

4795
.pdfМинистерство образования и науки РФ Федеральное государственное бюджетное образовательное учреждение высшего образования «Воронежский государственный лесотехнический университет имени Г.Ф. Морозова»
СРЕДСТВА АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
Методические указания к лабораторным работам для студентов по направлению подготовки
15.03.04 – Автоматизация технологических процессов и производств
Воронеж 2016
2
УДК
Грибанов, А. А. Средства автоматизации технологических процессов [Текст] : методические указания к лабораторным работам для студентов по направлению подготовки 15.03.04 – Автоматизация технологических процессов и производств / А. А. Грибанов; М-во образования и науки РФ, ФГБОУ ВО «ВГЛТУ». – Воронеж, 2016. – 48 с.
Печатается по решению редакционно-издательского совета ВГЛТУ
Рецензент: д.т.н., профессор, зав. кафедрой электротехники и автоматики ФГБОУ ВО «Воронежский государственный аграрный университет имени императора Петра I» Афоничев Д.Н.

3
Лабораторные работы № 1,2 Релейно-импульсные регуляторы
Цель работы: ознакомление с устройством и принципом работы регуляторов и работой их в системе автоматики.
1. Краткие теоретические сведения Регулятор – это устройство предназначенное для поддержания кон-
тролируемой величины, равной заданному значению.
Функционально регуляторы организованы по схеме представленной
на рисунке и состоят из следующих блоков: |
|
|
|
I. Входы: служат для согласования |
прибора с |
|
|
Входы |
|
||
различными типами датчиков и предназначены для |
|
||
|
|
||
подключения измерительных датчиков (термосопро- |
|
|
|
|
|
||
тивлений, термопар, унифицированных сигналов). |
|
|
|
Датчиками температуры служат |
термопары |
|
|
Блок обработки |
|
||
(ТХК, ТКА, PtRh, NiCrNi, Fe-const), термосопротивле- |
данных |
|
|
|
|
|
|
ния (ТСМ 100, ТСМ 50, ТСП 100, ТСП 50), термисто- |
|
ры. |
|
|
|||
Датчики измерения веса, расхода, давления и т.д. |
|
|
|
имеют унифицированный сигнал. |
|
Выходные |
|
Датчики имеют особенности подключения, кото- |
устройства |
|
|
рые будут рассмотрены ниже: |
|
|
|
|
|
|
|
1. Термосопротивления (ТС) – работа таких датчиков |
|
ос- |
|
нована на температурной зависимости электрического |
Рис. 1 |
со- |
|
противления металлов. Датчик выполнен в виде катушки из тонкой медной или платиновой проволоки на каркасе из изоляционного материала, заключенной в защитную гильзу. ТС характеризуется двумя параметрами: Rо – сопротивление датчика при 0 С и W100 – отношение сопротивления датчика при 100 С к сопротивлению его при 0С. В приборах используется двух и трех проводная система подключения. К одному из выводов терморегулятора Rt подключаются два провода, а третий к другому выводу Rt. Эта схема позволяет скомпенсировать сопротивление
трех проводов, при условии, что их сопротивления равны. При двух проводном подключении отсутствует компенсация сопротивления проводов, что приводит к некоторой погрешности показаний.
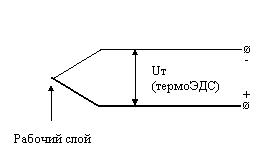
2. Термопара (ТП) – состоит из двух спаянных на одном их концов проводников, изготовленных из металлов обладающих разными термоэлектрическими свойствами. Спаянный конец, называемый рабочим спаем, погружается в измеряемую среду, а свободные концы (холодный спай) термопары подключаются ко входу регулятора. Если температура рабочего и холодного спаев различны, то ТП вырабатывает термоЭДС, которая пода-
4
ется на регулятор. Поскольку термо- |
|
|
ЭДС зависит от разности температур |
|
|
двух спаев ТП, то для получения кор- |
|
|
ректных показаний необходимо знать |
|
|
температуру «холодного спая» (ее сво- |
|
|
бодных концов), чтобы скомпенсиро- |
|
|
вать ее в дальнейших вычислениях. |
|
|
Обычно в приборах работает схема ав- |
Рис. 3 |
|
томатической компенсации температу- |
||
|
ры свободных концов. Датчиком температуры «холодного спая» служит полупроводниковый диод, установленный рядом с присоединительным клеммником. Подключение ТП к прибору должно производиться с помощью специальных компенсационных (термоэлектродных) проводов изготовленных из тех же материалов, что и термопара. Допускается использовать провода из металлов с термоэлектрическими характеристиками, которые в диапазоне температур 0-100 С аналогичны характеристикам материалов электродов ТП. При соединении компенсационных проводов с ТП и прибором, необходимо соблюдать полярность.
3. Датчики с унифицированным выходным сигналом тока или напряжения. Многие датчики различных физических величин оснащены нормирующими измерительными преобразователями. Нормирующие преобразователи преобразуют сигналы с первичных преобразователей (манометров, дифманометров и т.д.) в унифицированный сигнал постоянного тока. Величина этого тока лежит в диапазонах 0-20 mА, 4-20 mА, 0-5 mА, а величина напряжения 0-10 mV, 0-100 mV. Диапазон выходного сигнала нормирующего преобразователя пропорционален значению физической величины, измеряемой датчиком и соответствует рабочему диапазону датчика,
указанному в его технических характеристиках.
II.Блок обработки данных – включает измерители входных сигналов, вычислители дополнительных параметров (разности, отношения и т.п.), фильтры для повышения помехоустойчивости, логические устройства, формирующие управляющие сигналы, кото-
рые затем подаются на выходные устройства.
III.Выходные устройства – предназначены для передачи выходного управляющего сигнала на исполнительные механизмы:
1.Выходные устройства ключевого типа:
электромагнитные реле;
транзисторная оптопара;
оптосимистор.
Выходные устройства ключевого типа используются для управления (вкл.-выкл.) нагрузкой либо непосредственно, либо через мощные управляющие элементы (пускатели, твердотельные реле, тиристоры, сими-
5
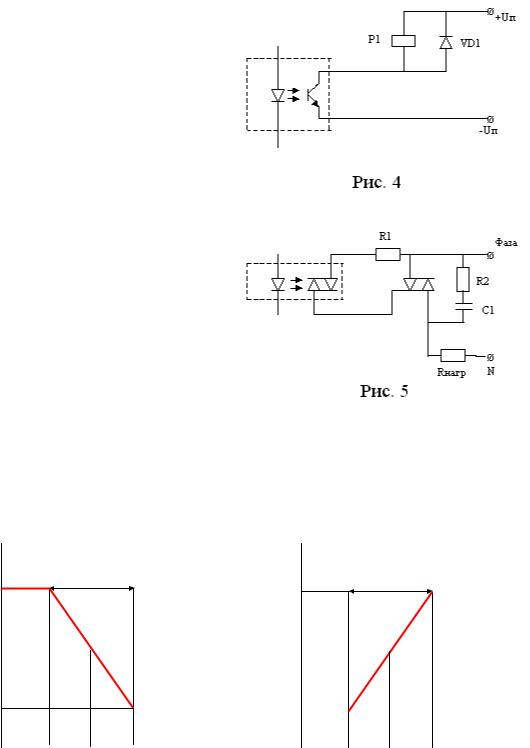
сторы). Транзисторная оптопара и оптосимистор имеют гальваническую развязку со схемой прибора. Транзисторная оптопара применяется, как правило, для управления низковольтным реле (до 50 В) (рис. 4). Оптопсимистор имеет внутреннюю схему перехода через ноль и включается в цепь управления мощного симистора через ограничивающий резистор R1 по схеме (рис. 5). Величина резистора определяет ток управления симистора. Для предотвращения пробоя тиристоров из-за высоковольтных скачков напряжения в сети к их выводам рекомендуется подключать фильтрующую RC цепочку.
2.Выходное устройство
аналогового типа представляет собой формирователь токовой петли 4-20 mA на активной нагрузке 200-800 Ом. Выходное устройство аналогового типа имеет гальваническую развязку от схемы прибора.
прямо пропорциональное |
|
обратно пропорциональное |
|||
|
регулирование |
|
регулирование |
||
Imax |
П=2Δ |
Imax |
П=2Δ |
||
|
|
|
|
|
|
Imin |
|
|
Imin |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Туст Туст Туст |
|
Туст Туст |
Туст |
|||
|
+Δ |
- |
|
+Δ |
|||
Рис. 6
|
|
6 |
|
|
|
|
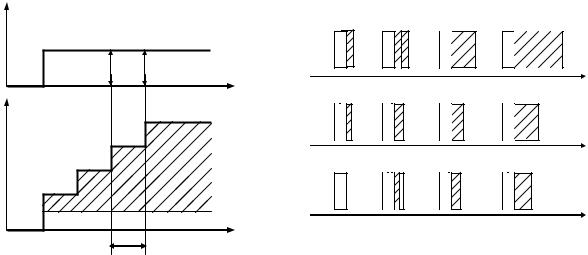
После |
рассмотрения |
блок-схемы |
|
Y |
Принцип ШИМ |
|
|
|
|
|
|
||
регулятора, рассмотрим принцип его рабо- |
|
|
|
|||
ты и законы регулирования. |
|
|
|
|
||
Регулятор вырабатывает у себя на |
|
|
|
|||
выходе сигнал Y, который направлен на |
|
|
|
|||
уменьшение отклонения E, т.е. разности |
|
|
|
|||
между контролируемой величиной и за- |
|
0 |
|
|||
данным значением. Этот сигнал плавно |
|
t |
||||
Реле |
||||||
меняется от 0 до 100 % и может подаваться |
|
|||||
|
|
|
||||
в виде тока или импульсов на исполни- |
|
|
|
|||
тельное устройство. Так как в качестве вы- |
|
|
|
|||
ходных устройств прибора используются, в |
|
|
|
|||
основном, реле, то переход от непрерывно- |
|
|
|
|||
го выходного сигнала Y к релейному (им- |
|
|
|
|||
пульсному) происходит с помощью ши- |
|
|
|
|||
ротно-импульсной модуляции (ШИМ). |
|
|
|
|||
Вычисленная величина выходного сигнала |
|
|
t |
|||
Y преобразуется в длительность релейных |
|
|
Вых. ШИМ сигнал |
|||
импульсов D, |
относительно |
периода их |
|
|
Рис. 7 |
|
следования, т.е. |
|
|
|
|||
|
|
|
|
|||
Y=D/ТСЛ 100% |
D=Y (ТСЛ/100%), |
|
||||
где D – длительность импульса; |
|
|
|
|||
ТСЛ – период следования импульсов. |
|
|
||||
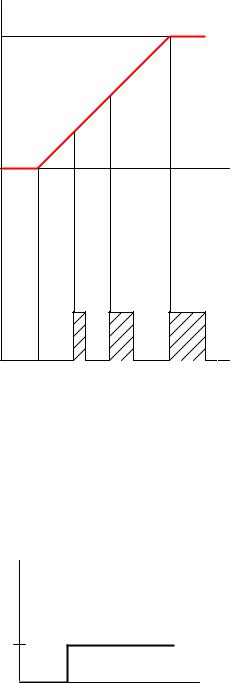
а) пропорциональное регулирование (П-закон). |
|
|||||
При П-законе регулирования выходной сигнал регулятора Y пропор- |
||||||
ционален величине отклонения E, т.е. |
|
|
|
|||
|
Y=(1/Xp) E 100%, |
|
E |
|
||
где, Xp – полоса пропорциональности, в |
|
|
||||
пределах которой справедлива эта формула. |
|
|
|
|||
Полоса |
пропорциональности Xp, как |
и |
|
|
||
отклонение E, выражается в единицах контро- |
10 |
|
||||
0 |
|
|||||
лируемого параметра и определяет величину |
t |
|||||
|
||||||
выходного сигнала Y. Чем шире полоса про- |
|
Рис. 8 |
||||
порциональности Xp, тем меньше величина вы- |
||||||
|
||||||
ходного сигнала Y при одном и том же отклонении E. Вне полосы пропор- |
||||||
циональности выходной сигнал Y равен 0 или 100%. |
|
|||||
При П-законе регулятор выдает импульсы, в которых присутствует |
||||||
только пропорциональная составляющая величины выходного сигнала. |
||||||
7
Y |
|
|
Xp = 10 |
|
Y |
|
|
|
|||
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Xp = 20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Xp = 100 |
1 |
2 |
|
3 |
||||
|
|
|
0 |
|
t |
1-Xp=10 |
|
|
|
||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||
Xp=10 |
|
2-Xp=20 |
|
|
|
||||||
|
|
|
|
|
|
|
3-Xp=120 |
|
|||
|
|
|
|
|
t |
|
|
|
|||
Xp=20
t
Xp=100
t
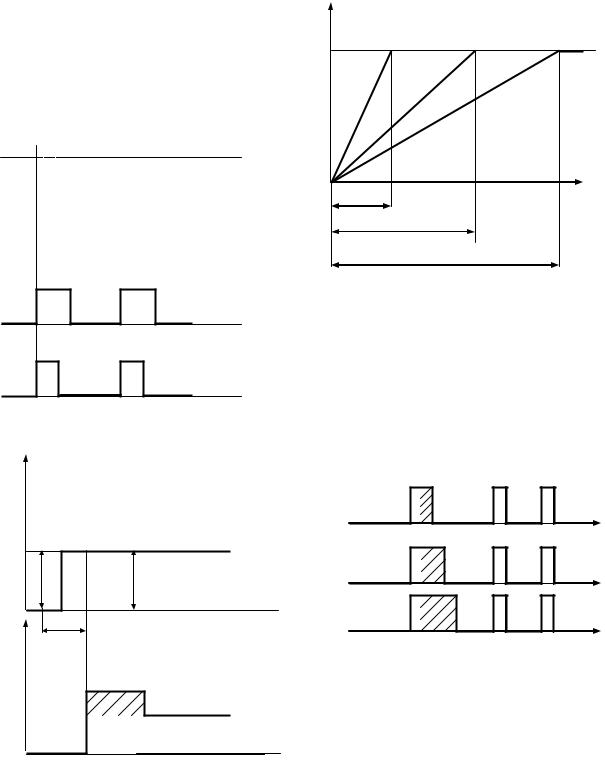
б) пропорционально-дифферинциальное регулирование (ПД-закон)
E
tg=4c
|
∆E |
0 |
t |
Y |
∆tизм |
tg=20c
tg=100c |
t
При работе регулятора в этом режиме величина выходного сигнала Y зависит не только от величины отклонения E, но и от скорости ее изменения. Так как регулируемая величина изменяется непрерывно, а периодически, то формула выходного сигнала имеет вид:
8
Y=(1/Xp) ((E+tg (∆E/∆tизм)) 100%,
где Xp – полоса пропорциональности; E – отклонение;
tg – постоянная времени дифференцирования;
∆E – разность между двумя соседними измерениями E; ∆tимз – время между двумя соседними измерениями; ∆E/∆t – скорость измерения отклонения.
Изменение выходного сигнала регулятора Y при ступенчатом изменении отклонения показано на рисунке. В первый период после ступенчатого изменения отклонения Е, регулятор выдает управляющий импульс, в котором присутствует пропорциональная составляющая, вызванная изменением Е (заштрихованная часть первого импульса). Величина дифференциальной составляющей зависит от величины Е и коэффициента tg. В последующих импульсах присутствует только пропорциональная составляющая, т.к. нет изменения E.
в) пропорционально-интегральное регулирование (ПИ-закон)
При работе регулятора в этом режиме величина выходного сигнала Y зависит, как от величины отклонения E, так и от времени его существования. Так как регулируемая величина измеряется не непрерывно, а периодически. Формула выходного сигнала имеет вид:
E
|
Ej-1 Ej |
tи=1с |
|
|
|
|
|
t |
Y |
|
t |
|
|
|
|
|
tи=2с |
|
|
t |
|
|
tи=3с |
0 |
|
t |
|
t |
|
|
|
tизм
Рис. 9
n j
Y=(1/Xp) (Ej+(1/τu) En ) 100%
n 0
где Xp – полоса пропорциональности; Ej – отклонение;
9
τu –постоянная времени интегрирования;
n j
En – разность между двумя соседними измерениями E.
n 0
Из рисунка видно, что в первый момент времени, когда нет отклонения (E=0), нет и выходного сигнала (Y=0). С появлением отклонения Ej появляются импульсы, длительность которых постепенно увеличивается. В импульсах присутствует пропорциональная составляющая, которая зависит от величины E (не заштрихованная часть импульсов) и интегральная составляющая (заштрихованная часть). Увеличение длительности импульсов происходит за счет роста интегральной составляющей, которая зависит от отклонения E и коэффициента Ru.
г) пропорционально-интегрально-дифферинциальное регулирование (ПИД-закон).
Для этого закона выходной сигнал регулятора Y изменяется по формуле:
n j
Y==(1/Xp) (Ej+tg (∆E/∆tизм)+(1/τu) En ) 100%
n 0
где все составляющие формулы описаны выше.
В выходных импульсах присутствуют все три составляющие: пропорциональная, дифференциальная, интегральная, которые изменяются по законам описанным выше. ПИД-регулирование является наиболее эффективным из всех описанных.
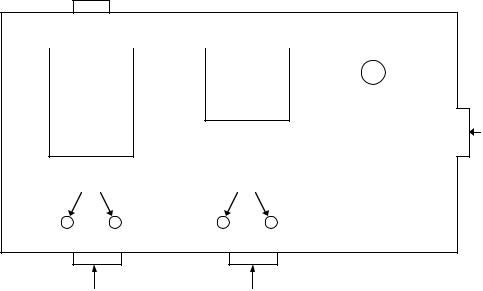
2. Краткое описание лабораторного стенда.
Выход нагрузки ПИД регулятора
|
|
|
|
|
Нагрузка |
|
|
|
|
|
|
|
|
|
|
П |
|
|
Пид |
|
регулятор |
П-регулятора |
|
регулятор |
|
|
|
||
Главный
выключатель
Датчик
Датчик |
Датчик |
||
|
|
|
|
|
|
|
|
Выключатель |
Выключатель |
|
|
ПИД-регулятора |
П-регулятора |
|

10
Стенд для проведения лабораторной работы представляет собой автономный настольный блок, позволяющий ознакомиться с основными принципами работы регуляторов.
На лицевую панель вынесены лицевые части регуляторов: в левой части ПИД-регулятор, в правой части П-регулятор, гнезда подключения термосопротивлений (магазина сопротивлений), имитатора нагрузки П- регулятора (лампа накаливания), мнемосхема с двумя контрольными точками и общей точки П-регулятора.
На задней стороне стенда расположены: ввод шнура питания, сетевые предохранители, клемма заземления стенда и розетка, позволяющая подключать нагрузку к ПИД-регулятору.
На правой стенке расположен сетевой выключатель На передней панели расположены два выключателя регуляторов. Внимание!!!
Стенд должен быть заземлен! При включенном стенде в розетке присутствует сетевое напряжение опасное для жизни.
Категорически запрещается включать регуляторы без датчиков или без магазина сопротивления, на котором должно быть установлено 100 Ом.
3. Проведение работы
Настоящий стенд позволяет провести две работы. Правая часть стенда позволяет получить представление о работе П – регулятора, левая часть позволяет на практике увидеть работу регулятора.
|
|
|
|
|
Нагр |
|
|
П |
|
|
П |
|
|
Датчик |
И |
220v |
Датчик |
|
L1 |
|
Д |
|
|
||||
|
|
|
|
|
|
|
|
регулятор |
|
|
Регулятор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5А |
|
|
|
|
|
|
|
Пр1 L2 |
|
B2 |
|
|
В3 |
|
220v |
|
|
|
|
|
5А |
220v |
|
|
|
|
|
|
|
|
|
|
|
|
Пр2 |
В1 |