

4062
.pdf21
3) силы вредных сопротивлений, на которые затрачивается дополнительная работа сверх той, которая необходима для преодоления сил полезного сопротивления (силы трения в узлах машины).
Следует отметить некоторую условность в разделении сил на движущие и силы сопротивления. Например, при подъеме звеньев силы их тяжести являются силами сопротивления, а при опускании – движущими.
Среди сил, действующих на механизм, следует определить:
1)силы тяжести отдельных звеньев и машины в целом;
2)силы упругости – при деформировании звена под действием движущих сил происходит накопление энергии, при снятии нагрузки происходит переход потенциальной энергии деформируемого звена в кинетическую энергию, распрямляясь, звено движет соприкасающиеся звенья машин;
3)силы инерции, а также моменты от сил инерций. Силы инерции возникают при ускоренном (замедленном) движении звеньев.
Силой инерции называют геометрическую сумму сил противодействия
движению звена.
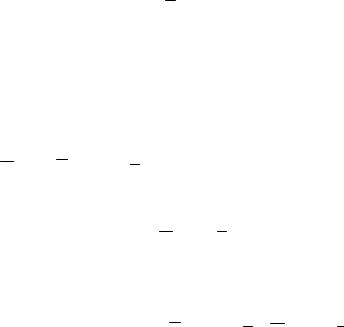
Рассмотрим силы инерции в зависимости от характера движения звена: 1) звено движется поступательно (рис 3.1а)
|
|
|
(3.1) |
Pu = −m аs , |
|||
минус показывает, что Рu направлена противоположно аs.
а |
б |
в |
г |
д
Рис. 3.1 Частные случаи движения звеньев механизма
22
2)звено неравномерно вращается вокруг оси, проходящей через центр тяжести ω≠const; Ри = 0 , так как аs=0 (рис. 3.1 б)
|
|
|
|
, |
(3.2) |
|
М |
||||||
|
= −Js ε |
|||||
Мu - момент от пар сил инерции [H·м]; Js – момент инерции звена [кг.м2];
ε - угловое ускорение [рад/с];
3)звено равномерно вращается через ось, не проходящую через центр тяжести (рис. 3.1 в)
Ми = 0 ; Pu = −m аs ;
4)звено равномерно вращается вокруг оси, проходящей через центр
тяжести ω=const; Ми = 0 ; Ри = 0 , так как при ω=const ε=0 Мu=0;
аs=0 Рu=0 (рис. 3.1 г);
5) звено совершает сложное плоскопараллельное движение (рис. 3.1 д) Pu = −m аs ;М = −Js ε .
Определение уравновешивающей силы методом построения планов сил
Всякий механизм, обладающий одной степенью подвижности и находящийся под действием заданной системы внешних сил, можно считать находящимся в равновесии, если к одному из его звеньев приложить уравновешивающее эту систему усилие. Уравновешивающим силовым фактором может быть либо некоторая условная уравновешивающая сила Ру, либо уравновешивающая пара сил с моментом Му. Уравновешивающее усилие считают приложенным либо к звену, получающему энергию извне (технологические машины), либо к звену отдающему энергию (в двигателях). Звено к которому прикладывается уравновешивающее усилие, называется ведущим или начальным.
При определении Ру удобно все силы, действующие на механизм, заменить одной силой Рпр, приложенной к ведущему звену (кривошипу) в точке его присоединения к остальному механизму. Такая заменяющая сила представляет собой реакцию в кинематической паре со стороны групп Ассура на кривошип.
Для того чтобы система находилась в равновесии, такую заменяющую приведенную силу Рпр должна уравновешивать сила Ру. Уравновешивающей называется такая сила, работа которой на рассматриваемом перемещении по величине равна сумме работ всех сил, действующих на механизм. По направлению Ру и Рпр- противоположны.
Для определения приведенной силы необходимо узнать реакции в тех кинематических парах, где присоединяются группы Ассура к ведущему звену. Решение задачи о реакциях следует начинать с наиболее удаленной от ведущего звена группы. Затем переходить к следующей по направлению к ведущему звену. При расчете последующей группы, помимо действующих на
23 |
|
|
нее сил надо учитывать и реакции со стороны |
ранее |
рассмотренной |
группы. Последним рассматривается механизм первого класса.
Последовательность силового анализа механизма:
1.Произвести структурный анализ механизма.
2.Произвести кинематический анализ.
3.Найти силы тяжести, силы инерции, момент от пар сил инерции, силу давления газов.
4.К наиболее удаленной от механизма первого класса группе Ассура приложить найденные силы и реакции.
5.Найти реакции с помощью многоугольника сил.
6.Выполнить действия по пунктам 4-5 для остальных групп Ассура.
7.Произвести анализ механизма первого класса, найти реакции, урав-
новешивающую силу и уравновешивающий момент.
При силовом анализе механизма используется принцип Даламбера: систему можно рассматривать без нарушения движения или покоя, если
при отсоединении от механизма, приложить к ней все силы, включая силы инерции и силы реакции в разрушенных шарнирах.
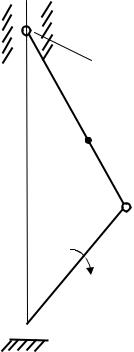
Произведем силовой анализ кривошипно-ползунного механизма двигателя внутреннего сгорания для заданного положения (рис. 3.2).
|
|
|
|
|
|
|
Произведя структурный |
|
|
|
|
|
|
|
анализ, установим, что меха- |
|
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
низм состоит из механизма пер- |
|
|
|
|
|
|
вого класса, содержащего зве- |
|
|
|
|
3 |
|
нья 0; 1 и группы Ассура II |
||
|
|
|
|||||
|
|
|
|
|
|
|
класса 2-го порядка, включаю- |
2 |
|
щей звенья 2; 3. Число степеней |
|||||
|
|
|
|
|
S2 |
|
подвижности механизма – еди- |
|
|
|
|
|
|
ница (W=1). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Строим план скоростей |
|
|
|
|
|
|
А |
(рис. 3.3) и ускорений (рис. 3.4). |
|
|
|
|
|
|
Методика построения плана |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω1 |
|
скоростей и ускорений подроб- |
|
|
|
|
|
|
|
но рассматривалась в предыду- |
1 |
|
щем разделе. |
|||||

 О
О
Рис. 3.2 Кинематическая схема кривошипно-ползунного механизма ДВС
Определение силы дав-
ления газов на поршень
Индикаторное давление газов(Pi ) в цилиндре двигателя
определяется по индикаторной диаграмме с использованием циклограммы работы двигателя.

24
Р
Площадь поперечного сечения цилиндров
|
|
|
VА |
π d |
2 |
|
|
|
|
|
F = |
, м2 . |
(3.3) |
||
|
|
|
|
|
|||
VВ |
B |
4 |
|
|
|
||
а |
|
|
|
||||
|
|
|
|
||||
Сила давления газов на поршень В
S2
VВА
в
Рис. 3.3 План скоростей
PДB = PiB FB , Н. |
(3.4) |
Определение результирующих сил инерции
Сила инерции шатуна 2 определятся по формуле |
|
||||||||
|
|
|
|
|
|
|
|
|
(3.5) |
|
Ри2 = −m2 aS 2 , Н. |
||||||||
Сила инерции поршня 3 определятся |
|
||||||||
|
|
|
|
|
|
(3.6) |
|||
|
|
Pи3 = −m3 aB , Н. |
|||||||
Знак “-“ в формулах показывает, что направление векторов сил инерций и соответствующие им вектора ускорений противоположно направлены.
|
|
|
|
|
|
|
|
|
|
|
Силу инерции кривошипа не определяем, т.к. он |
|||||||
|
|
|
|
|
|
|
|
П |
уравновешен и центр масс его находится на оси |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
вращения О и не имеет ускорения. |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Момент пар сил инерции шатуна 2 определятся |
|||||||
|
|
|
|
|
|
|
|
|
|
|
по формуле |
|
|
|
|
|
|
|
|
|
|
а |
А |
|
|
|
|
|
|
и2 = − JS 2 |
|
2 , Н м, |
(3.7) |
||||
|
|
|
|
|
|
|
M |
ε |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
где JS2 ; - момент инерции шатуна 2; |
|||||||
|
|
|
|
аS2 |
|
|
|
|
||||||||||
|
|
|
|
|
аB |
|||||||||||||
а |
|
|
|
ε2 ;- угловое ускорение шатуна 2. |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
S2 |
|
|
|
|
Знак ″-″ в формуле показывает, что направление |
||||||||||
|
|
|
|
в |
момента пары сил инерции и углового ускорения |
|||||||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
n |
|
|
|
|
– противоположны. |
|
||||||||||
а |
|
|
|
|
|
|||||||||||||
ВА |
|
τ ВА |
Угловое ускорение определятся по формуле |
|||||||||||||||
а |
||||||||||||||||||
|
|
|
|
n |
|
|
|
|
ε 2 |
= |
aτBA |
,c−2 . |
(3.8) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lAB |
|
|||
Рис.3.4 План ускорений |
Момент Mи2 |
удобно представить в виде па- |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ры сил Pми2 , приложенных в точках А и В шатуна |
|||||||
|
|
|
|
|
|
|
|
|
|
|
2, перпендикулярно ему. Сила Pми2 |
прикладыва- |
||||||
ется в соответствии с направлением момента. Величина силы
Pми2 = Mи2 /lAB , H. |
(3.9) |
25
Момент пары сил инерции кривошипа равен нулю, поскольку вращение кривошипа равномерное и угловое ускорение отсутствует.
Определение сил тяжести звеньев
Массы шатуна 2 и поршня 3 определяются по формулам:
G2 = m2 g, H; G3 = m3 g,H, |
(3.10) |
где g - ускорение свободного падения g = 9,8 м/с2.
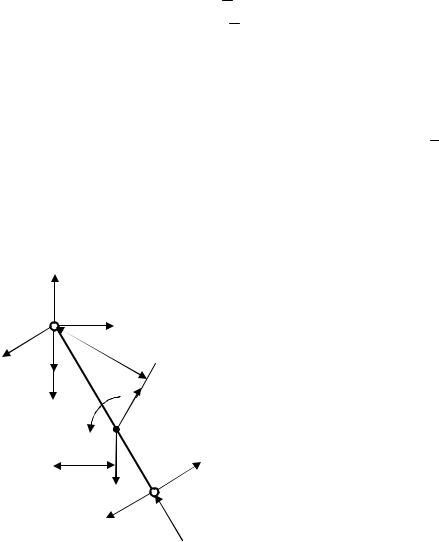
Силовой анализ группы Ассура 2-3
Произведем силовой анализ группы Ассура, состоящей из звеньев 2 и 3. Отделенная группа Ассура должна находиться в равновесии, поэтому в той точке, где присоединялся кривошип, прикладывается реакция со стороны
кривошипа на шатун |
|
|
|
τ |
|
|
n |
(рис. 3.5). Составляющая |
|
n |
направлена |
|
|
|
|
||||||||
R12 = R12 |
+ R12 |
R12 |
|||||||||
τ
параллельно оси шатуна, а R12 - перпендикулярно ему. Со стороны стойки на поршень действует реакция R03 , направленная перпендикулярно оси цилиндра.
Равновесие группы выражается векторной суммой
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
n |
|
|
|
|
|
|
|
|
= 0. |
(3.11) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
PДB + Pи2 + Pи3 + G2 + G3 + R12 |
+ R12 |
+ R03 + Pми2 |
+ Pми2 |
|||||||||||||||||||||
τ
Величина и направление касательной составляющей R12 определяются из условия равновесия группы Ассура в форме сумм моментов сил относительно точки В:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
(3.12) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑MB (P)= MB (Pи2 )+ MB (G2 )+ M B (R12 )+ MB (Pми2 )= 0, |
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑MB (P)= Pи2 h1 − G2 h2 − R12τ |
(lAB / l )+ Pми2 (lAB / l )= 0. |
|
|
|
|
(3.13) |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Из уравнения |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
Pи3 |
|
|
|
|
|
|
|
|
|
|
Rτ |
|
|
l |
(P |
|
|
|
|
|
|
|
|
|
(l |
|
/ |
|
|
)), H. |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
h − G |
|
h + P |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
ми2 В |
|
|
|
|
|
|
|
R |
03 |
|
|
|
|
|
|
|
|
12 |
|
|
lAB |
|
и2 |
1 |
|
|
2 |
2 |
ми2 |
|
AB |
|
|
l |
|
|
||||||||||||||
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
hP |
|
|
|
|
|
|
|
|
|
|
|
|
|
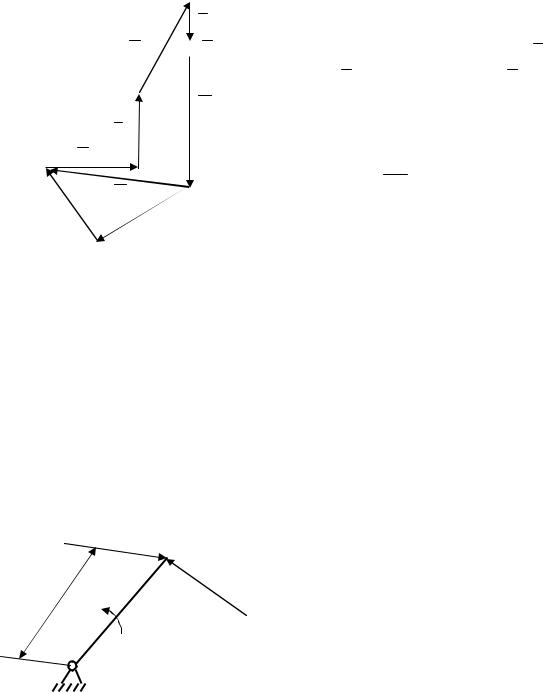
Величины и направления |
|
R12 и |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
определяются при помощи плана |
|||||||||||||||||||||||||
|
|
G3 |
|
|
|
|
|
|
|
|
|
|
R03 |
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сил, построенного в масштабе P , |
|
|
Н |
по |
||||||||||||||||||||||||||||||
|
|
P ДB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
Pи2 |
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
Мми2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мм |
||||||||
|
|
|
|
|
|
|
|
S2 |
|
|
|
|
|
|
|
|
векторному уравнению. При построении |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
hG |
|
|
|
|
|
|
|
|
|
плана сначала откладываются векторы |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
известных по модулю и направлению |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pми2 |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
G2 |
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сил, а затем известных лишь по линии |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
R12 |
|
|
|
|
n |
действия (рис. 3.6). Начало откладывае- |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R12 |
мого вектора должно совпадать с кон- |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
Рис. 3.5 План группы Ассура 2-3 |
цом ранее отложенного вектора. Прове- |
||||||||||||||||||||||||||||||||||||||||||||||||||
денные последними, линии действия |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и R03 |
|
пересекутся; при |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
векторов R12 |
|
|
|||||||||||||||||||||||||
G2
Pи2  G3
G3
P ДB
Pи3
R03
|
|
R12 |
||
|
n |
|
|
τ |
|
|
|
||
R12 |
|
|
||
|
|
|||
|
R12 |
|||
|
|
|
||
26
этом векторы взаимно ограничатся по длине.
τ
Соединив начало вектора R12 с
n
концом R12 , получим вектор R12 . Действительные величины реакций,
определенных с помощью силового многоугольника, с учетом масштабного коэф-
фициента P , Н .
мм
Рис. 3.6 План сил группы |
Силовой анализ ведущего звена |
|
(кривошипа) |
||
Ассура 2-3 |
||
|
Величина и направление уравновешивающего момента MУ определяются из условия равновесия ведущего зве-
на в форме суммы моментов относительно опоры (рис. 3.7):
|
|
|
|
|
|
|
|
|
|
|
|
|
∑MO (P)= MO ( |
|
21 )+ MУ |
= 0, |
(3.14) |
||||||
|
|
|
|
|
|
|
|
R |
|||||||||||||||
|
|
где |
|
21 - реакция со стороны шатуна 2 на кривошип 1. |
|
||||||||||||||||||
|
|
R |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R21 = −R12 ; |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
∑MO (P)= M У − R21 h21 |
= 0. |
(3.15) |
||||||||
|
|
|
|
|
|
Величина уравновешивающего момента |
|||||||||||||||||
|
|
|
R 12 |
A |
|||||||||||||||||||
|
|
|
|
|
|
|
найдется из уравнения |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
h21 |
Му |
Ру |
|
|
|
|
|
|
|
MУ = R21h1, Н м. |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
О |
|
|
|
|
|
|
|
|
|
|
Уравновешивающая сила |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
P = |
MУ |
, H. |
|
(3.16) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Рис. 3.7 План сил ведущего |
|
|
|
|
|
У |
lOA |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
звена |
|
Реакция со стороны стойки на кривошип |
|||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
01 определяется из уравнению 3.7 в мас- |
|||||||||||||
|
|
|
|
|
|
|
|
|
R |
||||||||||||||
|
|
|
|
|
|
|
|
штабе |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.17) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R21 + R01 = 0. |
|
|||||||
27
РАЗДЕЛ 4 КОЛЕБАНИЯ В МЕХАНИЗМАХ
Вибрация
Создание высокопроизводительных машин и скоростных транспортных средств, форсированных по мощностям, нагрузкам и другим рабочим характеристикам, приводит к увеличению интенсивности и расширению спектра вибрационных полей. Вредная вибрация нарушает планируемые конструктором законы движения машин, механизмов и систем управления, порождает неустойчивость рабочих процессов и может вызвать отказ и полную разрушение всей системы. Из-за вибрации увеличиваются динамические нагрузки в элементах конструкции (кинематических парах, стыках и др.), в результате снижается несущая способность деталей, развиваются трещины, возникают усталостные разрушения. Действие вибрации может изменить внутреннюю и поверхностную структуру материалов, условия трения и износа на контактных поверхностях деталей машин и привести к нагреву конструкций.
Вибрация порождает шум, являющийся важным экологическим показателем среды обитания человека. Вибрация оказывает и непосредственное влияние на человека, снижая его функциональные возможности и работоспособность. Однако вибрация не всегда является вредной. В настоящее время имеется много машин, в которых для выполнения того или иного технологического процесса намеренно возбуждаются колебания. Машины, в которых технологический процесс выполняется на основе возбужденных колебаний, называют вибрационными машинами. Такие машины получили большое распространение в различных отраслях промышленности и в сельском хозяйстве. С помощью вибрации дробят, измельчают, транспортируют кусковой и сыпучий материал, разделяют смеси, уплотняют бетон.
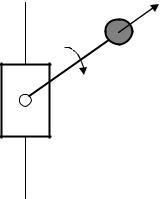
Наиболее распространенным возбудителем колебаний является дебалансный возбудитель(рис. 4.1). Неуравновешенная масса m вращается около оси О с угловой скоростью ω и развивает центробежную силу инерции Fи, равную
Fи=mω2ρ, |
(4.1) |
где ρ- расстояние центра масс m от оси О. Сила инерции дебаланса через опору О передается массе М, с которой связан рабочий орган вибромашины.
Fи
m
ω
О |
ρ |
|
М |
Рис. 4.1 Схема дебалансного вибратора
28
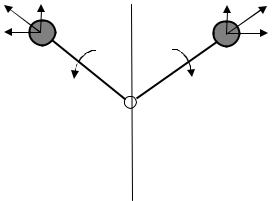
Существует дебалансный вибратор направленного действия (рис.4.2), в котором два дебаланса m вращаются с одинаковой скоростью в противоположных направлениях. Горизонтальные составляющие Fиx двух центробежных сил инерции Fи взаимно уравновешиваются, а вертикальные Fиу - складываются, образуя суммарную силу инерции
Fи=2Fиу=2 mω2ρcosα, |
(4.2) |
где α – угол, образуемый силой Fи с вертикальной осью.
Fи |
Fиу |
|
Fиу |
Fи |
|
|
m |
|
m |
|
|
Fиx |
ω |
|
ω |
Fиx |
|
|
ρ |
О |
|
ρ |
|
|
|
|
М |
|
|
Рис. 4.2 Схема дебалансового вибратора направленного действия
Общее для всех вибромашин следущее:
1)вибрационная машина является колебательной системой, состоящей из возбудителя колебаний – вибратора и колеблющейся массы, т.е. рабочего органа и частей, жестко с ним скрепленных;
2)рабочий процесс в вибромашинах получается в результате суммарного эффекта большого количества отдельных циклов, идущих один за другим.
При динамическом исследовании вибромашин необходимо составить и решить уравнения движения. В эти уравнения входят такие параметры:
1)возбуждающая сила вибратора;
2)восстанавливающие силы;
3)силы взаимодействия вибрирующего органа со средой;
4)инерционные силы.
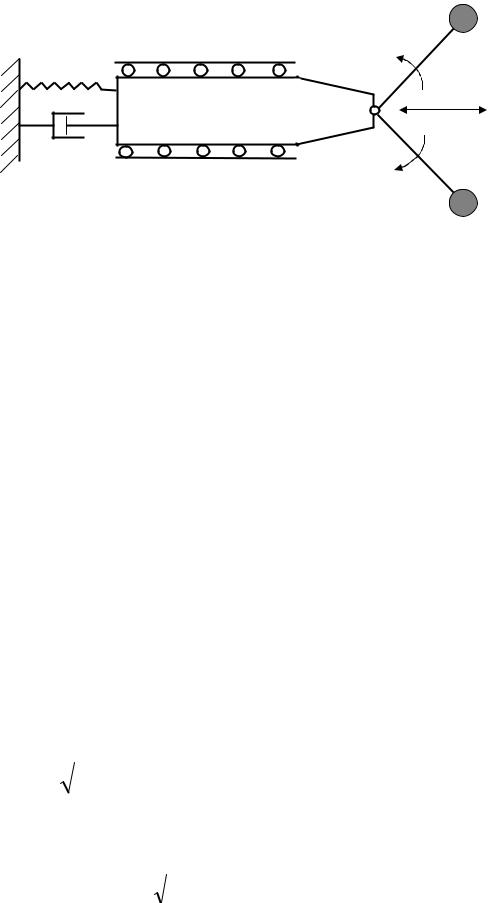
Рассмотрим динамическую модель вибрационной машины (рис.4.2). Дебалансный возбудитель направленного действия создает возбуждающую колебания силу Fи периодического действия, которая передается массе М, с массой М жестко связан рабочий орган – например дека для вибротранспортирования материалов.
Пружина с жесткостью с и демпфер с коэффициентом затухания b моделируют систему упругой подвески к неподвижному корпусу машины.
|
29 |
|
|
|
m |
|
ω |
|
с |
|
|
М |
|
Fи |
|
|
|
b |
|
|
|
ω |
m |
|
|
Рис. 4.3 Динамическая модель вибрационной машины с дисбалансным вибратором направленного действия
В линейной колебательной системе возбуждающая сила меняется по гармоническому закону
Fи=2mω2ρcоsωt, |
(4.3) |
где А=2mω2ρ амплитудное значение возбуждающей силы. |
|
Обозначим через х линейную координату перемещения массы М, тогда |
|
упругая сила пружины будет |
|
Fупр= -сx, |
(4.4) |
где с - жесткость пружины.
Демпфирующие свойства системы представим тоже в виде линейной функции скорости –bx. Проектируя все силы, приложенные к массе М на ось х, получим уравнение колебаний массы М
Мx"+bx'+cx= Аcоsωt. |
(4.5) |
Разделим обе части уравнения на М, получим
x"+2nx'+k2 x= αcоsωt, (4.6) где b/М=2n, c/ М= k2, А/ М=α.
Полное решение этого дифференциального уравнения представляет собой закон движения массы М, в которую входят свободные и вынужденные колебания. Свободные колебания в системе затухают быстро, тогда решение вынужденных колебаний массы М имеет вид
x = |
|
α |
|
|
cos( ωt − δ ) = H cos( ωt − δ ), (4.7) |
|||||||
|
|
|
|
|
|
|
||||||
(k 2 −ω 2 )2 + 4n2ω 2 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
||||
|
|
где |
δ = аrctg |
|
2nω |
|
; |
|
(4.8) |
|||
|
|
k |
2 |
2 |
||||||||
|
|
|
|
|
|
|
− ω |
|
|
|
|
|
|
|
Н = |
|
α |
|
|
|
; |
(4.9) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(k2 −ω2)2 +4n2ω2
Н- амплитуда колебаний массы.

30
Основные методы виброзащиты Уменьшение интенсивности колебаний объекта может быть достигнуто
несколькими способами.
1. Изменение конструкции объекта.
Устранение резонансных явлений, за счет изменения собственных частот объекта.
2. Виброизоляция.
Препятствует связи между источником колебаний и объектом, вибрацию которого необходимо снизить.
3.Динамическое гашение колебаний.
Осуществляется за счет ввода в конструкцию дополнительных устройств – виброгасителей.
4. Снижение виброактивности источника.
Причина возникновения колебаний может быть связана с трением в кинематических парах. Снижения виброактивнасти в этом случае можно добиться путем применения смазки. Если причиной возникновения колебаний являются движущиеся тела (ротор, перемещающиеся звенья механизма), то снизить интенсивность колебаний можно с помощью уравновешивания движущихся масс.
Уравновешивание вращающихся тел
Задача об уравновешивании вращающихся тел заключается в таком подборе их масс, который обеспечил бы полное или частичное погашение добавочных инерционных давлений на опоры. Вращающееся тело состоит из бесконечно большого числа элементарных масс mi, удаленных на расстояние ri j от оси вращения и на расстояние ai от плоскости, проходящей через центр S масс тела; тогда результирующая сила инерции Ри и результирующий момент Ми всех сил инерции тела относительно плоскости, проходящей через центр S масс:
|
|
|
и = ω2 ∑mi |
|
|
|
= ω2mrs ; |
(4.10) |
||||
Р |
||||||||||||
|
ri |
|||||||||||
|
|
и= ω2 ∑mi |
|
ai = ω2 |
|
ra , |
(4.11) |
|||||
М |
J |
|||||||||||
|
|
ri |
||||||||||
где m- масса всего тела, rs- расстояние центра S масс тела от оси вращения; Jra - центробежный момент инерции относительно оси вращения и плоско-
сти, перпендикулярной к оси вращения и проходящей через центр масс S тела.
При вращении тела угол между векторами Р и и М и сохраняет все время
одно и то же значение α. Тело считается полностью уравновешенным, если результирующая сила инерции равна нулю и, следовательно, вращающееся тело не оказывает никаких динамических давлений на опоры.
В этом случае имеем
|
|
|
|
|
= ω2 ∑mi |
|
|
= 0; |
(4.12) |
||
mrs |
ri |
||||||||||
|
|
|
= ω2 ∑mi |
|
ai = 0. |
(4.13) |
|||||
Jra |
|||||||||||
ri |
|||||||||||