7.2).
Матрица планирования эксперимента представлена в табл. 7.1.
33
|
|
|
|
|
|
|
|
Таблица 7.1 |
|
|
Матрица планирования эксперимента |
||||||
|
|
|
|
|
|
|
|
|
№ опыта |
Кодированные значения |
|
Результат опыта |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Х1 |
|
Х2 |
Х1Х2 |
Х12 |
Х22 |
У, МПа |
|
|
|
|
|
|
|
|
|
|
1 |
- |
|
- |
+ |
+ |
|
+ |
|
|
|
|
|
|
|
|
|
|
2 |
+ |
|
- |
- |
+ |
|
+ |
|
|
|
|
|
|
|
|
|
|
3 |
- |
|
+ |
- |
+ |
|
+ |
|
|
|
|
|
|
|
|
|
|
4 |
+ |
|
+ |
+ |
+ |
|
+ |
|
|
|
|
|
|
|
|
|
|
5 |
- |
|
0 |
0 |
+ |
|
0 |
|
|
|
|
|
|
|
|
|
|
6 |
+ |
|
0 |
0 |
+ |
|
0 |
|
|
|
|
|
|
|
|
|
|
7 |
0 |
|
- |
0 |
+ |
|
0 |
|
8 |
0 |
|
|
|
|
|
|
|
|
+ |
0 |
+ |
|
0 |
|
||
|
|
|
|
|
|
|
|
|
Матрицу реализуем в трехкратной повторности, кодирование факторов
произведено по формуле |
|
|
|
χi = |
X i − X oi |
, |
(7.1) |
|
|||
|
ε |
|
|
где χi – кодированное значение фактора (безразличная величина); Хi – натуральное значение фактора;
Хoi – натуральное значение фактора на основном уровне (нулевом); ε – натуральное значение интервала варьирования фактора.
ε = |
Х iВ − X iH |
, |
(7.2) |
|
2 |
||||
|
|
|
где ХiВ – верхний уровень фактора (+); XiH – нижний уровень фактора (-).
Интервалы варьирования и уровни факторов приведены в табл. 7.2. По
−
полученным средним значениям критерия оптимизации У (давление рабочей жидкости) рассчитывается математическая модель в виде уравнения регрессии второго порядка
- |
|
+ b |
X + b |
|
X |
|
+ b |
X2 |
+ b |
|
X2 |
+ b |
|
X X |
|
, |
(7.3) |
|
У = b |
0 |
2 |
2 |
22 |
|
2 |
||||||||||||
|
1 |
1 |
|
|
11 |
1 |
|
2 |
12 |
1 |
|
|
||||||
где b0 , b1,b2 ,b11 b12 , b22 |
– |
коэффициенты |
регрессии, |
определяемые |
по |
|||||||||||||
формулам, приведенным в справочной литературе.
34
В результате расчетов по стандартной программе получаем уравнение регрессии второго порядка в кодированном виде.
|
|
Таблица 7.2 |
|
Интервалы варьирования и уровни факторов |
|
|
|
|
|
|
|
Уровень и интервалы варьирования факторов |
dК, мм |
|
dп, мм |
|
|
|
|
Условное обозначение |
Х1 |
|
Х2 |
|
|
|
|
Верхний уровень (+) |
2 |
|
|
|
|
|
|
Основной уровень (0) |
4 |
|
|
|
|
|
|
Нижний уровень (-) |
6 |
|
|
|
|
|
|
Интервал варьирования |
2 |
|
|
|
|
|
|
7.4. Содержание отчета
Название лабораторной работы; цель работы; таблица с заданными, рассчитанными и измеренными параметрами; схема орудия; формулы для вычислений с результатами вычислений; анализ экспериментальных зависимостей; выводы.
7.5. Контрольные вопросы
1.Какие существуют рекомендации по режимам работы манипулятора?
2.Как определить величину давления в поршневой и штоковой полостях гидроцилиндра механизма подъёма и времени поворота стрелы в режимах пуска, вращения, торможения и остановки при наличии дросселей различного диаметра в демпфере?
3. Как измеряются давления в поршневой и штоковой полостях гидроцилиндра механизма подъёма и времени поворота стрелы в режимах пуска, вращения, торможения и остановки без демпфера?
3. Как производится проверка работоспособности гидропривода механизма подъёма манипулятора с подключением демпфера в производственных условиях?

35
Лабораторная работа № 8 ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ РАБОЧИХ ПРОЦЕССОВ
СРЕЗАЮЩИХ УСТРОЙСТВ С ИНЕРЦИОННО-РУБЯЩИМИ РАБОЧИМИ ОРГАНАМИ
8.1.Цель исследований
Программа исследований включает:
–определение усилия срезания и удельной силы перерезания ветвей;
–определение оптимального рабочего режима обрезчика ветвей с дисковой пилой с гидроприводом.
8.2.Оборудование, применяемое в экспериментальных исследованиях
Рабочими органами, осуществляющими ударно-импульсное ножевое
резание, являются ножи, выполненные в виде мачете, серпа, молота и других форм; главным их отличием от других рабочих органов является то, что процесс резания осуществляется не за счёт момента, создаваемого на валу привода, а за счёт сил инерции рабочих органов. Примеры рабочих органов показаны на рис. 8.1.
Рис. 8.1. Ножевые инерционно-рубящие рабочие органы
Данные ножи обладают высокой надёжностью за счёт своей массивности, они могут быть установлены на гибкой связи, что позволяет увеличить рабочую зону, не снижая надёжности работы, т.к. в случае встречи с непреодолимыми препятствиями эти ножи не сломаются, а отклонятся и продолжат свою работу.
Во время перерезания поросли рабочим органом работа затрачивается на трение, пластические и упругие деформации древесины. При рассмотрении древесного ствола с позиций вязко-пластичного тела необходимо учитывать не только напряжения, но и деформацию древесины. В общем случае любой
36
рабочий орган имеет режущий элемент, которым и производится сам процесс перерезания.
При определении размерно-весовых характеристик и биометрических параметров поросли используются стандартные измерительные средства: электронные весы, рулетка, метр, штангенциркуль (ГОСТ 166-80), с погрешностью измерения не более 0,1 мм. При определении влажности поросли в соответствии с ГОСТ 16483.7-71 используется сушильная камера и весы. Контроль за массой осуществляется путем взвешивания образцов на лабораторных электронных весах Adventurer AR520 с относительной погрешностью измерения 0,05 %. При определении физико-механических свойств поросли используется испытательная машина УМЭ–10 ТМ.
Оснастка для проведения испытаний на перерезание поросли была изготовлена аспирантом кафедры механизации лесного хозяйства и проектирования машин ВГЛТА Бухтояровым Л.Д. и является аналогом приведенному ГОСТ 16483.13-72 приспособлению, но модернизированному с целью закрепления образцов круглого сечения (рис. 8.2). В данной работе также использовалось контрольно-измерительное оборудование для лабораторной работы № 1.
Исследование динамических процессов резания проводится на специальном лабораторном стенде, включающий механизм резания с приводом от гидромотора НПА-64, который подключен к насосной станции плоскошлифовального станка ЗБ722 с электроприводом. Насосная станция состоит из следующих основных элементов: маслобака; трех электродвигателей, установленных вертикально на верхней крышке маслобака и предназначенных для привода трех лопастных насосов; регулирующей и контрольной гидроаппаратуры, включающей распределитель, предохранительные клапаны, дроссели и др. Датчики давления рабочей жидкости присоединены к трубопроводам гидромотора механизма резания и подключены через устройства обработки данных к ноутбуку с программным обеспечением.

37
Рис. 8.2. Оснастка для испытаний образцов ветвей на перерезание
Методика определения усилий перерезания поросли и удельной силы резания
Для проведения исследований используются образцы поросли березы диаметрами 10; 15; 25 мм. Перерезание производится на испытательной машине УМЭ-10 ТМ с использованием специальной оснастки с трехкратной повторностью опытов. По результатам замеров усилий резания рассчитывается удельная сила резания по формуле
K p = |
4PрезV |
КН |
, |
(8.1) |
|||||
|
|
|
|
|
|
|
|||
πd |
2 |
b |
|
2 |
|||||
|
|
м |
|
|
|
|
|||
где b – толщина ножа, H – высота пропила.
Свежесрубленные поросли деревьев сохраняют влажность растущего дерева в пределах W = 50…100 %. В данных опытах необходимо использовать образцы с влажностью W около 60 %. В результате рассчитывается корректное изменение давления во время резания.
На рис. 8.3 для примера представлены осциллограммы динамических процессов гидропривода механизма резания. Из рис. 8.3 видно, что при изменении силы резания Fдин = 1.4…25.2 кН, величина которой зависит от диаметра срезаемой поросли и типа гибкого рабочего органа, также линейно возрастают всплески давления и время, затрачиваемое на срез.

38
Рис. 8.3. Исследование динамики гидропривода кустореза с гибкими инерционно-рубящими рабочими органами
Таким образом, обоснованы динамические процессы, происходящие в гидроприводе кустореза, с учётом параметров гидропривода и силы, необходимой для перерезания поросли гибкими инерционно-рубящими рабочими органами.
8.4. Содержание отчета
Название лабораторной работы; цель работы; таблица с заданными, рассчитанными и измеренными параметрами; схема орудия; формулы для вычислений с результатами вычислений; анализ экспериментальных зависимостей; выводы.
8.5. Контрольные вопросы
1. Какие существуют рекомендации по режимам резания поросли хвойных и лиственных пород?
39
2. Перечислить машины, использующие гибкие инерционно-рубящие рабочие органы.
3.Какие динамические процессы происходят в гидроприводе кустореза?
4.Какие параметры гидропривода и силы необходимы для перерезания поросли гибкими инерционно-рубящими рабочими органами?
Лабораторная работа № 9 ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ РАБОЧИХ
ПРОЦЕССОВ СРЕЗАЮЩИХ УСТРОЙСТВ С ДИСКОВЫМИ ПИЛАМИ
9.1. Цель исследований
Программа исследований включает:
–определение усилия срезания и удельной силы перерезания ветвей;
–определение оптимального рабочего режима обрезчика ветвей с дисковой пилой с гидроприводом.
9.2. Оборудование, применяемое в экспериментальных исследованиях
Разработанный нами лабораторный стенд включает раму 1, механизм резания 2 с гидромотором 3, манометром 4, подключенным к компьютеру, и механизмом подачи в виде гидроцилиндра 5 и дросселя (рис. 9.1).
Гидромотор приводится во вращение с помощью насосной станции, которая подает рабочую жидкость в трубопроводы, закрепленные на гидромоторе штуцерами. Использовалось контрольно-измерительное оборудование для лабораторной работы № 1.
Исследование процесса обрезки ветвей дисковой пилой с гидроприводом выполняется на лабораторном стенде. Для каждого опыта выбирается по три образца веток диаметром 20 мм с одинаковыми физикомеханическими свойствами (влажность образцов W должна быть около 60 %).
40
Оптимизация процесса срезания ветвей дисковой пилой с гидроприводом по критерию минимального усилия резания осуществлялась с помощью метода планирования полнофакторного эксперимента (ПФЭ).
При предварительном изучении объекта произведено априорное
ранжирование факторов: |
|
||||
Х1 – скорость подачи (vпод); |
|
||||
Х2 – |
угол встречи ( θ); |
|
|||
Х3 – |
форма зубьев пилы; |
|
|||
Х4 – |
длина гидромагистрали; |
|
|||
Х5 – |
диаметр ветви (d); |
|
|||
Х6 |
– |
влажность древесины (W); |
|
||
Х7 |
– |
угловая скорость дисковой пилы (ω); |
|
||
Х8 |
– |
рабочий объем гидромотора; |
|
||
Х9 |
– диаметр дисковой пилы (D); |
|
|||
Х10 – культура, порода дерева. |
|
||||
|
|
|
|
|
|
|
|
|
4 |
|
5 |
|
|
|
|
|
|
|
|
|
2 |
|
3 |
|
|
|
|
|
|
|
|
|
1 |
|
|
Рис. 9.1. Лабораторный стенд с механизмом резания с дисковой круглой пилой и гидромотором
На основании априорного исследования с учетом теоретических и экспериментальных данных были отобраны для изучения следующие факторы: Х1 – угол встречи (θ); Х2 – cкорость подачи (vпод).