

4297
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Воронежская государственная лесотехническая академия
Проектирование самоходных лесных машин
МЕТОДИЧЕСКИЕ УКАЗАНИЯ к лабораторно-практическим занятиям для студентов
лесомеханического факультета по специальности 170400 – Машины и механизмы лесного комплекса
Воронеж 2004

2
УДК 630*377.4
Попиков П.И. Проектирование самоходных лесных машин. Методические указания к лабораторным работам для студентов лесомеханического факультета по специальности 170400 – Машины и механизмы лесного комплекса / П.И. Попиков, Л.Д. Бухтояров, - Воронеж:ВГЛТА, 2004, - 32 с.
Печатается по решению редакционно-издательского комитета ВГЛТА
Рецензент д-р. техн. наук, проф. К.Р. Казаров
Научный редактор д-р. техн. наук. проф. И.М. Бартенев.
Попиков Петр Иванович Бухтояров Леонид Дмитриевич
Методические указания к лабораторно-практическим занятиям по курсу Проектирование самоходных лесных машин для студентов лесомеханического факультета специальности 170400 - Машины и механизмы лесного комплекса
Редактор С.Г. Герасименко
Подписано в печать 18.03.04 Формат 60×84 1/16 Бумага оберточная. Объем 2.1 п.л. Усл. п.л. 1, 92. Уч. – изд. л. 2,5. Тираж 100.
Воронежская государственная лесотехническая академия РИО ВГЛТА. УОП ВГЛТА: 394613, Воронеж, ул. Тимирязева, 8

3
ЗАНЯТИЕ №1. ОПРЕДЕЛЕНИЕ СИЛОВОГО ВЗАИМОДЕЙСТВИЯ КОЛЕСНОЙ ТРАНСПОРТНОЙ СИСТЕМЫ С ПАЧКОЙ ДЕРЕВЬЕВ С ПРИМЕНЕНИЕМ ЭВМ
1.1 Цель работы.
Определение влияния методов трелевки на конструктивные параметры транспортной системы.
1.2Оборудование и приборы. ЭВМ и чертежные инструменты.
1.3Исходные данные.
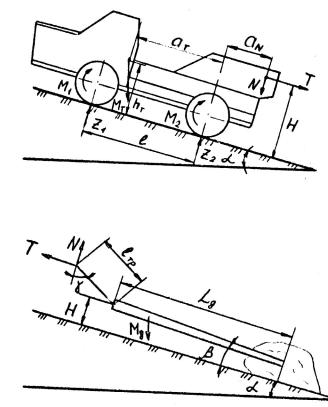
1.3.1. Расчетные схемы трелевки деревьев в полуподвешенном состоянии (рис. 1.1).
1.3.2 Исходные данные по заданию преподавателя. 1.4 Расчетные зависимости.
1.4.1 На основании расчетной схемы (рис. 1.1б) определяются технологические силы T и N из условия равновесия пакета [1]
|
|
f |
|
cosα + [(1− n)ctgγ − |
n |
|
]sinαg |
|
||||||||||||||||||||
|
2 |
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f2 |
|
|
|
|
|
|
|
|||||
|
T = M g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
(1.1) |
|||||
|
|
|
|
|
|
|
|
|
f2 ctgγ + 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
N = M g |
f2 cosα +[n( f2 ctgγ +1)sinαg |
; |
|
|
(1.2) |
||||||||||||||||||||||
|
|
|
|
|
|
|
f2 ctgγ +1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
sin γ = |
1 |
(1± |
|
|
|
); |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
1+ AB |
|
|
|
|
|
|
(1.3) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
A = |
Lg (1− n) |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.4) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
lтр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
1 |
|
|
|
|
Lg |
|
|
n |
|
|
n |
|
|
2 |
|
|
||||||
|
B = |
A − |
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
, |
|
(1.5) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
A |
|
(1− n)Lтр |
f |
2 |
|
|
|
|
L |
g |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где Mg |
– масса пакета хлыстов, кг; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
f2 |
– коэффициент сопротивления волочению пакета; |
|
||||||||||||||||||||||||||
4
n– коэффициент, учитывающий часть силы тяжести пакета, приходящийся на тягач (при трелевке комлями вперед n=0,67, при трелевке вершинами вперед n=0,33);
lтр –длина троса, м; lg – длина пакета, м; Н –высота трелевочной арки, м;
g–ускорение свободного падения, м/с;
1.4.2 Определяем суммарный реактивный момент:
M p |
= M1 + M2 = Zk [(N + Mт cosαg) f1 + T + Mт sinαg], |
(1.6) |
где |
Мт– эксплуатационная масса машины, кг; |
|
|
f1 – коэффициент сопротивления движению машины; |
|
|
Zk– радиус колеса, м; |
|
М1; М2 – реактивные моменты на передних и задних колесах, Н м.
а)
б)
Рис. 1.1 Расчетные схемы трелевки деревьев транспортной системой: а – схема сил, действующих на тягач; б – схема сил, действующих на трелюемый пакет
5
1.4.3 Определяются опорные реакции на передние и задние колеса Z1 и
Z2:
Z |
|
= |
1 |
{M |
|
g[a cosα − (h |
− Z |
) sin α]−T(H − Z |
) − Na |
|
− Mp}; (1.7) |
|
1 |
|
|
|
|||||||||
|
|
l |
т |
т |
т |
k |
k |
|
N |
|
||
|
|
|
|
|
|
Z2 |
= M |
т cosαg + N − Z1 , |
|
|
(1.8) |
|
где значения l, aт, aN, H ясны из рис. 1.1.
Суммарное давление на грунт от передних и задних колес тягача:
Z1n |
= Z1 |
+ 2m1 |
cosαg; |
(1.9) |
|
Z2n |
= Z2 |
+ 2m2 |
cosαg, |
||
|
где 2m1 и 2m2 – массы двух колес передней и задней оси.
1.4.4 Заносят данные в программу «Оценка компоновки технологического оборудования на базовой машине», текст приведён в Приложении 1, получают значения максимально допустимого угла подъема αmax и наибольшей нагрузки на рейс с учетом заданных ограничений для различных способов трелевки:
Z1n ≥ 0; Z2n ≤ 2Pдоп , (1.10) где Рдоп – допустимая нагрузка на одну шину заднего места.
Кроме того, получают зависимости от конструктивных параметров:
Z1 = f (aN ,H); |
Z2 = f (aN ,H); |
(1.11) |
1.5 Порядок выполнения работы. |
|
|
1.5.1 Введите исходные данные по заданию преподавателя: |
||
Коэффициент сопротивления волочения пакета f2=F |
0,5…0,8 |
|
Угол наклона пути АО |
|
0…0,6 рад |
Длина троса lтр = L1 |
|
0,4…0,7 м |
Коэффициент n = NO |
|
|
при трелевке комлями вперед, |
0,67 |
|
при трелевке вершинами вперед |
0,33 |
|
Радиус колеса Zk = R |
|
0,5…0,8 |
Эксплуатационная масса машины Мт =М4 |
2000…12000 кг |
|
6 |
|
Коэффициент сопротивления движению машины |
0,12…0,15 |
База машины l = LO |
2,86…3,2м |
Расстояние aт = А2 |
1,5…1,8 м |
Расстояние aN = A1 |
0,2…0,4 м |
Высота арки Н |
1,8…2,1 м |
Масса передних колёс m1 = M1 |
200…500 кг |
Масса задних колёс m2 = M2 |
200…500 кг |
Допускаемая нагрузка на шины Рдоп = Р |
50000…80000 Н |
Длина деревьев Lд = L2 |
20…35 м |
Высота центра тяжести тягача hт = Н1 |
1…1,6 м |
Масса пакета хлыстов |
_____ кг |
Нажмите затем на кнопку Расчёт и получите результат расчёта: |
|
Сила Т |
_________ H |
Сила N |
_________ H |
Угол сигма |
_________ град |
Суммарный реактивный момент Мр |
_________ H м |
|
|
Опорные реакции на передние колеса Z1 |
_________ |
Опорные реакции на задние колеса Z2 |
_________ |
Суммарное давление на грунт: |
|
передних колес Z1п |
_________ H |
задних колес Z2п |
_________ H |
Нажав на кнопку Распечатать распечатайте результат расчёта
1.5.2Проводят аналогичные расчеты на ЭВМ при трелевке вершинами вперед и по полученным результатам выбирают метод трелевки.
1.5.3Для выбранного метода определяют зависимости опорных реакций колес Z1n и Z2n от конструктивных параметров технологического оборудования:
|
7 |
|
|
Z1 = f (aN , H); |
Z2 = f (aN , H); |
при α = αmax и Mg = Mg(max). |
|
|
|
Устанавливается их рациональное соотношения по условию (1.11). |
|
|
1.5.4 При компоновке гидроманипулятора на тракторе суммарный ре- |
|
активный момент определяется по следующей формуле |
||
М Р′ |
= М1 + М 2 = Zк [(N + MТ cosαg) f1 + T + MТ |
sinαg] + Li N + HiT (1.12) |
где |
Li – вылет манипулятора; |
|
|
Hi – высота расположения центра захватного устройства манипулятор. |
|
|
Данные расчёты проводятся по аналогичной методике для тягача с пач- |
|
ковым захватом.
1.6 Составление отчета.
1.6.1Начертить схемы в масштабе по выбранному варианту трелевки.
1.6.2Привести расчетные формулы с пояснениями входящих в них ве-
личин.
1.6.3Приложить результаты расчетов в виде распечаток на ЭВМ.
1.6.4Построить графики зависимостей опорных реакций от конструктивных параметров.
1.6.5Дать анализ использования метода трелевки и влияния конструктивных параметров технологического оборудования.
8
ЗАНЯТИЕ №2. СОСТАВЛЕНИЕ КИНЕМАТИЧЕСКОЙ И РАСЧЕТНОЙ СХЕМ ЗАХВАТА МОДЕЛИ, И ПРОЕКТИРОВАНИЕ НОВОГО ЗАХВАТА ДЛЯ БЕСЧОКЕРНОЙ ТРЕЛЕВКИ ДЕРЕВЬЕВ
2.1 Цель работы.
2.1.1Получить практические навыки составления кинематических схем захватных устройств по моделям.
2.1.2Спроектировать захватное устройство по расчетным данным лабораторной работы №1 для транспортной системы.
2.2 Оборудование и приборы.
2.2.1Опытный образец захватного устройства УБТ-0,8, установленный не действующий лабораторный стенд.
2.2.2Измерительные инструменты: слесарная линейка, штангенцир-
куль.
2.2.3Чертежные инструменты. 2.3 Исходные данные.
2.3.1Параметры захвата-модели.
2.3.2Исходный и расчетные данные для транспортной системы из ра-
боты №1.
2.4 Порядок выполнения работы.
2.4.1Изучить конструкцию действующего стенда захвата-модели и инструкцию по технике безопасности.
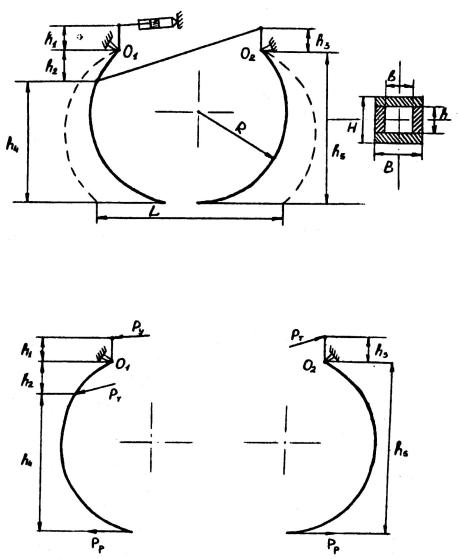
2.4.2Измерить основные геометрические размеры захвата-модели согласно обозначениям на рис. 2.1.
2.4.3Вычертить в масштабе кинематическую схему захвата с нанесением всех размеров.
2.4.4Составить расчетную схему захвата, для чего приложить действующие активные и реактивных силы отдельно и правой и левой челюсти (рис. 2.2.).
9
Рис. 2.1 Кинематическая схема захвата
Рис. 2.2 Расчетная схема захвата
2.4.5 Определить следующие силы: Усилие в гидроцилиндре
|
|
P = |
|
πД 2 |
|
|
|
P |
ц |
, |
|
|
|
4 |
|||
|
|
ц |
max |
|
|
где |
Pmax – максимальное давление рабочей жидкости |
||||
|
вании предохранительного клапана в гидросистеме; |
||||
Pmax |
= 13,5 МПа; |
|
|
|
|
|
∑ M 01 |
= Pц h1 − Pт h2 + Pр h4 = 0; |
|||
|
∑ M 02 |
= −Pт h3 + Pр h5 = 0. |
|||
(2.1)
при срабаты-
(2.2)

|
|
|
10 |
|
|
|
|
|
|
|
Реактивные силы |
|
|
|
|
|
|
|
|
|
|
Pp = |
|
|
Pц h1 |
|
|
|
, |
(2.3) |
||
(h |
4 |
+ h h |
2 |
) / h |
3 |
|||||
|
|
5 |
|
|
|
|
||||
Усилие в тяге согласования |
|
|
|
|
|
|
|
|
|
|
|
P |
= |
Pp h5 |
. |
|
|
(2.4) |
|||
|
|
|
|
|||||||
|
|
т |
|
h3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2.4.6Определить изгибающие моменты в опасных сечениях челюстей,
ипо максимальному определить расчетный момент сопротивления Wp и сравнить его с фактическим Wф:
Wp = |
M |
из |
(max) |
, |
|
[G]из |
|||
|
|
|
||
где [G]из – допустимое направление изгиба [G]из = 80…120 МПа; Mиз(max) = Pph5;
W = |
BH 3 |
− bh3 |
||||
|
|
|
; |
|||
|
|
|
||||
|
ф |
|
|
6H |
||
|
|
|
|
|
|
|
запас прочности |
|
|
|
|
|
|
K |
|
= |
Wф |
. |
|
|
p |
|
|
|
|||
|
|
Wр |
|
|
||
|
|
|
|
|
||
(2.5)
(2.6)
(2.7)
(2.8)
2.4.7 Определить поперечные сечения тяги согласования и пальцев
шарнирных соединений и сравнить их с фактическими: |
|
|||
P = |
Pт |
|
; |
(2.9) |
[G] |
|
|||
т |
р |
|
||
d |
|
= |
|
4Pт |
|
. |
(2.10) |
n |
|
|
|||||
|
|
[τ ]срπ |
|
||||
|
|
|
|
||||
Допускаемые напряжения на разрыв и срез принять в пределах [σ]p = 200...250 МПа, [σ]ср = 80...120 МПа.
2.4.8 По исходным данным работы №1 выбираем по варианту для бригады заданную массу пакета Mg, технологические силы T и N, длину деревьев Lg, и определяем основные геометрические параметры проектируемого захвата, и строим кинематическую схему: