

3563
.pdfМинистерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования
«Воронежский государственный лесотехнический университет им. Г.Ф. Морозова»
АВТОМАТИЗАЦИЯ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
ЛЕСОЗАГОТОВИТЕЛЬНЫХ И ДЕРЕВОПЕРЕРАБАТЫВАЮЩИХ
ПРОИЗВОДСТВ
Методические указания
кпрактическим занятиям для студентов по направлению подготовки 35.04.02 –
Технология лесозаготовительных и деревоперерабатывающих производств;
Магистерская программа "Лесозаготовительное производство"
Воронеж, 2016
2
УДК 658.5.011.56
Поляков, С. И. Автоматизация технологических процессов лесозаготовитель-
ных и деревоперерабатывающих производств [Текст]: метод. указания к прак-
тическим занятиям для студентов по направлению подготовки 35.04.02 - Тех-
нология лесозаготовительных и деревоперерабатывающих производств; Маги-
стерская программа "Лесозаготовительное производство" / С. И. Поляков; Мин-
во обр-я и науки Рос. Фед., ФГБОУ ВО «ВГЛТУ». – Воронеж, 2016. 23 с.
Печатается по решению учебно-методического совета ФГБОУ ВО «ВГЛТУ».
Рецензент: профессор кафедры автоматизации технологических процес-
сов и производств Воронежского государственного архитектурно-
строительного университета В.И. Акимов
3
Введение
Дисциплина «Автоматизация технологических процессов и производств» является заключительной в подготовке бакалавров в области автоматизации технологических и производственных процессов. Поэтому приведенные в настоящих методических указаниях типовые схемы управления, методики расчета электромеханических объектов рассматриваются с точки зрения эксплуатации их в составе автоматизированных систем управления. Расчет и выбор электродвигателя, определение его передаточных функций, расчет измерителя рассогласования и потенциометрического преобразователя выполнен как составная часть расчета контура автоматического регулирования.
Предложенные методики могут быть использованы как в курсовом проектировании для соответствующей дисциплины, так и при выполнении выпускной квалификационной работы бакалавра.
Практическая работа №1
Изучение схем управления электроприводом транспортирующих и грузоподъемных устройств
1 Постановка задачи Транспортирующие и грузоподъемные устройства применяются во всех
отраслях лесного комплекса и деревообрабатывающей промышленности и даже на тех производствах, где технологическая автоматика в виде систем с обратной связью отсутствует.
Как правило, все указанные механизмы строятся на основе электропривода, чаще переменного тока, которым управляют различные технологические датчики, причем схемы электропривода являются типовыми.
4
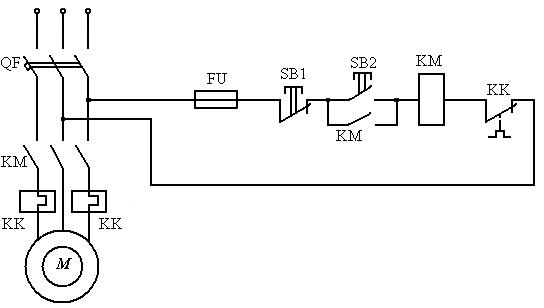
Рис. 1 Схема автоматического нереверсивного управления трехфазным короткозамкнутым двигателем
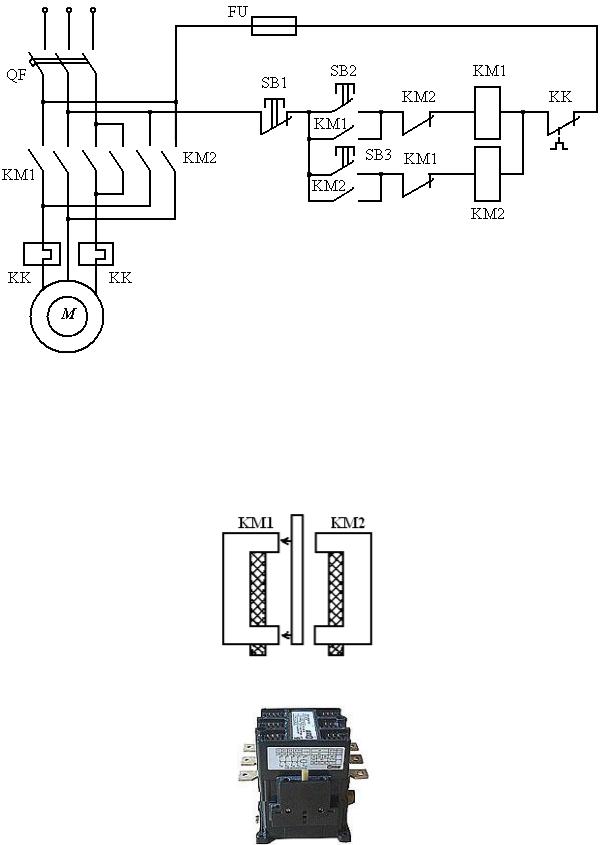
Рис. 2 Схема автоматического реверсивного управления трехфазным короткозамкнутым двигателем
КМ1 и КМ2 - магнитные пускатели (контакторы). Магнитный пускатель - малогабаритный контактор специального исполнения. Принцип действия реверсивного магнитного пускателя схематично показан на рис. 3, а внешний вид
– на рис. 4.
Рис. 3 Схема реверсивного магнитного пускателя
Рис. 4 Внешний вид магнитного пускателя ПМЕ 224/234 реверс
5
Пускатели предназначены для пуска, остановки и реверсирования трѐхфазных асинхроных электродвигаелей с короткозамкнутым ротором, а также их защиты от перегрузок по току недопустимой продолжительности.
Как к элементу систем автоматического управления к электромагнитным пускателям предъявляются высокие требования по износостойкости. Классы изностостойкости: А, Б и В. Пускатели производятся в исполнениях с различной степенью защиты от прикосовений и внеших воздействий (IP00, IP20, IP40, IP54). Климатическое исполнение и категории размещения по ГОСТ
15150-69 и ГОСТ 15543.1-89.
Рис. 5 Схема автоматического динамического торможения трехфазного короткозамкнутого двигателя
Торможение противовключением
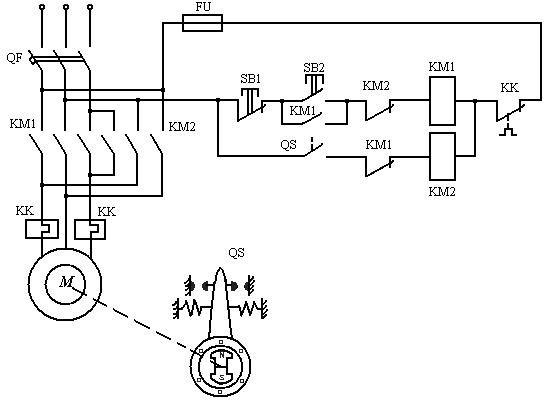
Для автоматизации торможения противовключением на двигателе устанавливают реле контроля скорости (РКС).
Упругие элементы РКС настраиваются таким образом, чтобы контакты QS замыкались при скорости равной 10-15% от номинального значения: ω= (0,1÷0,15)ωн.
6
Рис. 6 Схема торможения противовключением трехфазного электродвигателя с короткозамкнутым ротором
Схема управления трехфазным электродвигателем с фазным ротором
Чаще всего управление подобным приводом осуществляют в функции времени, в частности, по этому принципу осуществляют запуск двигателя.
Подобные приводы встречаются на транспортирующих и грузоподъемных машинах.
7
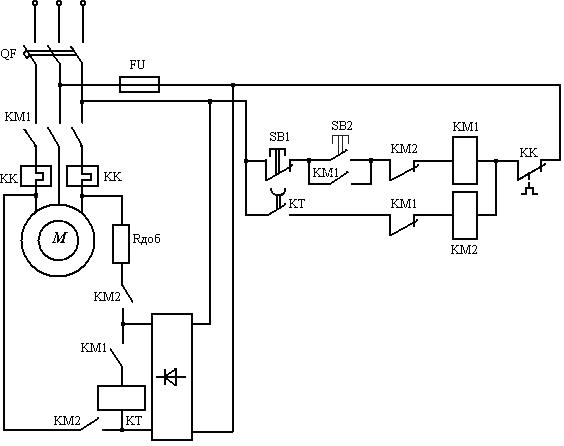
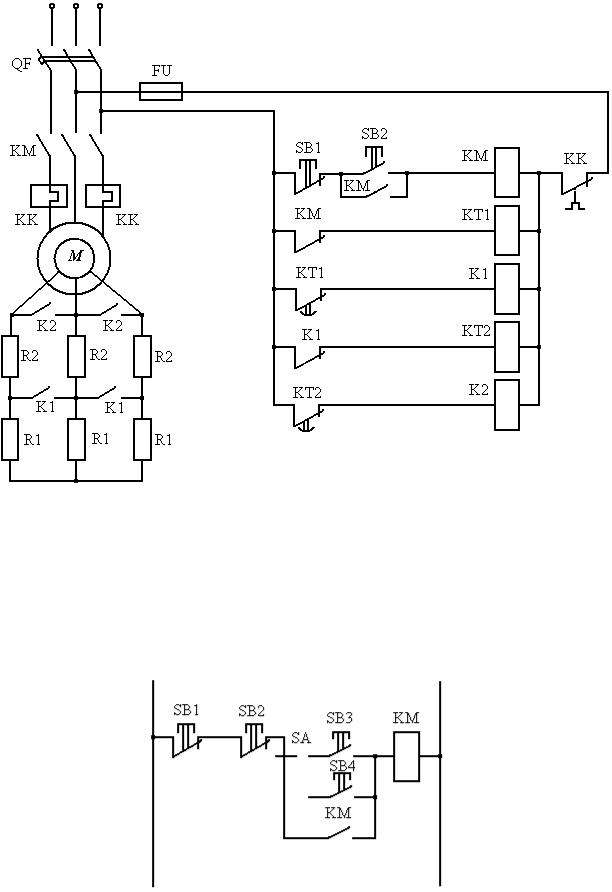
Рис. 7 Схема управления двигателем с фазным ротором
Перечисленные типовые схемы не только могут быть скомпонованы из отдельной аппаратуры, но и выпускаться промышленностью комплектно в виде так называемой станции управления.
К типовым относят также схему, позволяющую переходить с дистанционного управления приводом на местное управление и наоборот. Такой переход необходим при пусконаладочных работах; задача решается установкой переключателя режимов работы.
Рис. 8 Схема управления с переключателем работ

8
Кнопка «ПУСК» SB3 находится на пульте дистанционного управления, SB4 - на пульте местного управления, тоже и кнопка «СТОП». Переключатель SA обычно находится на пульте дистанционного управления.
Новые ГОСТы для переключателей SA допускают и другое начертание.
Рис. 9 Обозначение переключателя режима работ
2 Выполнение работы
1.Ознакомиться с составом, принципом действия принципиальных схем управления.
2.Описать работу приведенных схем.
Практическая работа №2
Расчет исполнительного устройства на базе исполнительного электродвигателя
Исходными данными для выбора мощности двигателя являются: постоянный (статический) момент нагрузки M ст , значение частоты вращения вала
рабочего органа н и угловое ускорение н , а также момент инерции нагрузки J н (табл. 1).
Таблица 1
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
M ст , Н м |
500 |
750 |
100 |
125 |
150 |
175 |
200 |
225 |
250 |
300 |
|
|
|
|
|
|
|
|
|
|
|
J н , кг м2 |
500 |
600 |
800 |
1000 |
1500 |
2000 |
2400 |
3000 |
4000 |
4500 |
н , 1 с |
1,2 |
1,1 |
1,0 |
0,5 |
0,4 |
0,2 |
0,15 |
0,11 |
0,10 |
0,10 |
|
|
|
|
|
|
|
|
|
|
|
н , 1 с 2 |
1,2 |
1,1 |
1,0 |
0,9 |
0,8 |
0,7 |
0,6 |
0,5 |
0,4 |
0,3 |
|
|
|
|
|
|
|
|
|
|
|
Указания к решению задачи

9
Движущий момент за вычетом динамического момента инерции двигателя, очевидно, равен сумме статического и динамического моментов нагрузки с учетом передаточного числа рабочего механизма (без учета КПД передачи):
M дв дв J дв |
|
M ст н J н |
, |
(1) |
|
||||
|
|
i |
|
|
или
M |
|
i |
|
|
J |
|
|
M ст н J н |
, |
||||||
дв |
н |
дв |
|
||||||||||||
|
|
|
|
|
|
|
|
i |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
ст |
|
|
J |
н |
|
|
|
|
|||
Mдв |
|
|
|
|
|
|
i Jдв |
|
н . |
||||||
|
i |
|
|
i |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
(2)
(3)
Значение оптимального передаточного числа, требующего минимальный момент двигателя при заданном ускорении н , находят из условия d M дв  di 0 .
di 0 .
Дифференцируя уравнение (3) |
по i , получим |
|
|
|
|
|
|
|
|
|
|
||||||||||
0 |
M |
ст |
|
J |
н |
н |
J дв н |
, |
откуда |
M ст J н |
н |
J дв |
н , |
(4) |
|||||||
i |
2 |
|
i 2 |
|
|
i 2 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
т.е. |
|
i02 |
|
M ст J н н |
, |
или i0 |
|
M ст J н н |
. |
|
(5) |
||||||||||
|
|
J дв н |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
J дв н |
|
|
|
|
|
||||
Подставляя значение i в уравнение (3), получим M тр |
– потребный мо- |
||||||||||||||||||||
мент двигателя при оптимальном передаточном числе редуктора. |
|
||||||||||||||||||||
С учетом значения i0 |
|
определим требуемую мощность исполнительного |
|||||||||||||||||||
двигателя: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
1 |
M i |
|
1 |
|
M |
|
J |
|
|
|
|
J i ; |
|
|
|||||||||||
|
|
|
|
|
|
|
ст |
н |
н |
|
|
||||||||||||||||||||
|
|
|
|
тр |
|
|
дв 0 |
н |
|
|
|
н |
|
|
|
|
|
|
|
|
дв н 0 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
1 |
|
|
|
|
|
J |
дв |
|
н |
M |
ст |
J |
|
н |
|
|
2 |
н M |
|
J н н , |
|||||||||
Pтр |
|
|
|
н M |
|
J н н |
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|||||||||
|
ст |
|
|
|
|
|
|
J дв н |
|
|
|
|
|
|
|
ст |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где обычно 0,8 0,9 (КПД передачи). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
Pтр |
|
2н Mст Jн н |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
975 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
(6)
(7)
(7а)
Из этого выражения следует, что при i i0 мощность, потребляемая на-
грузкой, и мощность на разгон ротора двигателя равны. Двигатель выбирают из каталога по первому условию достаточной величины его номинальной мощности: Pном Pтреб . При этом находят и значения nном ; M ном ; J дв ; I и T (номинальные значения оборотов в минуту, момента, напряжения управления – питания, тока якоря и постоянную времени).
Поскольку условие Pном Pтреб иначе можно представить в виде
M ном ном M треб треб , то при достаточной мощности двигателя он может не подойти либо по скорости (если ном треб ), либо по моменту (если M ном M треб ).
10
Выбранный двигатель проще вначале проверить по условию обеспечения
требуемой скорости выходного вала ИУ: |
(8) |
|
|
ном треб |
i0 н . |
Если условие (8) выполняется, следует проверить двигатель на соответствие требуемому моменту нагрузки:
|
|
|
|
|
M |
ст |
|
J |
н |
M |
|
M |
|
|
|
|
|
||
ном |
треб |
|
|
|
|
||||
|
|
|
i0 |
|
i0 |
||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
J |
|
i |
|
|
|
. |
|
дв |
0 |
|
(9) |
||||
|
|
|
н |
|
|||
|
|
|
|
|
|
|
|
Если условие (9) не выполняется, допустимо проверку выполнять по условию
M пуск |
M треб |
, |
где M пуск 2M ном . |
|
(10) |
|
|
|
При проверке по значению M пуск |
дополнительно следует проверить усло- |
|
вие обеспечения установившегося режима: |
(11) |
|||
M |
ном M |
ст i0 . |
||
|
||||
Если двигатель необходимой мощности не обеспечивает требуемых значений скорости и момента (или при изменении передаточного числа для обеспечения скорости только момента), необходимо либо выбрать двигатель той же мощности, но с иным числом пар полюсов (или иным значением ном ), либо пе-
рейти к проверке двигателя следующего значения Pном из ряда значений мощности.
|
Пример расчета |
|
|
Исходные данные: выбрать ИД, если |
момент статической нагрузки |
||
M ст 2500 |
Н м ; момент инерции нагрузки Jн |
5000 |
кг м2 ; требуемая скорость |
нагрузки н 0,32 |
рад с ; требуемое ускорение нагрузки н 0,34 рад с2 . |
|||||||||||||||||||
Расчет: 1. Принимаем ориентировочно КПД редуктора 0,9 . |
||||||||||||||||||||
2. Требуемая мощность ИД при этом согласно уравнению (7) |
||||||||||||||||||||
P |
2 |
|
|
M |
|
|
J |
|
|
|
|
|
2 2500 5000 0,34 |
0,32 3,06 кВт. |
||||||
|
н |
ст |
н |
|
|
|
|
|||||||||||||
тр |
|
|
|
н |
|
|
|
|
|
|
|
0,9 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
По полученной мощности из табл. 2 выбираем двигатель МИ-42. Техни- |
||||||||||||||||||||
ческие данные ИД: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pном |
3,2 |
|
кВт ; |
|
nном |
|
|
2500 об мин ; U ном 110 В ; |
||||||||||||
M ном 12,5 |
|
Н м ; |
|
Jдв |
|
|
662 10 4 кг м2 ; I ном 36,3 A ; |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
Rя 0,06 Ом . |
||||||||||
3. Оптимальное передаточное отношение редуктора: |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
i |
|
|
|
Mст Jн н |
|
|
|
2500 5000 0,34 |
|
431. |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
0 |
|
|
|
J |
|
|
|
|
|
|
|
662 10 4 0,34 |
||||||
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
дв |
|
|
|
|
|
|
|
|
|
|
|
||
4. Проверка по скорости: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
ном |
nном |
|
3,14 2500 |
262 рад с . |
||||||||||||
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
30 |
|
|
|
|
||