

2547
.pdf11 |
|
|
SОБГ SМ |
S0 , м. |
(8) |
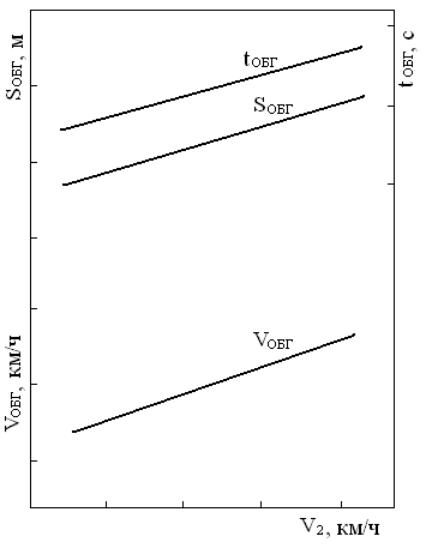
4. Для определения скорости в момент завершения обгона необходимо из точки tм опустить вниз перпендикуляр до пересечения с кривой V1= f(t), т.е. зависимостью «время-скорость» для обгоняющего ТС в момент завершения обгона - Vобг.
Рис. 4. Показатели обгона ТС
Полученные значения показателей завершенного обгона необходимо занести в табл. 2 и табл. 3.
|
|
|
|
Таблица 2 |
|
|
|
|
|
|
|
V2, км/ч |
S0, м |
t0, c |
Sм, м |
tм, c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3 |
|
|
|
|
|
|
V2, км/ч |
VОБГ, км/ч |
tОБГ, c |
SОБГ , м |
|
|
|
|
|
|
|
|
|
|
|
12
На основании полученных данных необходимо построить график изменения параметров обгона в зависимости от скорости обгоняемого ТС (рис. 5).
Рис. 5. График изменения параметров обгона
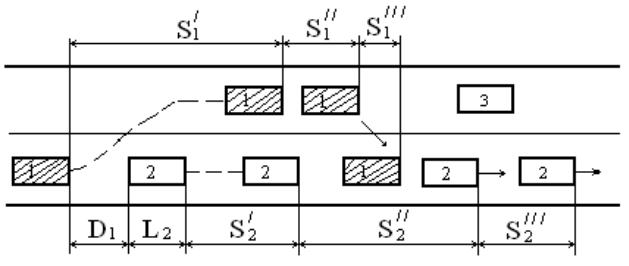
5. Незавершенный обгон
Выше был рассмотрен обгон, в процессе которого обгоняющий автомобиль возвращается на свою полосу движения впереди обгоняемого автомобиля. В практике часто встречаются случаи, когда водителю, начавшему обгон, не удается его закончить. Причина может заключаться либо во внезапном появлении препятствия, либо в неверном первоначальном расчете. Убедившись в невозможности закончить обгон, водитель вынужден уменьшить скорость и возвратиться в прежнее положение. Такой обгон называют незавершенным
(рис. 6).
13
Рис. 6. Незавершенный обгон
В начале незавершенного обгона (время t /) обгоняющий автомобиль, двигаясь со скоростью V1, выезжает на соседнюю полосу движения. Решив отказаться от обгона, водитель снижает скорость автомобиля до минимально устойчивой скорости V1/. Учитывая наличие опасности для движения, водитель тормозит обычно с максимальной интенсивностью (время t //). Затем, ведя автомобиль с минимально устойчивой скоростью, водитель пропускает вперед обгоняемый автомобиль и возвращается на прежнюю полосу (время t ///). Возможность выполнения такого маневра зависит как от тяговой, так и от тормозной динамичности автомобиля.
Определим время и путь незавершенного обгона. Перемещение обгоняющего автомобиля на первом этапе обгона
|
|
|
V1t |
|
, |
|
|
|
(9) |
||
S1 |
|
|
|
|
|||||||
где t – время первого этапа, с. |
|
|
|
|
|
|
|
|
|
|
|
Перемещение обгоняемого автомобиля за время первого этапа |
|
||||||||||
S |
|
|
|
|
. |
|
|
|
(10) |
||
2 |
V2t |
|
|
|
|
||||||
Время первого этапа |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D1 L2 |
e |
|
||||||
|
|
|
|
|
|
|
|
|
|||
t |
V |
|
V |
, |
(11) |
||||||
|
|
||||||||||
|
|
|
|
|
1 |
|
2 |
|
|
|
|
где D1 – дистанция безопасности, м;
e – расстояние между передними частями обгоняющего и обгоняемого автомобилей в момент окончания первого этапа, м.
|
14 |
|
Время второго этапа |
|
|
t |
V1 V1 , |
(12) |
|
jз |
|
где V1 – минимально устойчивая скорость 3 – 5 м/с; jз – замедление, м/с2.
Перемещение обгоняющего автомобиля в течение второго этапа обгона
|
|
V1t |
|
0.5 jз t |
|
2 |
|
|
|
(13) |
|||||
S1 |
|
|
. |
|
|
|
|||||||||
Время третьего этапа обгона |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
S |
|
L D S |
e |
. |
(14) |
||||||||
1 |
|
|
2 |
2 |
|
2 |
|
|
|||||||
|
|
|
|
|
V2 |
V1 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Путь обгоняющего автомобиля за время третьего этапа |
|
||||||||||||||
|
|
|
S L D S e |
|
(15) |
||||||||||
|
|
1 |
|
|
2 |
2 |
|
2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||
S1 |
|
|
|
|
|
|
V2 |
V1 |
|
|
|
V1 . |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Зная продолжительность каждого этапа и перемещения обгоняющего ав- |
|||||||||||||||
томобиля, можно найти и полный путь незавершенного обгона |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(16) |
SН .О S1 |
S1 |
S1 . |
|
|
|
||||||||||
Соответственно, время незавершенного обгона |
|
|
|||||||||||||
tН .О t t t . |
|
|
|
|
|
(17) |
|||||||||
Полученные значения показателей незавершенного обгона сводят в таблицы. По данным таблиц строится график изменения параметров незавершенного обгона в зависимости от скорости обгоняемого транспортного средства.
6. Тормозная динамичность автомобиля
Оценочными показателями тормозной динамичности автомобиля служат среднее замедление за период полного торможения и путь автомобиля от начала воздействия водителя на орган управления до остановки.
Водитель, заметив препятствие, оценивает дорожную обстановку, принимает решение о торможении, переносит ногу с педали подачи топлива на тормозную педаль.
Время tр, необходимое для этих действий, – время реакции водителя – обычно находится в пределах 0,3 … 2,5 с. Оно зависит от квалификации водителя, его возраста, степени утомления и других факторов.
15
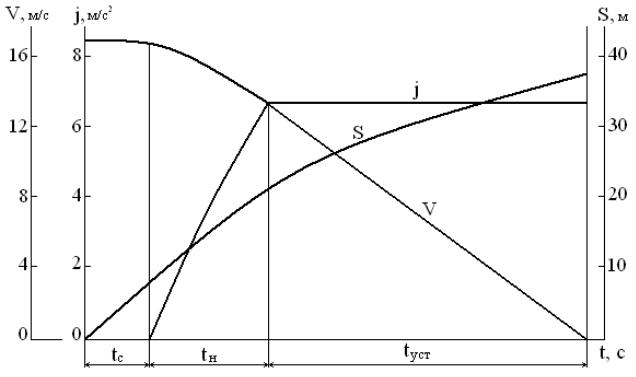
Время tс (время запаздывания тормозной системы) необходимо для устранения зазоров в соединениях тормозного привода и перемещения всех его деталей. Это время, зависящее от конструкции и технического состояния тормозного привода, колеблется в среднем от 0,2 … 0,3 с (гидравлический привод) до 0,6 … 0,8 с (пневматический привод).
Время tн (время нарастания замедления) обычно находится в пределах 0,4 … 0,6 с. Интервал времени tуст (время, при котором замедление постоянно) можно рассчитать по следующей формуле:
t уст |
|
VK |
э |
, |
(18) |
|
3.6g |
||||||
|
|
|
|
|||
где Кэ – коэффициент эффективности торможения.
У многих автомобилей достичь одновременной блокировки всех колес не удается как по причинам конструктивного характера, так и вследствие ухудшения эффективности тормозной системы и шин в процессе эксплуатации. Поэтому для приближения результатов расчета к фактическим данным в формулы вводят поправочный коэффициент Кэ. Примерные значения его для сухого асфальтобетонного или цементобетонного покрытия (φ = 0,7) даны в табл. 4.
При малом коэффициенте сцепления величина тормозных сил у любого автомобиля достаточна для доведения всех колес до скольжения. Поэтому при φ ≤ 0,7 следует принимать Кэ=1 для автомобилей всех типов.
|
|
Таблица 4 |
|
Коэффициент эффективности торможения |
|||
|
|
|
|
Автомобили |
Без нагрузки |
С полной нагрузкой |
|
|
|
|
|
Легковые |
1,1 … 1,15 |
1,15 … 1,2 |
|
|
|
|
|
Грузовые с максимальной массой |
1,1 … 1,3 |
1,5 … 1,6 |
|
до 10 т и автобусы длиной до 7,5 м |
|||
|
|
||
|
|
|
|
Грузовые с максимальной массой |
1,4 … 1,6 |
1,6 … 1,8 |
|
свыше 10 т и автобусы более 7,5 м |
|||
|
|
||
|
|
|
|
Учитывая коэффициент эффективности торможения, формулы для замедления и остановочного пути приобретают следующий вид:
j |
g |
|
|
|
K ; |
(19) |
|||
уст |
||||
|
|
|
||
э
16
|
|
|
SО tР tC 0.5tН |
V |
|
K V 2 |
|
|
|
||||||
|
|
|
|
э |
|
|
|
|
|||||||
|
|
|
|
g . |
|
(20) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
Полученные значения сводят в табл. 5. |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
V, |
Jуст, |
tр, |
tср, |
tн, |
|
tуст, |
|
|
Sост, |
|
Sт, |
|
Sю, |
||
км/ч |
м/с2 |
c |
c |
c |
|
c |
|
|
|
м |
|
м |
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
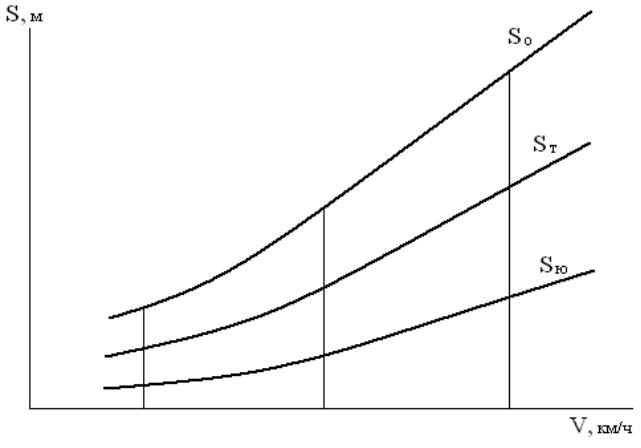
После заполнения табл. 5 необходимо построить тормозную диаграмму автомобиля (рис. 7) и график тормозного, остановочного путей и пути «юза»
(рис. 8).
Рис. 7. Тормозная диаграмма автомобиля
17
Рис. 8. График тормозного, остановочного путей и пути «юза»
7. Устойчивость автотранспортных средств
Устойчивость – совокупность свойств, определяющих положение автотранспортного средства или его звеньев при движении. Нарушение устойчивости АТС выражается в произвольном изменении направления движения, его опрокидывании или скольжении шин по дороге. Оценочными показателями устойчивости являются критические параметры движения и положения. Различают продольную и поперечную устойчивость автомобиля. Признаками потери поперечной устойчивости являются: изменение направления движения (курсовая устойчивость); поперечное скольжение (занос) и опрокидывание, а продольной устойчивости – буксование ведущих колес и опрокидывание.
Потеря автомобилем продольной устойчивости выражается, как правило, в буксовании ведущих колес, часто наблюдаемом при преодолевании автопоездом затяжных подъемов при скользкой дороге. Опрокидывание АТС в продольной плоскости возможно лишь при дорожно-транспортном происшествии.

18
Показателями курсовой устойчивости служат средняя скорость поперечного смещения без корректирующих воздействий со стороны водителя и средняя угловая скорость поворота рулевого колеса. Эти показатели определяют экспериментально при испытании АТС.
Показателями поперечной устойчивости автомобиля при криволинейном движении являются критические скорости (максимально возможные) по боковому скольжению и боковому опрокидыванию; критические углы косогора (угол поперечного уклона дороги) по боковому скольжению и по боковому опрокидыванию.
Критическая скорость автомобиля по заносу рассчитывается по формуле
VЗАН 11.3
 R y , км/ч, (21)
R y , км/ч, (21)
где φy – коэффициент поперечного сцепления;
R – радиус поворота автомобиля в соответствующей точке трассы. Коэффициент поперечного сцепления принимается равным
y 0.8x , |
|
(22) |
||
где φx – коэффициент продольного сцепления. |
|
|||
Радиус поворота подсчитывается по формуле |
|
|||
R L |
|
, |
(23) |
|
tgQСР |
|
|
||
где L – база автомобиля; |
|
|
|
|
QСР – средний угол поворота управляемых колес автомобиля. |
|
|||
QСР |
|
, |
(24) |
|
i |
||||
|
|
|
||
где α – угол поворота рулевого колеса;
i – передаточное отношение рулевого привода.
Критическая скорость по опрокидыванию определяется из выражения
VОПР 8 |
|
|
BR |
|
, |
(25) |
|
|
|
|
|||
hЦ |
|
G h2 |
|
|||
|
К КР |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
CYA GК hКР |
|
|
|
где B – колея автомобиля, м; |
|
|
|
|
|
|
hЦ – высота центра тяжести автомобиля, м; |
|
|
|
|||
GК – вес кузова, кг; |
|
|
|
|
|
|
hКР – плечо крена, м; |
|
|
|
|
|
|
CYA – суммарная угловая жесткость подвесок автомобиля, кг.м/рад. |
|
|||||

19
После проведения расчетов данные заносят в таблицу, и завершающим этапом является построение графиков зависимостей VЗАН=f(α), VОПР=f(α).
8. Компоновочные параметры автомобиля и их влияние на безопасность дорожного движения
8.1. Расчет ширины динамического коридора
Под динамическим коридором автотранспортного средства понимается ширина полосы дороги (проезжей части), необходимая для безопасного его движения с заданной скоростью.
На прямолинейном участке динамический коридор определяют по эмпирическим формулам следующего типа:
BK V BA 0,3 , |
(26) |
где – коэффициент, зависящий от квалификации водителя и его психофизиологического состояния, 0,015 0,054 ;
BA – габаритная ширина автомобиля, м;
V – скорость движения автомобиля, м/с.
Значения BA и скорость выбирают по заданию. Расчетные значения BK , м, полученные по формуле (26), указываются в табл. 6, по ним строят график зависимости динамического коридора от скорости автомобиля BK =f(V).
Таблица 6
V, км/ч
V, м/с
BK , м
На криволинейном участке дороги динамический коридор можно рассчитать на основании формулы
BK1 RН RВН , |
(27) |
где RН , RВН – наружный и внутренний габаритные радиусы поворота автомобиля;
BK1 – габаритная ширина проезжей части дороги в статике, т.е. без учета скорости и поправочного коэффициента (запаса), принимаемого в расчетах равным 0,3.

20
Как известно, средний радиус поворота (траектория движения точки пересечения оси заднего моста и продольной оси автомобиля) определяется по формуле
R |
L |
, |
(28) |
СР tg
где L – база автомобиля, м;
– угол поворота управляемых колес, град.
Задаваясь величиной угла , по формуле (28) определяют которого заносят в табл. 7.
Видно, что
RВН RСР B2A ;
RСР , значения
(29)
|
|
|
|
, |
|
RН |
|
L C1 2 RВН |
BА 2 |
(30) |
|
где C1 – передний свес автомобиля. |
|
|
|
||
Расчетные значения RВН , |
RН , BK1 заносят в табл. 7. |
|
|||
Для расчета динамического коридора BK на криволинейном участке, в зависимости от скорости и угла поворота управляемых колес, значения V задаются с учетом показателей устойчивости АТС, а предельное значение задается по техническим характеристикам автомобиля. Все значения BK , рассчитанные по формуле (26), подставляя в неѐ вместо BA значения BK1 , заносят в табл. 7 и строят графики зависимости динамического коридора от угла поворота управляемых колес при различных значениях скорости автомобиля.
|
|
|
|
|
|
|
Таблица 7 |
|
|
|
|
|
|
|
|
|
|
|
2 |
4 |
8 |
12 |
16 |
20 |
|
24 |
|
|
|
|
|
|
|
|
|
RСР , м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RВН , м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RН , м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B1 |
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BК .КР , м (V= км/ч) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BК .КР , м (V= км/ч) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BК .КР , м (V= км/ч) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|