

2427
.pdf11
2.3Математические модели разомкнутых САУ
срегуляторами различных типов
Вп. 2.1, 2.2 показано, что о свойствах САУ с регуляторами различных типов можно судить по их амплитудно-частотным W(ω) и фазо-частотным
F(ω) характеристикам. В рамках курсовой работы для построения графиков W(ω) и F(ω) целесообразно воспользоваться следующими математическими
моделями регуляторов:
- передаточная функция П-регулятора имеет вид
W( p) = K1;
- передаточная функция ПД-регулятора имеет вид
W( p) = K1 (1+ pT1 );
- передаточная функция ПИ-регулятора имеет вид
W( p) = K1 (1+ pT1 ); p
- передаточная функция ПИД-регулятора имеет вид
W(p) = K1 (1+ pT1)(1+ pT3 ). p
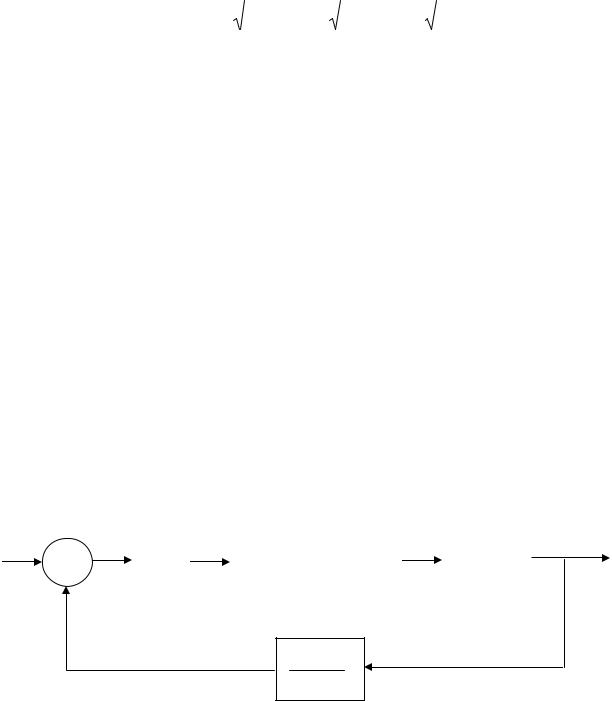
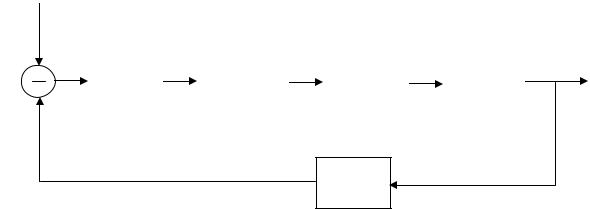
Выражения для АЧХ и ФЧХ получают из выражения для передаточной функции разомкнутой САУ. Для САУ, структурная схема которой приведена на рис. 4, выражение для передаточной функции разомкнутой САУ получают, перемножая передаточные функции всех динамических звеньев, образующих контур регулирования:
|
|
|
|
W(p) = |
K1 K2 K3 K4 |
|
|
. |
|
|
||||||
|
|
|
|
(1+pT )(1+pT )(1+pT ) |
|
|
||||||||||
|
|
|
|
|
|
|
2 |
4 |
|
|
|
6 |
|
|
|
|
Uв |
|
U |
|
J |
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
M |
|
|
|
|
|
||||
K1 |
|
|
K2 |
|
|
|
|
|
K3 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
(1+ pT2 )(1+ pT4 ) |
|
|
|
|
1 + pT6 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
Uт
K4
Рис. 4 Структурная схема САУ с П-регулятором (пример)
12
Заменяя p на jω , получим частотную передаточную функцию разомкнутой САУ:
W( jω) = |
K1 K2 K3 K4 |
|
. |
|
(1+ jωT )(1+ jωT )(1+ jωT ) |
||||
|
2 |
4 |
6 |
|
Определяя модуль W( jω), получим АЧХ разомкнутой САУ:
W(ω) = |
|
K1 K2 K3 K4 |
||||||
|
|
|
|
|
|
|
||
1+(ωT )2 |
1+(ωT )2 |
1+(ωT )2 . |
||||||
|
||||||||
|
2 |
4 |
6 |
|
||||
Определив зависимость от частоты ω фазового угла, получим выражение для ФЧХ разомкнутой САУ:
F(ω) = −(arctg(ωT2)+ arctg(ωT4)+ arctg(ωT6)).
Если неизменяемая часть САУ астатическая, то исследуются регуляторы типа П и ПД, а для статических САУ исследуются регуляторы всех четырех вышеприведенных типов.
2.4 Проверочный расчет на ЭВМ динамических характеристик САУ
Расчет динамических характеристик САУ выполняется для проверки правильности подбора регулятора и наглядного подтверждения выполнения заданных требований к качеству регулирования. Данный расчет осуществляется на ЭВМ путем построения графика переходного процесса разработанной САУ и определения на нем параметров качества регулирования S,D,T.
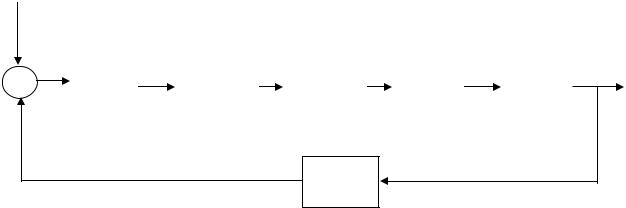
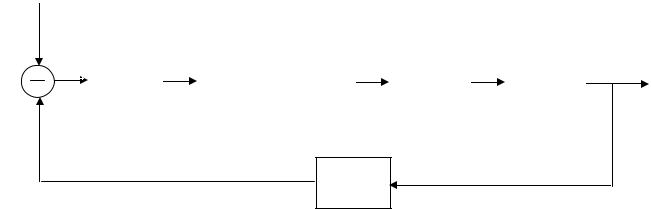
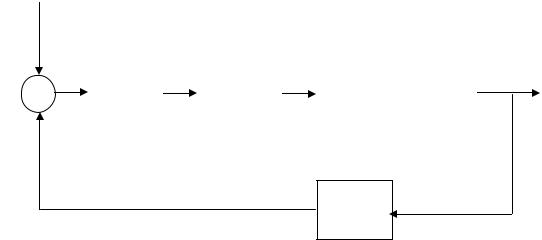
Переходная характеристика САУ получается в результате решения системы дифференциальных уравнений замкнутой САУ с выбранным типом регулятора. Составление и преобразование системы дифференциальных уравнений САУ осуществляется следующим образом. Рассмотрим в качестве примера САУ, структурная схема которой приведена на рис. 5.
|
|
|
1 блок |
|
|
2 блок |
|
|
|
|
3 блок |
|||
Uв |
|
U |
|
J |
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
M |
|
|
|
|
||||
|
|
|
|
|
|
K3 |
|
|||||||
K1 |
|
K2 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
(1+ pT2 )(1+ pT4 ) |
|
|
|
1 + pT6 |
|
||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||
Uт
4 блок
K4
1 + pT8
Рис. 5 Структурная схема САУ (пример)

13
Формирование системы уравнений начинают с последнего блока прямой ветви структурной схемы:
T |
dI |
|
+ I = K |
3 |
M - для блока 3, |
|||||||||
|
||||||||||||||
6 |
|
dt |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
T2T4 |
d 2M |
+ (T2 +T4 ) |
dM |
+ M = K2 J - для блока 2, |
||||||||||
|
|
|
||||||||||||
|
|
|
|
dt |
2 |
|
|
|
|
|
|
dt |
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
J = K1U - для блока 1, |
||||||||||||||
U = Uв − Uт - для блока сравнения, |
||||||||||||||
T |
|
dUт |
+ U |
т |
= K |
4 |
I - для блока обратной связи 4. |
|||||||
|
|
|||||||||||||
8 |
|
dt |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||
Исключим алгебраические уравнения путем подстановки и получим следующую систему:
T |
dI |
+ I = K |
3 |
M ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
6 |
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
T T |
4 |
|
d 2M |
+ (T + T |
4 |
) |
dM |
+ M = K |
2 |
K |
1 |
(U |
|
− U |
|
); |
|||||||||
|
|
|
|
|
в |
т |
|||||||||||||||||||
2 |
|
|
|
dt |
2 |
|
|
|
2 |
|
|
|
dt |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
T |
|
dUт |
+ U |
т |
= K |
4 |
I . |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
8 |
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Для решения указанной системы методом Рунге-Кутта необходимо, чтобы система содержала только уравнения 1-го порядка, разрешенные относи-
тельно производных. Для этого введем новую переменную y = dM и разрешим dt
полученную систему относительно производных:
dI = (K3M − I) /T6; dt
dM = y ; dt
dy = (K2K1(Uв −Uт ) − M − y(T2 + T4 )) /T2T4; dt
dUт = (K4I − Uт ) /T8 . dt
Для решения полученной системы дифференциальных уравнений САУ необходимо знание начальных условий. Так как целью является построение переходной характеристики САУ, являющейся результатом ее реагирования на входное единичное ступенчатое воздействие, то в качестве начальных условий можно принять следующие: Uв = 1,Uт = 0,M = 0, y = 0, I = 0.
14
Библиографический список рекомендуемой литературы
Основная
1.Бесекерский, В. А. Теория систем автоматического управления [Текст]
/В.А.Бесекерский, Е.П.Попов. – 4-е изд., перераб. и доп. – СПб : Профессия, 2003. – 752 с.
2.Бесекерский, В. А. Руководство по проектированию систем автоматического управления [Текст] / В.А.Бесекерский – М. : Высш. шк., 1983. – 445 с.
3.Макаров И.М. Робототехника и гибкие автоматизированные производства [Текст] / И.М.Макаров.- М. : Высш. шк., 1986.- Кн. 3. – 158 с.
4.Ордынцев, В.М. Математическое описание объектов автоматизации [Текст] / В.М.Ордынцев. - М. : Машиностроение, 1965. – 360 с.
Дополнительная
5.Черняк, А.А. Высшая математика на базе Mathcad. Общий курс. [Текст]
/А.А.Черняк, Ж.А.Черняк, Ю.А.Доманова. – СПб : БХВ-Петербург, 2004. – 608 с.
6.Лазарев, Ю.Ф. MathLab 5.x. [Текст] / Ю.Ф.Лазарев. – К. : Издательская группа BHV, 2000. – 608 с.
15
Приложения
Приложение 1
Задания для выполнения курсовой работы
Задание № 1
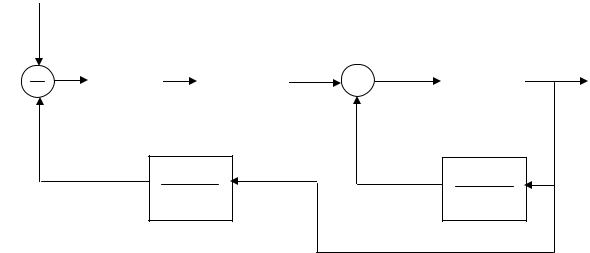
Разработать систему автоматического управления расходом стружки двухагрегатного дозатора. Структурная схема неизменяемой части САУ представлена на рис. П.1.
САУ предназначена для поддержания расхода стружки двухагрегатного дозатора на уровне, определяемом входным (задающим) напряжением Uв. В качестве измеряемого показателя для оценки погонной нагрузки q используют перемещение короткого ленточного конвейера в зависимости от массы материала на ленте (Л). В качестве датчика перемещения L применен потенциометрический датчик (ПД). Вырабатываемое им напряжение Uт сравнивается с задающим напряжением, и разность этих напряжений U=Uв-Uт, пропорциональная отклонению погонной нагрузки q от требуемого значения, подается через регулятор (Р), вырабатывающий ток Iу, и электронный усилитель (У) на электромагнитный вибратор (ЭМВ). Амплитуда колебаний (А) ЭМВ изменяет подачу шихты вибролотковым питателем (ВЛП). Следовательно, изменяется уровень материала на ленте. Аналогично меняется и уровень материала на ленте. В установившемся режиме Uв=Uт и погонная нагрузка q перестает изменяться.
Uв |
|
|
Р |
|
|
У |
|
|
ЭМВ |
|
|
ВЛП |
|
|
Л |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
U |
Wp ( p) |
Jу |
|
K2 |
|
J1 |
|
K |
3 |
|
A |
|
K |
4 |
|
L |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
1+ pT2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
1+ pT |
|
1+ pT |
|
1+ pT |
|
||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
6 |
|
|
8 |
|
|
|
ПД
Uт
K5
Рис. П.1 Структурная схема САУ расходом стружки двухагрегатного дозатора
Задание № 2
Разработать систему автоматического управления температурой в сушильной камере пиломатериалов. Структурная схема неизменяемой части САУ представлена на рис. П.2.
16
Продолжение прил. 1
САУ предназначена для поддержания температуры среды tc на заданном уровне, определяемом Uв, в камере К. Информацию о температуре tc получают от датчика температуры – термометра сопротивления (ТС), включенного в мостовую схему, вырабатывающую напряжение Uт. На выходе схемы сравнения получается сигнал отклонения U=Uв-Uт, который через регулятор (Р) воздействует на вентиль (УВ), управляющий подачей пара в калорифер, обогревающий камеру К. Пар нагревает калорифер до температуры tк. В установившемся режиме Uв=Uт и температура tc перестает изменяться.
Uв
|
Р |
|
|
УВ |
|
К |
|||||||
U |
|
U1 |
|
|
|
tк |
|
|
|
tс |
|||
Wp ( p) |
|
K2 |
|
|
K3 |
|
|||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
1+ pT2 |
|
|
|
|
1+ pT4 |
|
||||
|
|
ТС |
|
|
|
|
|
|
|
|
М |
||
Uт
K5
1+ pT8
K4
1+ pT6
Рис. П.2 Структурная схема САУ температурой в сушильной камере пиломатериалов
Задание № 3
Разработать систему автоматического управления температурой плит пресса. Структурная схема неизменяемой части САУ представлена на рис. П.3.
САУ предназначена для поддержания температуры в плитах пресса (ПП) tо на заданном уровне, определяемом Uв и обеспечивающем требуемое качество процесса горячего прессования. Информацию о температуре tо получают от датчика температуры – термопары (ТП), включенной в потенциометрическую схему, вырабатывающую напряжение Uт. На выходе схемы сравнения получается сигнал отклонения U=Uв-Uт, который через регулятор (Р) подается на обмотку управления двигателя (Д), обеспечивающего поворот на угол α вентиля (В), управляющего подачей пара в плиты. В установившемся режиме Uв=Uт и температура tо перестает изменяться.
17
Продолжение прил. 1
Uв |
|
|
Р |
|
|
Д |
|
В |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
ПП |
|||||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
U |
|
U1 |
|
|
|
α |
|
|
|
tк |
|
|
|
tо |
Wp ( p) |
|
K2 |
|
|
K3 |
|
|
K4 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
1+ pT2 |
|
|
p(1+ pT4) |
|
1+ pT6 |
|
|||||
|
|
|
Uт |
|
|
|
|
|
|
|
ТП |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
K5
1+ pT8
Рис. П.3 Структурная схема САУ температурой в плитах пресса
Задание № 4
Разработать систему автоматического управления процессом прессования в производстве древесностружечных плит. Структурная схема неизменяемой части САУ представлена на рис. П.4.
САУ предназначена для поддержания качества прессования плит на заданном уровне, определяемом Uв. В качестве показателя качества используется уровень перемещения плиты пресса L, информация о величине которого в виде напряжения Uт поступает на схему сравнения от индукционного датчика перемещения (ИД). Сигнал отклонения U=Uв-Uт подается через регулятор на обмотку управления двигателя подачи рабочего тела с расходом q в гидроцилиндр пресса (ГЦ). В установившемся режиме Uв=Uт и L перестает изменяться.
Uв |
|
|
|
|
|
ДП |
|
|
|
|
|
|
ГЦ |
|
||||||
|
|
|
|
|
|
|
Р |
|
|
|
q |
|
|
L |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Wp (p) |
|
K2 |
|
|
|
|
|
|
K3 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
1+ pT2 |
|
|
|
|
|
|
p(1+ pT4) |
|
|||
|
|
|
|
Uт |
|
|
|
|
ИД |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
K4 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
1+ pT6 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Рис. П.4 Структурная схема САУ процессом прессования изделий |
||||||||||||||||
18
Продолжение прил. 1
Конкретные значения параметров динамических звеньев неизменяемой части САУ и требования по качеству процесса управления (регулирования), которым должна соответствовать разрабатываемая САУ, выдаются руководителем курсовой работы.
Задание № 5
Разработать систему автоматического управления нагрузкой главного привода деревообрабатывающего станка. Структурная схема неизменяемой части САУ представлена на рис. П.5.
САУ предназначена для поддержания момента нагрузки М главного привода станка на уровне, определяемом входным (задающим) напряжением Uв. В качестве измеряемого показателя для оценки момента нагрузки используют ток нагрузки I исполнительного двигателя (ИД). В качестве датчика тока I применен трансформатор тока (ТТ). Вырабатываемое им напряжение Uт сравнивается с задающим напряжением, и разность этих напряжений U=Uв-Uт подается через регулятор (Р) на усилитель (У), питающий двигатель подачи (ДП), потребляющий ток Iу. В зависимости от Iу меняется скорость подачи заготовок и, следовательно, момент нагрузки исполнительного двигателя. В установившемся режиме Uв=Uт и ток I перестает изменяться.
Uв
|
|
Р |
|
|
У |
|
|
|
ДП |
|
ИД |
|||||
|
|
U1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Jу |
|
|
|
М |
|
|
|
I |
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Wp ( p) |
|
K2 |
|
|
K3 |
|
|
K4 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
1+ pT2 |
|
|
1+ pT4 |
|
1+ pT6 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uт |
|
|
|
|
|
|
|
|
ТТ |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
K5
Рис. П.5 Структурная схема САУ нагрузкой главного привода деревообрабатывающего станка
Задание № 6
Разработать систему автоматического управления скоростью вращения шпинделей лущильного станка с двигателем постоянного тока. Структурная схема неизменяемой части САУ представлена на рис. П.6.
19
Продолжение прил. 1
САУ предназначена для изменения скорости вращения N шпинделей лущильного станка в зависимости от изменения диаметра чурака. В качестве входного (задающего) воздействия на САУ выступает напряжение Uв, пропорциональное диаметру заготовки. Информацию о числе оборотов N шпинделя станка получают с тахогенератора (ТГ), напряжение которого Uт, пропорциональное N, сравнивается с Uв в схеме сравнения, и сигнал рассогласования U=Uв-Uт подается через регулятор (Р) на усилительно-преобразовательное устройство (УПУ). Выходной ток УПУ I2 подается на обмотку возбуждения генератора постоянного тока (Г), напряжение которого питает двигатель постоянного тока (Д), вращающий шпиндели станка. В установившемся режиме Uв=Uт и скорость вращения N следует за изменением Uв.
Uв
|
|
Р |
|
УПУ |
|
|
Г |
|
|
Д |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Uу |
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
I2 |
|
|
|
|
|
|
|
N |
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Wp ( p) |
|
K2 |
|
|
|
K3 |
|
|
K4 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
(1+ pT2)(1+ pT4) |
|
|
1+ pT6 |
|
1+ pT8 |
|
|
|||||
Uт |
|
ТГ |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
K5
Рис. П.6 Структурная схема САУ скоростью вращения шпинделей лущильного станка с двигателем постоянного тока
Задание № 7
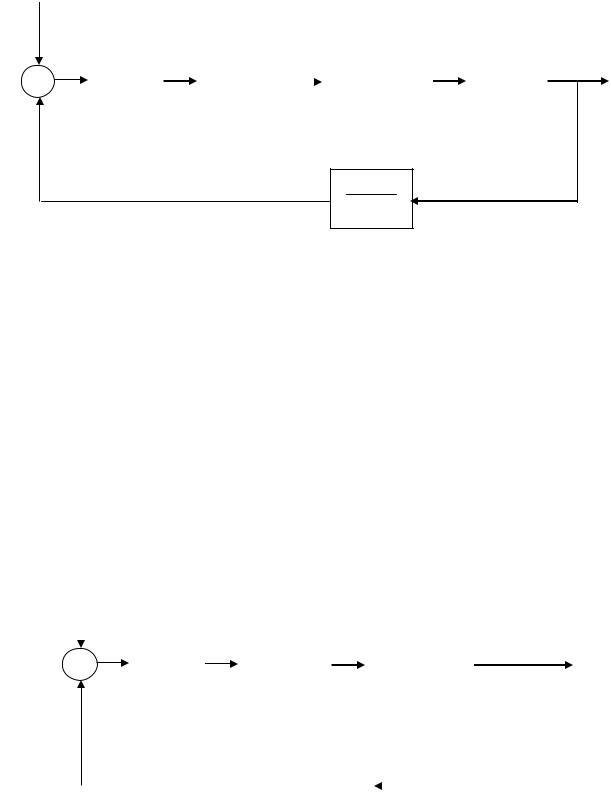
Разработать систему автоматического управления скоростью вращения шпинделей лущильного станка с электромагнитной муфтой скольжения. Структурная схема неизменяемой части САУ представлена на рис. П.7.
САУ предназначена для изменения скорости вращения N шпинделей лущильного станка в зависимости от изменения диаметра чурака. В качестве входного (задающего) воздействия на САУ выступает напряжение Uв, пропорциональное диаметру заготовки. Информацию о скорости вращения N шпинделей станка получают с тахогенератора (ТГ), напряжение которого, пропорциональное N, сравнивается с Uв в схеме сравнения и сигнал рассогласования U=Uв-Uт подается через регулятор (Р) на вход магнитного усилителя (МУ). Выходной ток МУ I1 управляет электромагнитной муфтой скольжения (ЭМС), выходной вал которой вращает шпиндели станка. В установившемся режиме Uв=Uт и скорость вращения N следует за изменением Uв.
20
|
|
|
|
|
|
|
|
|
|
|
|
|
Продолжение прил. 1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
МУ |
|
ЭМС |
|||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
Iу |
|
|
|
I1 |
|
|
|
|
N |
|
|
|
Wp ( p) |
|
|
|
K2 |
|
|
|
|
K3 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
1+ pT2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
(1+ pT4)(1+ pT6) |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТГ
Uт
K4
Рис. П.7 Структурная схема САУ скоростью вращения шпинделей лущильного станка с электромагнитной муфтой скольжения