

3593
.pdfМинистерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования
«Воронежский государственный лесотехнический университет им. Г.Ф. Морозова»
Факультет механический Кафедра автоматизации производственных процессов
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания к выполнению курсовой работы для студентов
по направлению подготовки
15.03.06 Мехатроника и робототехника
Воронеж, 2019
УДК 658.5.011.56
Поляков С. И. Теория автоматического управления [Электронный ресурс]: методические указания к выполнению курсовой работы для студентов по направлению подготовки 15.03.06 Мехатроника и робототехника / С. И. Поляков; ВГЛТУ. - Воронеж, 2019. - 27 с. - ЭБС ВГЛТУ.
Печатается по решению редакционно-издательского совета ФГБОУ ВО «ВГЛТУ»
Рецензент: профессор кафедры систем управления и информационных технологий в строительстве Воронежского государственного технического университета В.И. Акимов
2
ВВЕДЕНИЕ
Настоящие методические указания предназначены для выполнения курсовой работы по дисциплине «Теория автоматического управления» (ТАУ). Курсовая работа предусмотрена учебным планом по направлению подготовки 15.03.06 Мехатроника и робототехника (уровень бакалавриата) Профиль - Управление в мехатронных и робототехнических системах, ее цель закрепить основные теоретические положения дисциплины ТАУ и привить студентам навыки самостоятельного практического исследования и расчета систем автоматического управления.
В качестве задания студентам предлагается составить математическую модель системы автоматического управления реальным промышленным объектом, провести анализ этой системы и синтез законов управления. Причем, задание предполагает проведение исследований, как в непрерывной постановке, так и в случае, когда в качестве управляющего устройства (регулятора) используется БЦВМ. Таким образом, выполнение курсовой работы, с одной стороны, опирается на большинство теоретических разделов дисциплины, а с другой, предоставляет возможность уяснить практическую схему современного проектирования реальных систем автоматического управления.
Выполнение курсовой работы предусмотрено при изучении второй части дисциплины. Однако выдача задания на проектирование производится, как правило, при изучении первой части. В этом случае исходные данные к курсовому проекту служат основой для индивидуальных домашних заданий и расчетно-графических работ, выполняемых при изучении первой части дисциплины.
При получении задания на курсовую работу каждому студенту сообщается двухзначный шифр, первая цифра которого означает вариант системы управления, а вторая номер варианта исходных данных для проектирования указанной системы. Все предлагаемые варианты курсовой работы примерно равнозначны по сложности и по объему вычислений. При этом на ее выполнение отводится 54 академических часов самостоятельной работы.
ОПИСАНИЕ, ИСХОДНЫЕ ДАННЫЕ И ТЕХНИЧЕСКОЕ ЗАДАНИЕ НА ПРОЕКТИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ
1. Система стабилизации скорости вращения двигателя
Система предназначена для стабилизации скорости вращения двигателя постоянного тока, работающего при изменяющемся моменте сопротивления нагрузки.
Функционально-принципиальная схема системы представлена на рис. 1. Система состоит из двигателя (Д), работающего на изменяющуюся
3

нагрузку (Н), усилителя мощности, в качестве которого используется генератор (Гm), дополнительного генератора (Г0) и регулятора (Р).
На вход регулятора поступает сигнал U ω пропорциональный разности заданной скорости стабилизации ω0 и действительной скорости
вращения нагрузки , которая измеряется с помощью тахогенератора (ТГ). Кроме того, на регулятор могут подаваться: сигнал Ud c делителя R1, R2,
пропорциональный напряжению генератора Гm и сигнал U i , пропорциональный разности заданного тока якоря im0 и действительного тока im , измеряемого с помощью резистора RT .
Система работает следующим образом. При номинальной нагрузке М с0 вал двигателя вращается с заданной скоростью ω0 под действием
напряжения с генератора Г0. При этом напряжение с тахогенератора Uω |
|||||||
равно по величине и противоположно по знаку напряжению задатчика U 0 , и |
|||||||
|
|
|
|
|
|
|
ω |
с выхода сумматора Σ1 |
сигнал равен нулю. Кроме того, в этом режиме через |
||||||
двигатель протекает номинальный ток i 0 |
, и напряжение U |
T |
на резисторе R |
||||
|
|
m |
|
|
|
T |
|
равно по величине и противоположно по знаку напряжению UT0 , так что на |
|||||||
выходе сумматора Σ2 |
сигнал также отсутствует. Таким образом, при |
||||||
номинальной нагрузке, |
если ω ω0 , на |
обмотку |
возбуждения генератора |
||||
(ОВГ) сигнал не подается, и напряжение на выходе генератора |
Г m равно |
||||||
нулю. |
|
|
|
|
|
|
|
При |
изменении |
нагрузки на величину |
Mc изменяется |
скорость |
|||
двигателя |
и ток якоря, что приводит |
к появлению сигналов |
на входе |
||||
4
регулятора и, следовательно, к появлению напряжения на генераторе Г m . В результате под действием суммарного напряжения на генераторов Г0 , Гm
скорость двигателя становится близкой к номинальной.
Исходные данные для проектирования приведены в таблице 1.
Примечания:
1.В качестве объекта управления принять двигатель с усилителем мощности (генераторы Г0 , Гm ).
2.При составлении математической модели объекта сопротивлениями
ииндуктивностями якорных обмоток генераторов Г0 , Гm пренебречь.
3.При анализе и синтезе системы использовать описание объекта управления в отклонениях от режима стабилизации. При этом считать, что изменение момента сопротивления нагрузки от номинального значения носит ступенчатый характер.
2. Система стабилизации напряжения генератора
Система предназначена для стабилизации напряжения генератора постоянного тока, работающего при изменяющейся активной нагрузке.
Функцианально-принципиальная схема системы представлена на рис. 2. Система состоит из генератора постоянного тока Г, якорная цепь которого замкнута на активную изменяющуюся нагрузку RН, приводного двигателя Д, работающего от суммирующего усилителя мощности СУМ, и регулятора Р.
На вход регулятора поступает сигнал, пропорциональный разности
5
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Показатели качества |
|
|
Параметры объекта |
|
|
|
|
Параметры |
|
|
Изм |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
измерителей |
|
|
енен |
|
|
№ |
Оши |
Вре |
Пок |
Ради |
Инд |
Соп |
Коэ |
Инд |
Соп |
Мом |
Постоянн |
Коэ |
|
|
|
|
ие |
|
|||||
ые |
|
|
|
|
мом |
|
|||||||||||||||||
бка |
мя |
азат |
ус |
укти |
роти |
ф. |
укти |
роти |
ент |
ф. |
|
|
|
|
|
||||||||
|
|
|
|
|
|
||||||||||||||||||
|
двигателя |
|
|
|
|
ента |
|
||||||||||||||||
ва |
регу |
регу |
ель |
усто |
вн. |
вл. |
меж |
вн. |
влен |
инер |
пере |
|
|
|
|
|
|||||||
|
|
|
|
|
|
сопр |
|
||||||||||||||||
лиро |
лиро |
коле |
йчив |
О.В. |
О.В. |
ду |
якор |
якор |
ц. на |
|
|
дач |
|
|
|
|
|
||||||
р |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
отив |
|
||||||||||||||||
вани |
вани |
бате |
ости |
гене |
гене |
э.д.с |
я |
я |
валу |
|
|
и |
|
|
|
|
|
||||||
иа |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
лен. |
|
||||||||||||||||
|
я |
я. |
льно |
|
рато |
рато |
. |
двиг |
двиг |
дви |
|
|
тахо |
|
|
|
|
|
|||||
нт |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
нагр |
|
||||||||||||||
|
|
|
|
сти |
|
ра |
ра |
гене |
ател |
ател |
гате |
|
|
гене |
|
|
|
|
|
||||
а |
|
|
|
|
|
|
|
R1 |
R2 |
RТ |
|
|
|||||||||||
ω* |
|
|
се |
см |
|
. |
|
||||||||||||||||
|
|
|
R* |
|
|
р. и |
я |
я |
ля |
|
рат. |
|
|
|
|
|
|||||||
|
|
|
|
|
|
кОм |
кОм |
Ом |
|
|
|||||||||||||
|
|
рад |
t p* |
М * |
|
Lв |
Rв |
ток. |
|
|
|
Jд |
|
в сек |
нм/а |
kтг |
|
|
|
|
Мс |
|
|
|
|
сек |
|
сек |
|
|
г н |
Ом |
О.В. |
Lя |
R |
я |
н м |
|
|
в сек |
|
|
|
|
н м |
|
|
|
|
|
|
|
|
Г. |
|
|
сек |
2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
г н |
Ом |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
mг |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в / а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0.7 |
|
2.0 |
1.2 |
- |
7.5 |
75.0 |
78.0 |
0.6 |
2.0 |
0.02 |
0.35 |
0.21 |
0.3 |
5.1 |
2.5 |
- |
|
1.2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
0.5 |
|
2.0 |
- |
0.8 |
10.5 |
87.5 |
90.0 |
2.0 |
2.5 |
0.02 |
0.31 |
0.2 |
0.2 |
6.2 |
3.8 |
- |
|
0.6 |
|
|||
3 |
0.6 |
|
1.5 |
1.3 |
- |
9.5 |
106. |
100. |
0.36 |
1.6 |
0.02 |
0.7 |
0.19 |
0.4 |
2.5 |
1.0 |
- |
|
1.2 |
|
|||
|
|
|
|
|
|
|
|
7 |
0 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
4 |
0.4 |
|
1.5 |
- |
0.75 |
6.8 |
97.0 |
100. |
0.9 |
1.9 |
0.03 |
0.42 |
0.25 |
0.2 |
8.4 |
4.2 |
- |
|
1.1 |
|
|||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
5 |
0.5 |
|
2.0 |
1.4 |
- |
16.8 |
140. |
120. |
1.4 |
2.4 |
0.01 |
0.31 |
0.18 |
0.3 |
5.6 |
2.7 |
- |
|
0.5 |
|
|||
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
6
6 |
0.7 |
2.0 |
- |
0.78 |
9.8 |
98.0 |
110. |
0.98 |
2.8 |
0.01 |
0.25 |
0.25 |
0.3 |
1.6 |
2.5 |
- |
0.62 |
|
|
|
|
|
|
|
0 |
|
|
5 |
|
|
|
|
|
|
|
7 |
0.4 |
1.0 |
1.28 |
- |
8.2 |
102. |
105. |
0.8 |
2.0 |
0.01 |
0.28 |
0.15 |
0.35 |
6.4 |
6.4 |
- |
0.4 |
|
|
|
|
|
|
5 |
0 |
|
|
|
|
|
|
|
|
|
|
8 |
0.5 |
2.0 |
- |
0.82 |
7.3 |
81.2 |
98.0 |
0.73 |
2.5 |
0.02 |
0.41 |
0.21 |
0.41 |
5.6 |
4.7 |
- |
0.85 |
9 |
0.3 |
2.5 |
1.3 |
- |
8.7 |
87.0 |
95.0 |
1.6 |
2.1 |
0.03 |
0.38 |
0.22 |
0.31 |
2.7 |
2.7 |
- |
0.5 |
10 |
0.6 |
2.0 |
- |
0.85 |
9.8 |
98.0 |
102. |
0.42 |
1.5 |
0.01 |
0.25 |
0.13 |
0.25 |
1.8 |
1.6 |
- |
0.6 |
|
|
|
|
|
|
|
0 |
|
|
6 |
|
|
|
|
|
|
|
11 |
0.7 |
2.0 |
1.4 |
- |
12.3 |
94.6 |
107. |
0.72 |
1.8 |
0.04 |
0.35 |
0.28 |
0.2 |
5.4 |
2.4 |
- |
1.7 |
|
|
|
|
|
|
|
0 |
|
|
3 |
|
|
|
|
|
|
|
12 |
0.8 |
2.5 |
- |
0.73 |
14 |
100. |
110. |
1.5 |
1.9 |
0.02 |
0.32 |
0.15 |
0.38 |
- |
- |
1.5 |
0.8 |
|
|
|
|
|
|
7 |
0 |
|
|
|
|
|
|
|
|
|
|
13 |
0.5 |
3.0 |
1.32 |
- |
13.2 |
88.0 |
98.0 |
1.15 |
2.3 |
0.02 |
0.4 |
0.21 |
0.3 |
3.6 |
3.3 |
- |
0.85 |
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
14 |
0.5 |
2.0 |
- |
0.78 |
15 |
122. |
130. |
1.3 |
2.2 |
0.02 |
0.4 |
0.19 |
0.41 |
- |
- |
1.8 |
0.9 |
|
|
|
|
|
|
5 |
0 |
|
|
4 |
|
|
|
|
|
|
|
15 |
0.7 |
2.5 |
1.25 |
- |
12.5 |
125. |
130. |
0.84 |
2.1 |
0.01 |
0.35 |
0.15 |
0.42 |
7.4 |
5.1 |
- |
0.7 |
|
|
|
|
|
|
0 |
0 |
|
|
7 |
|
|
|
|
|
|
|
7
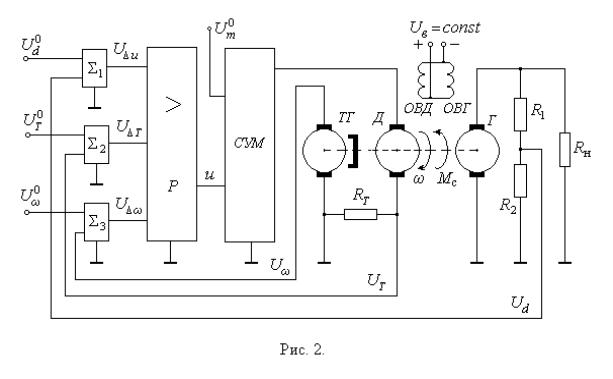
заданного напряжения стабилизации Uн0 и действительного напряжения на нагрузке Uн , измеряемого делителем R1, R2. Кроме того, на регулятор могут подаваться сигналы, пропорциональные отклонениям скорости и тока якоря приводного двигателя от заданных значений. При этом скорость двигателя изменяется тахогенератором ТГ, а ток якоря измеряется с помощью резистора RТ.
Система работает следующим образом. При номинальной нагрузке Rн0 в цепи якоря генератора протекает ток iн0 , который обеспечивает напряжение на нагрузке Uн0 iн0 Rн0 , равное заданному значению. При этом э.д.с. генератора ЕG0 iн0 (RG Rн0 ) , где RG активное сопротивление якорной цепи, обеспечивается скоростью вращения приводного двигателя ω0 , которая в свою очередь определяется напряжением U m0 , снимаемого в этом режиме с суммирующего усилителя мощности. Значения напряжений задатчиков выбраны равными по величине и противоположными по знаку соответствующим напряжениям измерителей для номинального режима, так что в этом режиме сигналы на выходах сумматоров Σk (k 1,2,3) отсутствуют, и управляющее воздействие с выхода регулятора равно нулю.
При изменении нагрузки RН изменяется ток генератора iн . Это приводит, с одной стороны, к изменению падения напряжения на внутреннем сопротивлении генератора, а с другой, к изменению э.д.с. генератора ЕG .
8
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Показатели качества |
|
|
Параметры объекта |
|
|
|
|
Параметры |
|
Режим |
Изм |
||||||||||
|
|
|
|
|
|
|
|
стабилиза |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
измерителей |
|
ене |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ции |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ние |
||
№ |
|
|
|
|
|
|
|
Постоянны |
|
|
|
|
|
|
|
|
|
|
|
|||
Ош |
Вре |
Пок |
Рад |
Соп |
Инд |
Мо |
Инд |
Соп |
|
|
|
|
Коэ |
|
|
|
|
соп |
||||
|
е двигателя |
|
|
|
|
|
|
|
|
|||||||||||||
|
ибк |
мя |
азат |
иус |
роти |
укти |
мен |
укти |
роти |
|
|
|
|
ф. |
|
|
|
|
рот |
|||
в |
|
и |
|
|
|
|
|
|
|
|
||||||||||||
а |
регу |
ель |
усто |
влен |
вн. |
т |
|
вн. |
влен |
|
|
|
|
пер |
|
|
|
|
ивл |
|||
а |
генератора |
|
|
|
|
|
|
|
|
|||||||||||||
регу |
лир |
коле |
йчи |
ие |
якор |
инер |
якор |
. |
|
|
|
|
еда |
|
|
|
|
ени |
||||
р |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
лир |
ован |
бате |
вост |
якор |
я |
ц. на |
|
|
|
я |
якор |
|
|
|
|
чи |
|
|
|
|
я |
|
и |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
ован |
ия |
льн |
и |
я |
двиг |
валу |
|
|
|
гене |
я |
|
|
|
|
тах |
|
|
|
|
наг |
|
а |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
ия |
|
ости |
|
двиг |
ател |
дв. |
|
|
|
рато |
гене |
R |
|
R |
2 |
оге |
|
R |
U 0 |
R0 |
руз |
|
н |
|
|
|
R* |
|
|
|
се |
|
см |
|
|
1 |
|
|
|
|
Т |
вых |
н |
ки |
|
|
|
|
ател |
я |
|
|
ра |
рато |
кОм |
|
кОм |
нер |
|
Ом |
в |
Ом |
||||||
та |
u* |
t*p |
М* |
|
|
|
|
|||||||||||||||
|
я |
|
Jд |
в сек |
|
нм/а |
|
ра |
|
|
|
|
ат. |
|
|
|
|
R |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
в |
|
|
|
Rя |
Lя |
н м |
|
|
|
Lг |
Rг |
|
|
|
|
kтг |
|
|
|
|
н |
|
сек |
|
|
|
|
|
|
|
|
|
|
|
|
|
Ом |
|||||||
|
|
|
|
|
Ом |
гн |
сек 2 |
|
|
|
г н |
Ом |
|
|
|
|
в сек |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0.4 |
2.5 |
1.2 |
- |
4.5 |
1.0 |
0.01 |
0.28 |
|
0.21 |
2.0 |
5.0 |
6.4 |
|
5.1 |
0.4 |
|
- |
100 |
10 |
5 |
|
|
|
|
|
|
|
|
05 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
0.5 |
3.0 |
1.15 |
- |
2.2 |
2.0 |
0.02 |
0.35 |
|
0.31 |
3.2 |
4.0 |
8.1 |
|
5.1 |
- |
|
2.7 |
120 |
10 |
6 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
0.6 |
2.5 |
- |
0.8 |
5.1 |
1.5 |
0.02 |
0.51 |
|
0.42 |
3.0 |
6.0 |
20 |
|
10 |
0.2 |
|
- |
150 |
12 |
7 |
|
|
|
|
|
|
|
|
95 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
0.4 |
4.0 |
- |
0.85 |
2.8 |
2.5 |
0.03 |
0.42 |
|
0.32 |
4.0 |
4.5 |
16 |
|
16 |
- |
|
2.1 |
100 |
12 |
7 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
0.5 |
2.0 |
1.25 |
- |
4.8 |
1.0 |
0.01 |
0.48 |
|
0.35 |
2.0 |
4.8 |
16 |
|
10 |
0.3 |
|
- |
120 |
10 |
5 |
|
|
|
|
|
|
|
|
75 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9
6 |
0.5 |
2.5 |
- |
0.9 |
5.0 |
1.5 |
0.03 |
0.61 |
0.38 |
2.0 |
8.5 |
16 |
8.2 |
0.2 |
- |
150 |
20 |
10 |
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
7 |
0.3 |
1.5 |
1.3 |
- |
3.5 |
0.8 |
0.00 |
0.25 |
0.21 |
1.2 |
4.3 |
3.9 |
7.5 |
- |
1.5 |
90 |
8 |
4 |
|
|
|
|
|
|
|
53 |
|
|
|
|
|
|
|
|
|
|
|
8 |
0.2 |
1.5 |
- |
0.75 |
2.5 |
0.9 |
0.00 |
0.27 |
0.25 |
1.8 |
5.2 |
5.1 |
10 |
- |
2.0 |
60 |
10 |
6 |
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
|
9 |
0.3 |
2.0 |
- |
0.8 |
4.3 |
1.0 |
0.01 |
0.31 |
0.21 |
2.0 |
4.1 |
5.1 |
5.6 |
0.3 |
- |
80 |
9 |
5 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
1 |
0.4 |
1.5 |
1.35 |
- |
3.0 |
1.2 |
0.01 |
0.41 |
0.35 |
1.5 |
5.1 |
10 |
4.7 |
- |
2.2 |
100 |
12 |
7 |
0 |
|
|
|
|
|
|
38 |
|
|
|
|
|
|
|
|
|
|
|
1 |
0.4 |
1.5 |
- |
0.85 |
3.8 |
0.8 |
0.02 |
0.45 |
0.31 |
1.4 |
3.5 |
20 |
10 |
0.2 |
- |
110 |
11 |
6 |
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
1 |
0.5 |
2.0 |
1.2 |
- |
3.2 |
2.0 |
0.03 |
0.51 |
0.41 |
3.0 |
5.0 |
10 |
5.1 |
- |
2.2 |
120 |
10 |
5 |
2 |
|
|
|
|
|
|
87 |
|
|
|
|
|
|
|
|
|
|
|
1 |
0.5 |
3.0 |
1.3 |
- |
5.5 |
1.8 |
0.03 |
0.48 |
0.35 |
4.0 |
6.5 |
16 |
8.2 |
0.4 |
- |
130 |
15 |
8 |
3 |
|
|
|
|
|
|
05 |
|
|
|
|
|
|
|
|
|
|
|
1 |
0.6 |
2.5 |
- |
0.9 |
6.0 |
2.4 |
0.04 |
0.52 |
0.42 |
4.0 |
6.1 |
10 |
6.4 |
0.3 |
- |
120 |
12 |
7 |
4 |
|
|
|
|
|
|
37 |
|
|
|
|
|
|
|
|
|
|
|
1 |
0.4 |
2.0 |
1.25 |
- |
2.0 |
1.5 |
0.03 |
0.48 |
0.41 |
3.0 |
4.8 |
10 |
5.1 |
- |
3.0 |
110 |
10 |
5 |
5 |
|
|
|
|
|
|
54 |
|
|
|
|
|
|
|
|
|
|
|
10