

3764
.pdf
|
|
|
|
|
|
|
11 |
|
|
|
ωнi0 = 0,32 431 =138 |
рад с, |
|||||||
так как 262 138 , то двигатель удовлетворяет этому показателю. |
|||||||||
5. Проверка на перегрузку: |
|
|
|
|
|
|
|||
|
|
Mст |
|
|
|
2500 |
|||
Mтреб = |
Jн |
|
|
||||||
i |
+ |
|
|
|
+ |
Jдв i0 εн = 431 + |
|||
i |
|
|
|||||||
|
|
0 |
0 |
|
|
|
|||
|
5000 |
+662 10 |
−4 |
|
|
=19,40Н м. |
|||
+ |
431 |
|
|
431 0,34 |
|||||
|
|
|
|
|
|
|
|
|
|
Отношение M тр M ном =19,40 12,5 =1,55 2 , |
т.е. двигатель удовлетворяет условию |
||||||||
(10) и (11).
Делаем вывод, что двигатель выбран правильно, так как он удовлетворяет условию обеспечения требуемых скорости и нагрузки.
|
|
|
|
|
|
|
Таблица 2 |
|
Тип двигателя |
Мощность на валу Pном, кВт |
Частота вращения nном, об/мин |
Напряжение питания Uном, В |
Ток якоря I, А |
Сопротивление обмотки Rя, Ом |
Момент номинальный |
Момент инерции Jд, кг·м² |
|
|
|
|
|
|
|
|
|
|
|
0,76 |
2500 |
110 |
8,2 |
0,237 |
2,96 |
|
|
МИ- |
0,45 |
1500 |
5,0 |
0,605 |
2,92 |
0,013 |
|
|
0,37 |
1000 |
|
4,2 |
1,46 |
3,6 |
|
||
32 |
0,76 |
2500 |
220 |
4,1 |
0,85 |
2,96 |
5 |
|
|
0,45 |
1500 |
2,5 |
2,38 |
2,92 |
|
|
|
|
0,37 |
1000 |
|
2,1 |
5,27 |
3,6 |
|
|
|
1,6 |
2500 |
110 |
19,2 |
0,147 |
6,25 |
|
|
МИ- |
1,1 |
1500 |
13,0 |
0,42 |
7,15 |
0,040 |
|
|
0,76 |
1000 |
|
9,0 |
1,5 |
7,4 |
|
||
41 |
1,6 |
2500 |
220 |
9,5 |
0,58 |
6,25 |
8 |
|
|
1,1 |
1500 |
6,4 |
1,7 |
7,15 |
|
|
|
|
0,76 |
1000 |
|
4,5 |
3,32 |
7,4 |
|
|
|
3,2 |
2500 |
110 |
36,3 |
0,06 |
12,5 |
|
|
МИ- |
1,6 |
1500 |
18,2 |
0,192 |
10,4 |
0,066 |
|
|
1,1 |
1000 |
|
12,6 |
0,435 |
10,7 |
|
||
42 |
3,2 |
2500 |
220 |
18,2 |
0,239 |
12,5 |
2 |
|
|
1,6 |
1500 |
9,1 |
0,75 |
10,4 |
|
|
|
|
1,1 |
1000 |
|
6,3 |
0,71 |
10,7 |
|
|
МИ- |
5,0 |
2500 |
220 |
27,2 |
– |
19,4 |
0,127 |
|
3,2 |
1500 |
17,1 |
– |
20,8 |
|
|||
51 |
|
|||||||
1,6 |
1000 |
|
8,7 |
– |
15,6 |
|
|
|
|
|
|
|
|||||
МИ- |
7,0 |
2500 |
220 |
37,0 |
0,065 |
27,2 |
0,153 |
|
4,5 |
1500 |
24,0 |
0,162 |
29,2 |
|
|||
52 |
|
|||||||
2,5 |
1000 |
|
13,1 |
0,392 |
24,2 |
|
|
|
|
|
|
|
|||||

12
Лабораторная работа №3
Определение передаточных функций электродвигателей
|
|
|
|
|
|
|
|
|
|
|
|
|
Теоретическая часть |
|||||
|
|
|
|
|
Схема включения двигателя постоянного тока независимого возбуждения |
|||||||||||||
+ |
|
|
|
|
U |
|
|
|
– |
Переходные процессы в двигателе описывают систе- |
||||||||
|
|
|
|
|
|
|
мой уравнений: |
|
||||||||||
|
|
|
|
|
|
E |
|
|
|
|
|
U = Rя I + L |
dI |
+ E, где E = ce Φ ω = ke ω |
||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
(12) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dω |
, где Mдв |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Mдв = Mст + J |
= cм Φ ω = kм I |
||||
|
|
|
|
|
|
М |
|
|
|
|
|
|
dt |
|||||
|
R |
|
|
|
|
|
|
|||||||||||
|
я |
|
|
|
Мдв |
где U – напряжение питания двигателя; Rя – сопротивление |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ОВ |
цепи якоря; I – ток якоря; L – индуктивность рабочей об- |
||||||
Iв |
|
|
|
Rв |
|
|
|
мотки; E – противо ЭДС; Mдв |
– вращающий момент двига- |
|||||||||
|
|
|
|
|||||||||||||||
|
|
|
|
|
Uв |
|
|
|
|
|
теля; Mст – постоянный (статический) момент нагрузки; J – |
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
+ |
|
– |
момент инерции двигателя; Ф – магнитный поток возбуж- |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
дения; ce , ke , cм , kм – коэффициенты ЭДС и момента; ω – |
|||||
угловая скорость вращения двигателя. |
|
|||||||||||||||||
|
|
|
|
|
При отсутствии значения R в расчетах можно принять |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R ≈ 0,5(1−η)Uном Iном |
(13) |
||||
(определяем по номинальным значениям соответственно КПД, напряжение и ток двигателя, в случае если величина R не задана);
|
|
|
|
|
|
|
|
|
L ≈ c |
|
|
|
Uном |
|
|
|
|
, |
|
|
(14) |
|
|
|
|
|
|
|
|
|
|
2 p |
n |
I |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
дв |
ном |
|
ном |
|
|||||
где c = 6 ÷8 |
(коэффициент, |
принимающий меньшее значение для двигателей |
||||||||||||||||||||
малой мощности и большее – для двигателей большей мощности); |
pдв – число |
|||||||||||||||||||||
пар полюсов двигателя. |
|
|
|
|
|
В дальнейшем будем рассматривать систе- |
||||||||||||||||
|
|
W1(P) |
|
|
|
|
|
|
||||||||||||||
U(P) |
|
|
|
|
|
му уравнений (12) с переменными в виде малых |
||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
Двигатель |
|
ω(P) |
|
|
отклонений от установившегося режима: u, i. |
|||||||||||||||
|
|
|
|
|
||||||||||||||||||
Mст(P) |
|
постоянного |
|
|
|
|
|
|
|
Передаточная функция – это |
отношение |
|||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
тока |
|
|
|
|
|
преобразования |
Лапласа выходного |
сигнала к |
||||||||||||
Mн(P) |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
входному. |
|
|
|
|
|
|
|
|
||||||
|
W2(P) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
Перепишем эти уравнения в операторном |
|||||||||||
виде, используя символ дифференцирования p: |
|
|
|
|
|
|
||||||||||||||||
|
u = keω +(Rя + L p) i; |
|
|
|
|
u |
=ω +(Rя + L p) |
Mн + J p ω |
; |
|
||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||
|
или |
|
ke |
|
|
|
|
|
|
kм ke |
(15) |
|||||||||||
|
kмi = Mн + J p ω, |
|
|
|
|
|
Mн + J |
p ω |
|
|
|
|
||||||||||
|
|
|
|
|
i = |
, |
||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kм |
|
|
|
|
|
|
|
|

13
откуда
|
u |
|
|
|
L J |
|
2 |
|
|
Rя J |
|
|
|
|
|
|
|
|
|
Rя |
|
L |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
= |
|
|
|
|
|
|
p ω + |
|
|
|
pω +ω + |
|
|
|
|
1+ |
|
|
|
p Mн. |
|
||||||||||
|
ke |
ke |
kм |
|
ke kм |
|
ke |
|
|
|
Rя |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kм |
|
|
|
|||||||||||||||||
Находим отсюда скорость: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
2 |
|
Rя J |
|
|
|
|
|
u |
|
|
|
Rя |
|
L |
|
|
|
||||||||||
|
L J |
|
p |
+ |
|
|
|
|
|
− |
|
|
|
Mн, |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
ke |
kм |
|
p +1 ω = |
|
ke |
|
ke |
|
|
1+ |
Rя |
p |
|
|||||||||||||||
ke kм |
|
|
|
|
|
|
|
|
|
|
|
kм |
|
|
|
|||||||||||||||||||
или |
(Tэ Tм p2 +Tм p +1) ω = k1 u −k2 (1+Tэ p) Mн, |
|
||||||||||||||||||||||||||||||||
откуда |
(16) |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
k1 |
|
|
|
|
|
|
|
|
|
|
|
k2 (1+Tэ p) |
|
|
|
|
||||||||||
ω(p)= |
|
|
|
|
|
|
|
|
|
|
u(p) |
− |
|
|
|
|
|
Mн(p), |
(17) |
|||||||||||||||
T T p2 +T p + |
1 |
T |
T |
p2 |
+T |
p +1 |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
э |
|
м |
|
|
|
м |
|
|
|
|
|
|
э |
|
|
м |
|
|
м |
|
|
|
|
|
|
||
где Tэ = L Rя и Tм = JRя
Rя и Tм = JRя  ke kм – соответственно электромагнитная и электромеханическая постоянные времени двигателя, с; k1 =1
ke kм – соответственно электромагнитная и электромеханическая постоянные времени двигателя, с; k1 =1 ke – коэффициент усиления двигателя, 1/В·с; k2 = Rя
ke – коэффициент усиления двигателя, 1/В·с; k2 = Rя  kekм – коэффициент пропорциональности, 1/с·Н·м.
kekм – коэффициент пропорциональности, 1/с·Н·м.
Значение коэффициентов ke , kм могут быть определены по номинальным параметрам двигателя:
|
|
Uном − RяI |
|
|
Mном |
|
|
|
Pном |
|
|
|
(18) |
||||
|
ke = |
|
|
|
|
и |
kм = |
|
= |
|
. |
|
|
|
|
||
|
|
ωном |
I |
ωном I |
|
|
|
|
|||||||||
Передаточные функции двигателя (вход – напряжение питание или мо- |
|||||||||||||||||
мент нагрузки, выход – скорость вращения) отсюда в операторном виде: |
|||||||||||||||||
W1(p)= |
|
k1 |
и |
W2 (p)= − |
|
|
k2 (1+Tэ p) |
|
|||||||||
|
|
|
|
|
|
|
. |
(19) |
|||||||||
T T p2 |
+T p +1 |
T |
T p2 +T |
м |
p +1 |
||||||||||||
|
э м |
|
м |
|
|
|
|
э |
м |
|
|
|
|||||
Переходной процесс для вещественных отрицательных корней будет апериодическим, для комплексных сопряженных – колебательным. В любом случае вещественная часть корней должна получиться отрицательной (затухающий характер переходного процесса).
Пример расчета
Определить передаточные функции ИД (ИД и его технические данные взять из лабораторной работы №1).
1. Коэффициент ЭДС определяем по номинальным значениям парамет-
ров:
ke = |
U ном − Rя I |
= |
110 −36,3 0,06 |
= 0,41 B с рад. |
|
262 |
|||
|
ωном |
|
||
2. Коэффициент момента согласно уравнению (19): kм = MIном = 1236,,53 = 0,344 Н м А.
А.
3. Полный момент инерции двигателя:
J = Jдв + |
J н |
= 0,0662 + |
5000 |
= 0,0931 кг м2 . |
2 |
2 |
|||
|
i0 |
|
431 |
|

14
4. Электромеханическая постоянная времени двигателя:
Tм = |
JRя |
= |
0,0931 0,06 |
= 0,039 c . |
|
ke kм |
0,41 0,344 |
||||
|
|
|
5. Электромагнитная постоянная времени:
Tэ = |
L |
= |
c U ном |
= |
8 110 |
= 0,081 |
c . |
Rя |
Rя 2 pдвnномIном |
0,06 2 1 2500 36,3 |
6. Коэффициент передачи двигателя по скорости
k1 = |
1 |
= |
1 |
= 2,44 |
рад |
. |
|
0,41 |
|
||||
|
ke |
|
с B |
|||
7. Коэффициент передачи двигателя по моменту нагрузки:
k2 = |
Rя |
|
= |
0,06 |
= 0,42 |
рад |
. |
ke k |
|
0,41 0,344 |
с Н м |
||||
|
м |
|
|
||||
8. Отсюда передаточные функции двигателя:
|
W1 |
(p)= |
|
2,44 |
|
|
|
|
рад |
; |
|
|
|
0,081 0,039 p2 +0,039 p +1 |
|
|
|||||||||
|
|
|
|
|
с B |
|
||||||
W2 |
(p)= − |
|
|
0,42(1+0,081 p) |
|
. |
|
|
рад |
. |
||
0,081 |
0,039 p2 +0,039 |
p +1 |
|
с Н м |
||||||||
|
|
|
|
|
|
|||||||
Корни характеристического уравнения вещественные отрицательные, что говорит о затухающем апериодическом характере переходного процесса. Для комплексных корней с отрицательной вещественной частью переходный процесс затухающий колебательный.
Лабораторная работа №4
Выбор усилителя и расчет измерителя рассогласования
|
|
Wус |
|
Wид |
Зад |
∆Rу |
Операцион- |
Uн, Iн |
Исполни- |
ный усили- |
тельный |
|||
|
Iу |
тель |
|
двигатель |
|
|
|
|
ИД |
|
|
|
ОС |
|
Рис. 9 Структурная схема АСР
Исходными данными для выбора усилителя являются: мощность, напряжение питания и ток исполнительного электродвигателя, определенные в предыдущей части.
Операционные усилители выполняют не только функции суммирования и усиления сигнала, но и выполнение некоторых других математических операций над сигналами, поэтому суммирующие усилители в этих системах называ-

15
ют регуляторами. Используют четыре типа регуляторов: П – регулятор, ПИ – регулятор, ПД – регулятор и ПИД – регулятор.
Операционный усилитель – это усилитель с нечетным числом каскадов усиления и с большим коэффициентом усиления (Ку > 1000), охваченный сильной отрицательной обратной связью и практически не имеющий дрейфа нуля.
Математические операции, выполняемые операционным усилителем, определяются видом сопротивлений обратной связи и входной цепи.
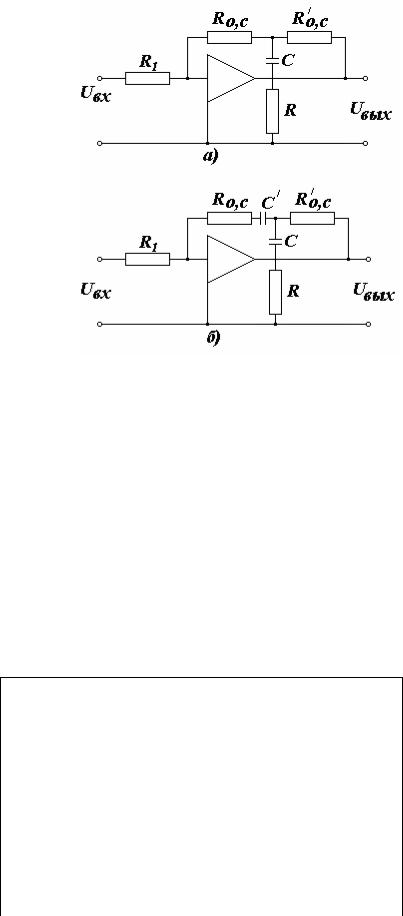
На рис. 10 приведены схемы П и ПИ – регуляторов.
Рис. 10 Схемы П и ПИ – регуляторов
Сигнал на выходе П – регулятора пропорционален входному, т.е.
Uвых = kUвх ,
где k = Ro,c  R1 .
R1 .
Сигнал на выходе ПИ – регулятора пропорционален входному и интегралу от входного сигнала по времени, т.е.
|
|
Uвых |
= |
k |
∫Uвхdt + kUвх , |
|
|
|
|
|||||
|
|
T |
|
|
|
|
||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
||
|
или в операторной форме |
|
|
|
|
|||||||||
W (p)= |
Uвых(р) |
= k |
1+T0 p |
= |
1+T0 p |
|
= k |
1 |
|
; |
||||
|
|
T p |
T |
p |
||||||||||
|
U |
вх |
(р) |
|
|
|
T p |
|
|
|
||||
|
|
|
0 |
01 |
|
|
01 |
|
|
|||||
k = 1 ,
T01
где T0 = Ro,cC; k = Ro,c  R1; T01 = R1C; P - оператор.
R1; T01 = R1C; P - оператор.
На рис. 11 приведены схемы ПД и ПИД – регуляторов.
16
Рис. 11 Схемы ПД и ПИД – регуляторов Для управления мощным исполнительным устройством, которым являет-
ся ИД, необходимо применять усилитель сигнала датчика (непрямое регулирование). Датчик, измеряющий рассогласование между задаваемым и фактическим положением (скоростью, ускорением или другими параметрами рабочего органа), может быть выполнен на потенциометрических измерительных преобразователях (ИП), сельсинах или других датчиках, включаемых обычно дифференциальной схеме. Если управляемая величина – ток, напряжение, момент и т.д., а задатчиком является задающая рукоятка или ось, то сигнал рассогласования может быть получен с помощью различных датчиков.
Исходными данными по выбору потенциометрического датчика являются: сопротивление датчика и напряжение питания датчика, выбираемые по номеру варианта из табл. 3.
Таблица 3
Технические данные потенциометрических датчиков ПД или ПП
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
Напря- |
|
|
|
|
|
|
|
|
|
|
жение |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
питания, |
||||||||||
В |
|
|
|
|
|
|
|
|
|
|
Сопро- |
110 |
120 |
130 |
140 |
150 |
160 |
170 |
180 |
190 |
200 |
тив- |
||||||||||
ление, |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Ом |
|
|
|
|
|
|
|
|
|
|
17
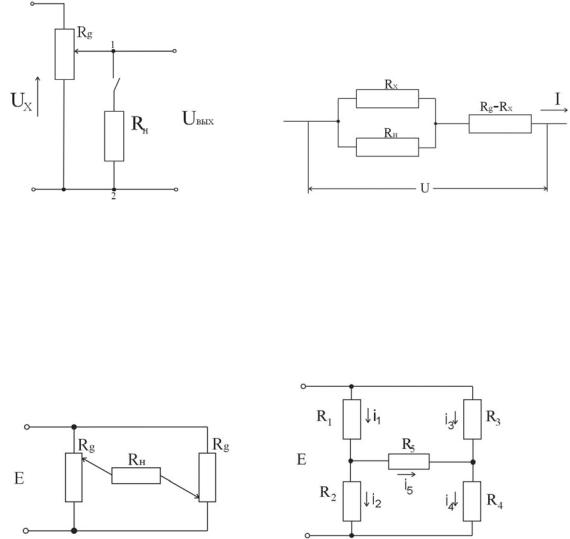
Потенциометрический датчик (рис. 12,а) углового (линейного) смещения
без нагрузки обеспечивает выходное напряжение U вых =U |
Rx |
, где U – напряже- |
|
||
|
RД |
|
ние питания; Rx – сопротивление части датчика, соответствующее относительному смещению движка x (от 0 до 1); RД – полное сопротивление датчика. Иначе: Uвых =U x. При наличии нагрузки выходное напряжение датчика, см. рис.12, б
U вых = I |
Rx Rн |
, или U вых = |
U |
|
|
|
Rx Rн |
, |
|
|
Rx Rн |
|
|
||||
|
Rx + Rн |
RД − Rx + |
|
|
Rx + Rн |
|||
|
|
|
Rx + Rн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|||
откуда |
|
|
|
|
Рис.12 |
|
|
|
|
|
|
|
|||||
|
U |
|
|
|
|
|
|
|
U |
|
|
|
|
||||
Uвых = |
|
|
|
|
|
|
|
, или U вых = |
|
|
|
|
, |
(20) |
|||
RД Rx |
− |
R2 |
|
+ |
RД Rн |
|
1 |
+ |
1 |
− |
x |
||||||
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
α |
|
x |
α |
|
||||||
|
|
R R |
R R |
R R |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
x н |
|
x |
н |
|
x н |
|
|
|
|
|
|
|
|
|
|
где x = Rx  RД ; α = Rн
RД ; α = Rн  RД – относительное сопротивление нагрузки.
RД – относительное сопротивление нагрузки.
а) |
б) |
|
Рис. 13 |
При включении датчика по схеме рис. 13,а можно изучать его работу согласно эквивалентной схеме (рис. 13,б). Обозначим падения напряжений на любом резисторе схемы R соответственно U k (k = 0,1...5) . Поскольку все элемен-

18
ты – резисторы, тип компонентного уравнения U k = ik Rk (закон Ома). Всего та-
ких уравнений 5. Топологические уравнения (описывающие «форму», т.е. характер соединений в схеме) представим в виде уравнений равновесия – для узлов а и б:
i1 −i2 −i5 = 0 и i3 +i5 −i4 = 0 , |
(21) |
а также в виде уравнений совместимости – для контуров, включающих источник питания (см. схему на рис. 2,б):
U 1 + U 2 |
= U ; U3 +U 4 =U и U 1 |
|
+ U 5 |
− U 3 |
= 0 . |
(22) |
||||||||||||||||
Так как необходимо найти i5 (ток в нагрузке), получена система 5 уравне- |
||||||||||||||||||||||
ний с 5 неизвестными (i1… i5): |
i1 −i2 −i5 |
= 0 |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
i3 +i5 −i4 |
= 0 |
|
|
|
|
|
|
|
|
|
(23) |
|||||
|
|
|
|
|
|
R1i1 + R2i2 =U |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
R3i3 + R4i4 =U |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
R1i1 − R3i3 + R5i5 = 0 |
|
|
|
|
|
|
|
|
|
|||||||
Составляя и решая матрицу коэффициентов при неизвестных, получим i5. |
||||||||||||||||||||||
i5 = |
|
|
|
|
|
|
U (R2 R3 − R1 R4 ) |
|
|
|
|
|
|
|
. |
(24) |
||||||
R |
(R |
+ R |
2 |
)(R |
+R |
4 |
)+ R R |
(R |
+R |
4 |
)+ R R |
4 |
(R + R |
2 |
) |
|||||||
|
|
|
||||||||||||||||||||
|
5 |
1 |
|
3 |
|
|
1 |
2 |
|
3 |
3 |
1 |
|
|
|
|
||||||
В задаче необходимо выполнить расчет зависимости выходного тока ИР
при неизменном среднем положении движка второго датчика (например, при заторможенном регулирующем органе, т.е. при R3 = R4 = 12 RД ).*
Значения R1 и R2 следует принять равнымиR2 = xRД ;* R1 = (1− x)RД *.С учетом значений R1 ÷ R4 выражение (24) следует упростить. После упрощения выражение (24) следует рассчитать значения тока i5 при x=0; 0,1; 0,2; …; 1,0, при этом, очевидно, R5 = RУУ * (входное сопротивление выбранного усилителя). Выходное напряжение Uвыхн = i5 Ry , напряжение на выходе датчика на холостом ходу может быть получено путем упрощения выражения:
х.х |
R2 R3 |
−R1R4 |
R2 R3 −R1R4 |
|
(25) |
|
Uвых =U |
|
=U |
|
. |
|
|
(R +R )(R +R ) |
R2 |
|
||||
|
1 2 |
3 4 |
|
Д |
|
|
Последнее выражение известно из теории мостовых схем.
Абсолютная методическая погрешность датчика определяется разностью выходного напряжения на холостом ходу и под нагрузкой:
U =Uвыхх.х −Uвыхн . |
(26) |
Порядок выполнения задания
19
1.Упростить уравнение (24) с учетом условий * , где х – относительное смещение движка датчика от нижней до верхней части датчика.
2.Рассчитать значение тока нагрузки (тока ИР) по выражению, получен-
ному в п. 1, при х=0; 0,1; 0,2; …;1,0.
3.Рассчитать значение выходного напряжения Uвыхн = i5 Ry и на холостом
ходуUвыхх.х .
4. Рассчитать значение абсолютной погрешности U преобразования датчика в зависимости от х.
Данные привести в виде таблицы
|
|
|
|
|
|
Таблица 4 |
|||
|
Показатели |
Относительное смеще- |
|
||||||
|
|
ние движка, х |
|
||||||
|
|
0 |
0,1 |
0,2 |
0,3… |
0,8 |
0,9 |
1,0 |
|
1) |
Ток в нагрузке датчика, |
|
|
|
|
|
|
|
|
i5 |
|
|
|
|
|
|
|
|
|
2) |
Выходное напряжение |
|
|
|
|
|
|
|
|
нагруженного датчика, |
|
|
|
|
|
|
|
|
|
Uвыхн |
|
|
|
|
|
|
|
|
|
3) |
Выходное напряжение |
|
|
|
|
|
|
|
|
датчика на холостом ходу, |
|
|
|
|
|
|
|
|
|
Uвыхх.х |
|
|
|
|
|
|
|
|
|
4) |
Абсолютная погреш- |
|
|
|
|
|
|
|
|
ность выходного напря- |
|
|
|
|
|
|
|
|
|
жения датчика, U |
|
|
|
|
|
|
|
|
|
5. Построить графики зависимостей показателей работы датчика п.п. 1-4 таблицы в зависимости относительного смещения движка i5 , Uвыхн , Uвыхх.х , U от х.
Лабораторная работа №5
Расчет потенциометрического преобразователя со средней точкой
Дана потенциометрическая схема включения реостатного датчика с подключением сопротивления нагрузки между средней точкой сопротивления и движком потенциометра (рис. 14). Исходные данные для расчетов приведены в табл. 5.
Необходимо:
1. Определить при изменении относительного перемещения движка от

20
Рис. 14 Схема потенциометрического датчика с отводом
-0,5 до +0,5 с интервалом через 0,1: ток нагрузки Iн , выходное напряжение потенциометра Uвых при Rн = ∞; выходное напряжение Uвых на нагрузке; мощность выходного сигнала Р, абсолютные U и относительные δU погрешности нагруженного потенциометра.
2. Определить абсолютную и относительную погрешность при увеличении сопротивления нагрузки в десять раз (10 Rн ) и относительном перемеще-
нии движка 0,5. Сравнить результаты расчетов с погрешностями при заданном значении сопротивления нагрузки в той же точке и сделать выводы.
3. Построить в прямоугольной системе координат перечисленные ниже характеристики потенциометра при изменении относительного перемещения движка от -0,5 до +0,5: статическую характеристику при холостом ходе ( Rн = ∞)
Uвых0 = fX , то же, при нагрузке Uвых = f (X ) ; крутизну характеристики K = f (X ) ; относительную погрешность δU = f (X ) . Результаты расчетов свести в табл. 6.
Таблица 5
Показа- |
|
|
|
Номер варианта |
|
|
|
|||
тели |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
Напряжение |
110 |
110 |
110 |
110 |
110 |
220 |
220 |
220 |
220 |
220 |
питания U п , В |
||||||||||
Сопротивление |
300 |
100 |
200 |
400 |
400 |
200 |
200 |
150 |
400 |
600 |
потенциометра |
||||||||||
R, Ом |
|
|
|
|
|
|
|
|
|
|
Сопротивление |
400 |
200 |
400 |
500 |
600 |
300 |
450 |
200 |
600 |
800 |
нагрузки Rн , Ом |
||||||||||