

4336
.pdf
|
|
|
|
31 |
|
|
|
|
В |
|
0 |
1 |
|
|
|
|
А |
С |
|
|
|
|
|
|||
А |
|
|
|
С |
|
|
||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
|
|
45° |
|
|
|
60° |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωОА |
О |
|
|
|
ωОА |
|
В |
|
|
|
|
|
О |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
В |
|
|
С |
|
|
|
С |
|
|
|
ωОА |
|
|
|
|
|
||
|
В |
|
ωОА |
|
|
|
|
|
|
|
|
А |
|
|
|
||
|
30° |
30° |
|
45° |
|
|
||
О |
|
О |
|
|
||||
|
|
|
|
|
|
|
||
4 |
ωОА |
О |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
5 |
|
|
С |
|
D |
|
|
120° |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
А |
30° |
|
|
В |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
ωОА |
|
|
|
|
|
|
|
В |
|
О |
90° |
|
90° |
О1 |
|
|
|
|
|
7 |
|
В |
|
О1 |
|
|
|
|
|
|
|
|
|
|
А |
В |
6 |
|
|
С |
|
|
|
|
|
|
|
|
|||
|
С |
|
|
|
30° |
|
|
|
ωОА |
|
|
А |
|
|
|
|
|
О |
60° |
60° |
О1 |
ωОА |
|
|
|
|
О |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
8 |
|
|
|
А |
|
В |
С |
|
|
||
|
90° |
|
R |
|
|
|
|
|
ωОА |
|
|
О |
|
|
|
|
32 |
|
|
|
|
А |
9 |
|
|
|
|
|
ωОА |
С |
|
|
|
R |
|
|
|
|
|
О |
45° |
45° |
О1 |
|
|
|
В |
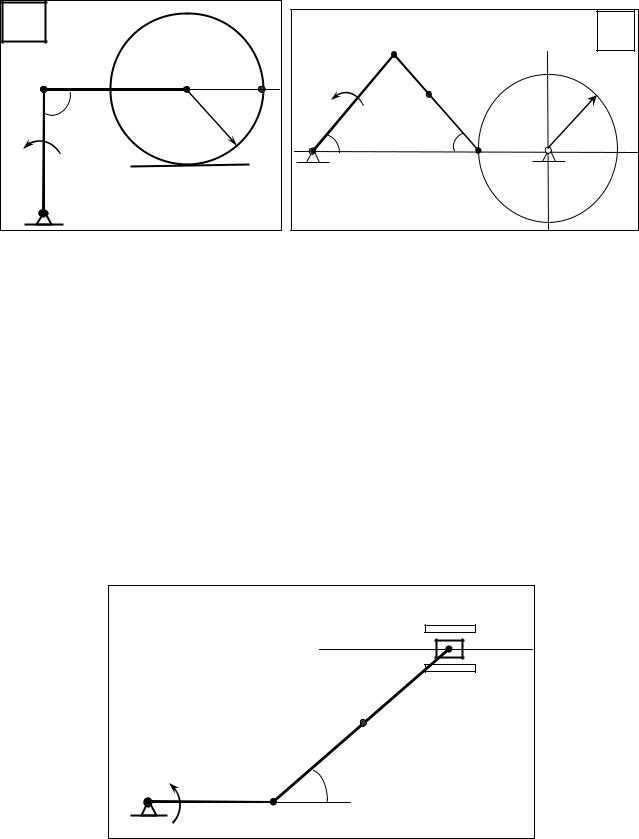
Указания. Задача К4 на исследование плоского движения тела. При ее решении скорости точек механизма и угловые скорости звеньев определяются с помощью теоремы о проекциях скоростей двух точек тела и с помощью мгновенного центра скоростей, применяя эти понятия к каждому звену механизма в отдельности. Учесть, что в вариантах 0 – 4 ползун совершает поступательное движение вдоль направляющих, в вариантах 5 – 7 звено О1В совершает вращательное движение вокруг точки О1, в варианте 8 колесо совершает плоское движение, в варианте 9 колесо вращается вокруг точки О1. Прежде чем производить расчеты, следует изобразить механизм, с учетом длины звеньев. Углы указаны на чертежах.
|
ПРИМЕР ВЫПОЛНЕНИЯ ЗАДАНИЯ К4 |
|
|
|
В |
|
|
С |
|
ωОА |
45° |
|
О |
А |
|
|
|
|
|
Рис. К4.1 |
ДАНО: |
OA = 20 см, AB = 35 см, ωOA = 2 рад/ c . |
|
33
НАЙТИ: Для заданного положения механизма (рис. К4.1)
1.скорость точки А;
2.положение мгновенного центра скоростей и угловую скорость звена АВ;
3.скорости точек В и С (средняя точка звена АВ);
Мгновенный центр скоростей и векторы скоростей точек изобразить на схеме механизма.
РЕШЕНИЕ В кривошипно-ползунном механизме кривошип ОА совершает враща-
тельное движение, шатун АВ – плоское и ползун В – поступательное. Вычисляем модуль скорости точки А при заданном положении механизма
vA = ωOA OA = 2 20 = 40 см с.
с.
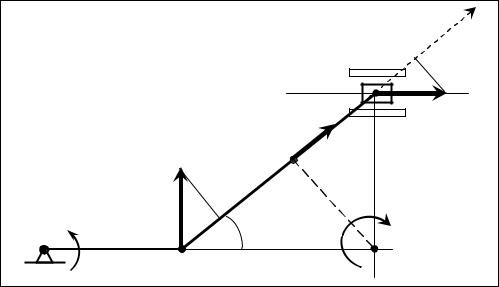
Вектор скорости точки А перпендикулярен кривошипу ОА. Скорость ползуна В направлена по горизонтали. Для ее определения воспользуемся мгновенным центром скоростей. Мгновенный центр скоростей РАВ шатуна АВ находится в точке пересечения перпендикуляров, проведенных из точек А и В к их скоростям (рис. К4.2).
Известно, что
vA = ωAB APAB , vB = ωAB BPAB , vC = ωAB CPAB
где ωAB – угловая скорость звена АВ.
Расстояния АРАВ, ВРАВ, СРАВ определим из треугольников АВРАВ, АСРАВ
AP |
= BP |
= AB cos 45o = 35 0,7 = 24,5 см, |
|
|
|
|||
AB |
AB |
|
|
|
|
|
|
|
CP |
= BP |
cos 45o |
= 24,5 cos 45o =17,15 см. |
|
|
|
||
AB |
AB |
|
|
|
|
|
|
|
Так как скорость vA |
известна, то ωAB = |
vA |
= |
40 |
|
=1,64 рад/ с, |
||
|
24,5 |
|||||||
|
|
|
|
APAB |
|
|||
следовательно
vB =1,64 24,5 = 40 см/ c , vC =1,64 17,15 = 28,13 см/ c .
Вектор vC направлен перпендикулярно СРАВ в сторону вращения звена
АВ, т.е. по часовой стрелке (рис. К4.2).
|
|
|
34 |
|
Для ПРОВЕРКИ определим скорость точек В и С с помощью теоремы о |
||||
равенстве проекций скоростей точек на ось проведенную через эти точки. Для |
||||
этого проведем ось x вдоль АВ от А к В. Получим |
|
|||
ПРx vA = ПРx vB = ПРx vC , |
|
|||
или, как видно из рисунка К4.2, |
|
|
||
vA cos 45o = vB cos 45o = vC , |
|
|||
откуда vB = vA = 40см/ c , |
vC = vA cos 45o = 40 0,7 = 28 см/ c . |
|||
Таким образом, найденные скорости удовлетворяют этой теореме. |
||||
Мгновенный центр скоростей и векторы скоростей точек указаны на рисунке |
||||
К4.2. |
|
|
|
|
|
|
|
|
х |
|
|
|
|
vB |
|
vA |
С |
vC |
|
|
|
|
||
|
ωОА |
|
45° |
ωАВ |
|
О |
А |
|
РАВ |
|
|
|
||
|
|
|
Рис. К4.2 |
|
ОТВЕТ: |
vB = vA = 40см/ c , |
vC = 28 см/ c , ωAB =1,64 рад/ с. |
||
35
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Основная литература
1.Тарг, С. М. Краткий курс теоретической механики [Текст] : учебник /
С. М. Тарг. – М. : Высш. шк., 1998. – 416 с.
2.Яблонский, А. А. Курс теоретической механики [Текст]. В 2 ч. Ч. 1. Статика. Кинематика : учеб. пособие для втузов / А. А. Яблонский, В. М. Никифо-
рова. – М. : Высш. шк, 1984. – 343 с.
Дополнительная литература
3.Бать, М. И. Теоретическая механика в примерах и задачах [Текст]. В 2 т. Т. 1 : учеб. пособ. для втузов / М. И. Бать, Г. Ю. Джанелидзе, А. С. Кельзон. – 7-е изд., доп. – М. : Наука, 1975. – 512 с.
4.Бать, М. И. Теоретическая механика в примерах и задачах [Текст]. Т. 2 : учеб. пособ. для втузов / М. И. Бать, Г. Ю. Джанелидзе, А. С. Кельзон. – 7-е
изд., доп. – М. : Наука, 1975. – 624 с.
5.Сборник заданий для курсовых работ по теоретической механике [Текст] : учеб. пособ. для техн. вузов / под ред. А. А. Яблонского. – 5-е изд., исп. – М. : Интеграл-Пресс, 2000. – 384 с.
36
Ольга Анатольевна Смотрова Людмила Михайловна Кречко Оксана Борисовна Иевлева
Т Е О Р Е Т И Ч Е С К А Я М Е Х А Н И К А Раздел КИНЕМАТИКА
Методические указания и контрольные задания для студентов факультета заочного обучения
специальности 150200 (190601) – Автомобили и автомобильное хозяйство
Подписано в печать 25.12.07. Формат 60х84 1/16. Объем 2,25 п. л. Усл. печ. л. 2,1. Уч.-изд. л. 2,21. Тираж 250 экз. Заказ
ГОУ ВПО «Воронежская государственная лесотехническая академия»
РИО ГОУ ВПО «ВГЛТА». УОП ГОУ ВПО «ВГЛТА»
394613, г. Воронеж, ул. Тимирязева, 8